深度相机结构光vs.激光雷达
深度相机的结构光(Structured Light)与激光雷达(LiDAR)均为获取三维空间深度信息的传感技术,但二者在技术原理、性能特性、应用场景等维度存在本质区别。
简单来说,结构光是 “通过已知光图案的形变算深度”,激光雷达是 “通过激光束的飞行时间 / 位置算距离”,核心差异可从以下维度展开:
一、核心技术原理:从 “图案形变” 到 “激光扫描”
两者的根本区别在于深度信息的计算逻辑,具体原理如下:
1. 结构光(深度相机技术方案之一)
结构光属于 “主动三角测量” 技术,核心是通过 “发射已知图案的光 + 接收图案形变” 反推深度,流程如下:
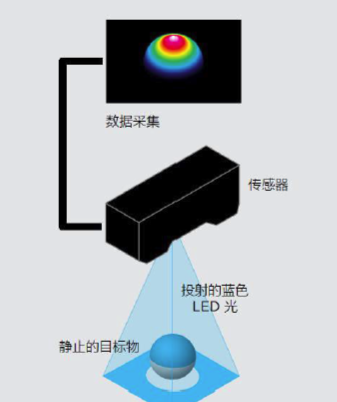
- 步骤 1:发射编码光:由红外发射器(如 VCSEL 垂直腔面激光器)向目标场景投射 “已知结构的光图案”—— 常见类型包括:
- 散斑结构光(如苹果 Face ID):投射随机分布的 “微米级散斑”(类似无数个小光斑);
- 条纹结构光:投射连续的条纹 / 网格图案(如早期工业检测设备)。
- 步骤 2:接收形变图案:由专用红外 CMOS 传感器接收目标反射的光图案 —— 由于目标各点距离不同,图案会产生 “拉伸、偏移” 等形变。
- 步骤 3:计算深度:通过预设算法(基于三角几何原理),对比 “原始图案” 与 “形变图案” 的差异,反推目标各点的三维坐标(深度值)。
2. 激光雷达(LiDAR:Light Detection and Ranging)

激光雷达属于 “主动测距 + 扫描” 技术,核心是通过 “发射激光束 + 测量回波时间 / 角度” 计算距离,再通过扫描覆盖整个场景,流程如下:
- 步骤 1:发射激光束:由激光发射器(如半导体激光器、光纤激光器)发射高能量、窄脉冲的激光束(通常为近红外或紫外光)。
- 步骤 2:测量回波信号:由光电探测器(如 APD 雪崩二极管、SPAD 单光子雪崩二极管)接收激光遇到目标后的反射回波,核心测量两个关键信息:
- 飞行时间(ToF):计算激光从发射到接收的时间差,结合光速(c=3×10⁸m/s),通过公式
距离 = (光速×时间差)/2直接得到单点距离(最主流方案); - 三角测量:部分短量程激光雷达通过测量回波的角度偏移,结合发射器与探测器的固定间距,用三角几何算距离(类似结构光,但仅针对单点)。
- 飞行时间(ToF):计算激光从发射到接收的时间差,结合光速(c=3×10⁸m/s),通过公式
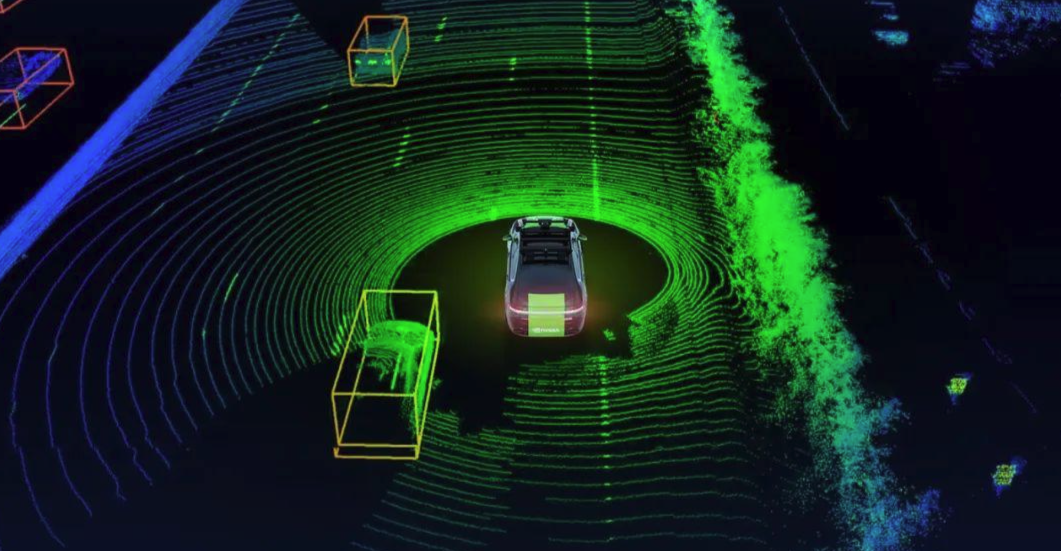
- 步骤 3:扫描构建点云:通过机械扫描(如旋转镜)、MEMS 微振镜扫描或 Flash 面阵扫描(无运动部件),让激光束覆盖目标场景的所有区域,最终将无数 “单点距离” 组合成三维点云(点云即场景的三维坐标集合)。
二、关键性能参数对比:精度、量程、抗干扰性等
性能差异直接决定了二者的应用边界,具体对比如下表:
| 性能维度 | 结构光(深度相机) | 激光雷达(LiDAR) |
|---|---|---|
| 测量精度 | 高(近距离):通常 ±1% 以内,如 1 米距离误差<1cm | 中 - 高(随量程变化):短量程 ±1%,长量程 ±5%(如 100 米误差<5cm) |
| 有效量程 | 短:通常 0.1m~10m(受发射光功率、环境光影响) | 长:短量程(0.1m10m)、中量程(10m100m)、长量程(100m~500m+,如自动驾驶激光雷达) |
| 帧率 | 高:通常 30~60fps(可实时输出深度图) | 中 - 低:机械扫描型约 10~20fps,Flash 型可达 30fps(帧率与扫描范围负相关) |
| 抗干扰能力 | 弱:易受强光(如阳光)、高反射 / 低反射物体影响(图案易淹没或形变不准确) | 强:激光束能量集中、波长特定(多为 905nm/1550nm),抗阳光、环境光干扰能力强 |
| 环境适应性 | 差:适合室内 / 弱光场景,户外强光下精度骤降 | 好:支持室内外全天候(雨、雾、雪天性能会下降,但优于结构光) |
| 点云密度 | 固定(与传感器分辨率一致):如 1280×720 像素深度图,对应 92 万点 / 帧 | 可变(与扫描方式相关):机械扫描约几十万点 / 帧,Flash 型可达百万点 / 帧 |
三、应用场景:从 “消费电子” 到 “自动驾驶”
性能差异决定了二者的应用领域完全不同,核心场景如下:
1. 结构光:近距离、高精度的 “消费 / 工业场景”
由于量程短、抗干扰弱,但成本低、体积小,结构光主要用于室内或近距离场景:
- 消费电子:手机人脸识别(如苹果 Face ID)、平板 / 笔记本的手势控制、AR 眼镜的空间定位(如早期 Hololens);
- 工业领域:工业质检(如零件尺寸测量)、机器人抓取(近距离定位物体);
- 生活服务:安防监控(人脸活体检测)、体感游戏(如 Xbox Kinect 初代)。

2. 激光雷达:长距离、强抗扰的 “户外 / 高端场景”
由于量程远、环境适应性强,激光雷达主要用于户外或需要高精度三维建模的场景:
- 自动驾驶:作为核心传感器(与摄像头、毫米波雷达互补),检测车辆、行人、障碍物的距离和轮廓(如特斯拉、小鹏的自动驾驶方案);
- 机器人导航:户外无人机器人(如巡检机器人、配送机器人)的定位与避障;
- 测绘勘探:地形测绘、城市三维建模、矿山 / 森林资源勘探(如无人机载激光雷达);
- 高端安防:边境线、大型园区的远距离入侵检测。
四、成本与体积:消费级 vs 工业级
- 结构光:成本低(核心部件为红外 LED/VCSEL + 普通 CMOS 传感器,无复杂扫描机构)、体积小(可集成到手机、平板等小型设备中),属于 “消费级” 技术;
- 激光雷达:成本高(核心部件为高功率激光器 + 高精度探测器 + 扫描机构,尤其是长量程激光雷达)、体积较大(早期机械扫描型激光雷达如 “大花盆”,近年 MEMS 型体积缩小但成本仍较高),过去以 “工业级” 为主,近年随自动驾驶需求推动,成本逐步下降(如国产激光雷达已降至千元级)。
总结:核心差异与选择逻辑
| 对比维度 | 结构光(深度相机) | 激光雷达(LiDAR) |
|---|---|---|
| 核心逻辑 | 图案形变 + 三角测量 | 激光测距 + 扫描构建点云 |
| 核心优势 | 近距离精度高、成本低、体积小、帧率高 | 量程远、抗干扰强、环境适应性好 |
| 核心劣势 | 量程短、抗强光弱、户外性能差 | 成本高、体积较大(部分方案)、帧率较低 |
| 典型场景 | 消费电子(人脸识别)、室内机器人、工业质检 | 自动驾驶、户外测绘、无人机器人导航 |
选择逻辑:
若需 “近距离、低成本、室内场景” 的深度感知,选结构光;
若需 “长距离、强抗扰、户外 / 高端场景” 的三维建模,选激光雷达。