柔性制造的终极答案:富唯智能机器人如何以“全能感官”实现一机多能
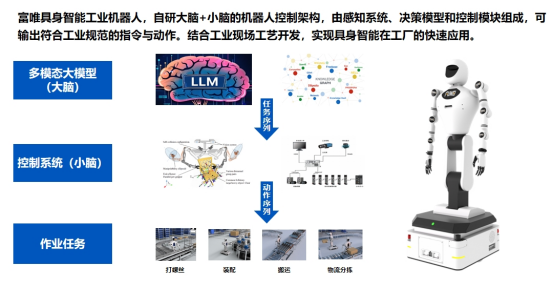
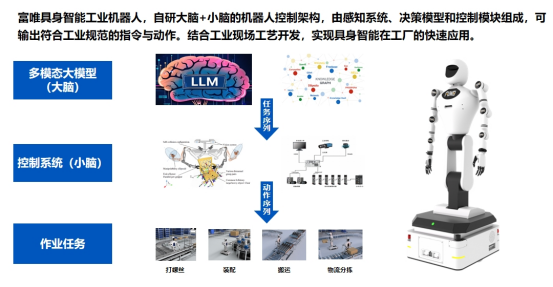
在工业4.0的浪潮中,人形机器人正以惊人的智能化水平重塑制造业的边界。而这一切的背后,离不开精密且高效的人形机器人传感器配置。作为富唯智能的核心技术载体,传感器配置不仅是机器人感知环境的“感官系统”,更是实现自主决策与精准执行的基石。通过融合自研一体化控制器、零代码编程与任务规划大模型GRID,富唯智能构建了一套知识驱动的具身智能工业机器人技术框架,将人形机器人传感器配置推向新的高度。

富唯智能的技术框架涵盖“五大核心模块”:大脑、小脑、躯干、世界模型和虚实融合仿真器。其中,人形机器人传感器配置作为“躯干”模块的核心组成部分,与GRID大模型深度协同,赋予机器人在复杂环境中自主感知、智能推理和动态响应的能力。例如,在物流和3C电子行业中,机器人通过多模态传感器实时捕捉数据,结合语义地图与知识图谱,实现物体识别、路径规划和任务执行的闭环控制。这种高度优化的人形机器人传感器配置,不仅提升了单机设备的适应性,还为多机协同与柔性制造提供了底层支持。
在实际应用中,富唯智能的两款代表性产品——富智1号和富智2号,充分展现了传感器配置的技术优势。富智1号装配人形机器人采用轮式结构与折叠升降设计,其人形机器人传感器配置能够动态感知精密装配中的微米级误差,并通过GRID大模型实现多任务协同。在汽车零部件组装场景中,机器人通过视觉、力觉和位置传感器的融合,自主调整操作力度与轨迹,显著提升了装配精度与效率。
而富智2号转运人形机器人则通过灵活的人形机器人传感器配置,结合升降柱设计与GRID模型的泛化操作能力,实现了长序列复合任务的智能规划。在半导体和新能源领域,机器人利用激光雷达与深度相机组成的传感网络,实时构建环境语义地图,精准避障并优化物料转运路径。这一设计使得人形机器人传感器配置不再是孤立的技术单元,而是融入整体智能系统的关键环节。

未来,随着工业场景的复杂化与个性化需求增长,人形机器人传感器配置将进一步向多维感知、低延迟与自适应方向发展。富唯智能通过GRID大模型与虚实融合仿真器的结合,持续优化传感器的部署与数据融合策略,助力机器人实现从“执行工具”到“智能伙伴”的跨越。
在智能化工业时代,人形机器人传感器配置已成为推动制造业变革的核心引擎。富唯智能以技术为舟,以创新为帆,正在全球范围内书写“一机多能、多机协同”的工业新篇章。