无刷直流电机(BLDC)数学模型深度解析
无刷直流电机(BLDC)数学模型深度解析
1. 引言
无刷直流电机(Brushless DC Motor,简称BLDC)作为现代电力电子技术与电机技术相结合的产物,已成为工业自动化、航空航天、电动汽车等领域的核心动力元件。与传统有刷直流电机相比,BLDC电机取消了机械换向器和电刷结构,采用电子换向方式,大大提高了电机的可靠性、效率和使用寿命。
要深入理解BLDC电机的工作原理并设计高性能的控制系统,建立准确的数学模型是至关重要的基础。本文将从电磁原理出发,系统推导BLDC电机的数学模型,为电机控制算法的设计与仿真分析提供理论支撑。
2. BLDC电机基本结构和工作原理
2.1 基本结构组成
BLDC电机主要由以下部分组成:
-
定子:通常采用三相集中式或分布式绕组,绕组按120°电角度对称分布
-
转子:采用永磁体结构,磁极对数通常为2对、4对或更多
-
位置传感器:霍尔传感器、光电编码器或旋转变压器等,用于检测转子位置
2.2 电子换向原理
BLDC电机通过检测转子位置信号,控制逆变器中功率开关器件的导通与关断,实现电子换向。三相六状态控制是BLDC最常用的控制方式,每个60°电角度区间内只有两相导通,另一相悬空,形成六步换相序列。
3. BLDC电机数学模型推导
3.1 基本假设
在建立数学模型前,我们作如下合理假设:
-
电机三相绕组完全对称,空间互差120°电角度
-
磁路不饱和,忽略磁滞和涡流效应
-
永磁体产生的气隙磁场呈梯形波分布
-
转子的阻尼效应可以忽略
3.2 电压方程
根据基尔霍夫电压定律,三相绕组的电压平衡方程可表示为:
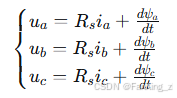
其中,、
、
为三相相电压,
、
、
为三相相电流,
为每相绕组电阻,
、
、
为三相磁链。
各相磁链由电流自感、互感以及永磁体磁链共同作用产生:
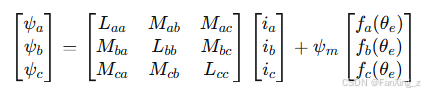
式中,、
、
为各相自感,
、
、
为相同互感,
为永磁体磁链幅值,
、
、
为转子位置相关的梯形波函数,
为电角度。
3.3 电感分析
对于表面贴装式BLDC电机,由于气隙均匀,自感和互感可近似为常数:
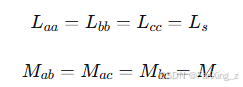
考虑到三相绕组为星形连接且无中线,满足,可得:
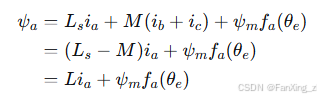
其中,为等效电感。
同理可得其他两相的磁链表达式。将磁链表达式代入电压方程,得到:
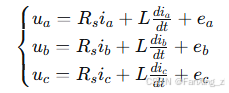
式中,、
、
为三相反电动势:
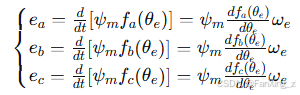
其中,为电角速度。
3.4 反电动势分析
BLDC电机的反电动势波形由永磁体磁场分布和绕组结构决定,理想情况下为梯形波,平顶宽度为120°电角度。梯形波函数可表示为:
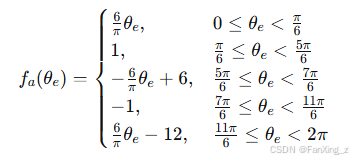
和
函数形式相同,相位依次滞后120°。
3.5 转矩方程
根据机电能量转换原理,电磁转矩可表示为:
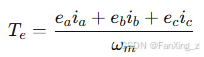
其中,为机械角速度,
为极对数。
在任意时刻,只有两相导通,设导通相的反电动势绝对值为,电流绝对值为
,则电磁转矩可简化为:

其中,为反电动势波形系数,在平顶区
。
3.6 运动方程
根据牛顿第二定律,电机机械运动方程为:
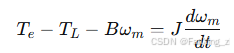
式中,为负载转矩,
为粘滞摩擦系数,
为转动惯量。
4. 状态空间模型
选取三相电流和机械角速度为状态变量,建立BLDC电机的状态空间模型。
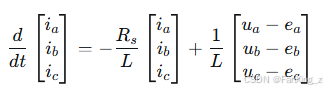
由电压方程可得电流微分方程:
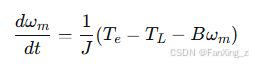
由运动方程可得角速度微分方程:
该状态空间模型为非线性系统,可用于系统动态特性分析和控制器设计。
5. dq坐标系下的数学模型
虽然BLDC电机通常不在dq坐标系下分析,但通过适当变换也可得到其dq模型,便于与永磁同步电机对比分析。
定义dq变换矩阵:

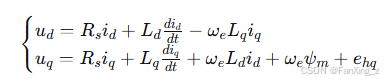
由于BLDC反电动势为非正弦波,dq坐标系下的电压方程包含谐波分量:
其中,为反电动势谐波在q轴上的分量,电磁转矩为:

为谐波转矩分量。对于表面贴装式BLDC电机,,转矩公式简化为:
6. 数学模型在控制中的应用
6.1 仿真模型建立
基于上述数学模型,可在Simulink等环境中搭建BLDC电机仿真模型,主要包括以下模块:
-
电压方程模块
-
反电动势计算模块
-
转矩计算模块
-
运动方程模块
-
逆变器模块
-
换相逻辑模块
6.2 控制策略分析
BLDC电机的经典控制策略包括:
-
六步换相控制:基于霍尔位置信号,简单可靠
-
矢量控制:通过坐标变换实现转矩与磁链解耦控制
-
直接转矩控制:通过滞环控制直接调节转矩和磁链
数学模型为这些控制策略的设计与参数整定提供了理论基础。
7. 结论
本文系统推导了BLDC电机的数学模型,从基本的电压方程、磁链方程到转矩方程和运动方程,建立了完整的理论体系。通过对数学模型的分析,可以得出以下结论:
-
BLDC电机的数学模型本质上是非线性、强耦合的多变量系统
-
反电动势的梯形波特性是BLDC与PMSM的主要区别
-
状态空间模型为系统动态分析和控制器设计提供了便利
-
dq坐标系下的模型揭示了BLDC与PMSM的内在联系与区别
准确的数学模型是高性能BLDC电机控制系统设计的基础,对于电流环设计、转速估算、位置检测等关键技术具有重要指导意义。随着现代控制理论的发展,基于精确数学模型的先进控制算法将在BLDC电机控制中发挥越来越重要的作用。
参考文献
-
Krishnan, R. (2001). Electric Motor Drives: Modeling, Analysis, and Control. Prentice Hall.
-
Pillay, P., & Krishnan, R. (1989). Modeling, simulation, and analysis of permanent-magnet motor drives. IEEE Transactions on Industry Applications, 25(2), 265-273.
-
王成元,夏家宽,杨俊友. (2014). 电机现代控制技术. 机械工业出版社.
-
袁登科,陶生桂. (2010). 交流永磁电机变频调速系统. 机械工业出版社.