18002.机器人电机姿态控制
文章目录
- 1 背景
- 2 实现过程
- 2 双线性插值算法
- 结论
1 背景
通过3个电机实现对机器人脖子的控制,包括俯仰, 翻滚,偏航。其中俯仰和翻滚 由2个电机共同控制,偏航由单独电机控制。
2 实现过程
通过对脖子进行极限测试,分别俯仰, 翻滚的极值数据,并进行记录。
人的脖子目视正前方定义为pitch 为0,roll为0, yaw 为0.
角度值 电机1 电机2
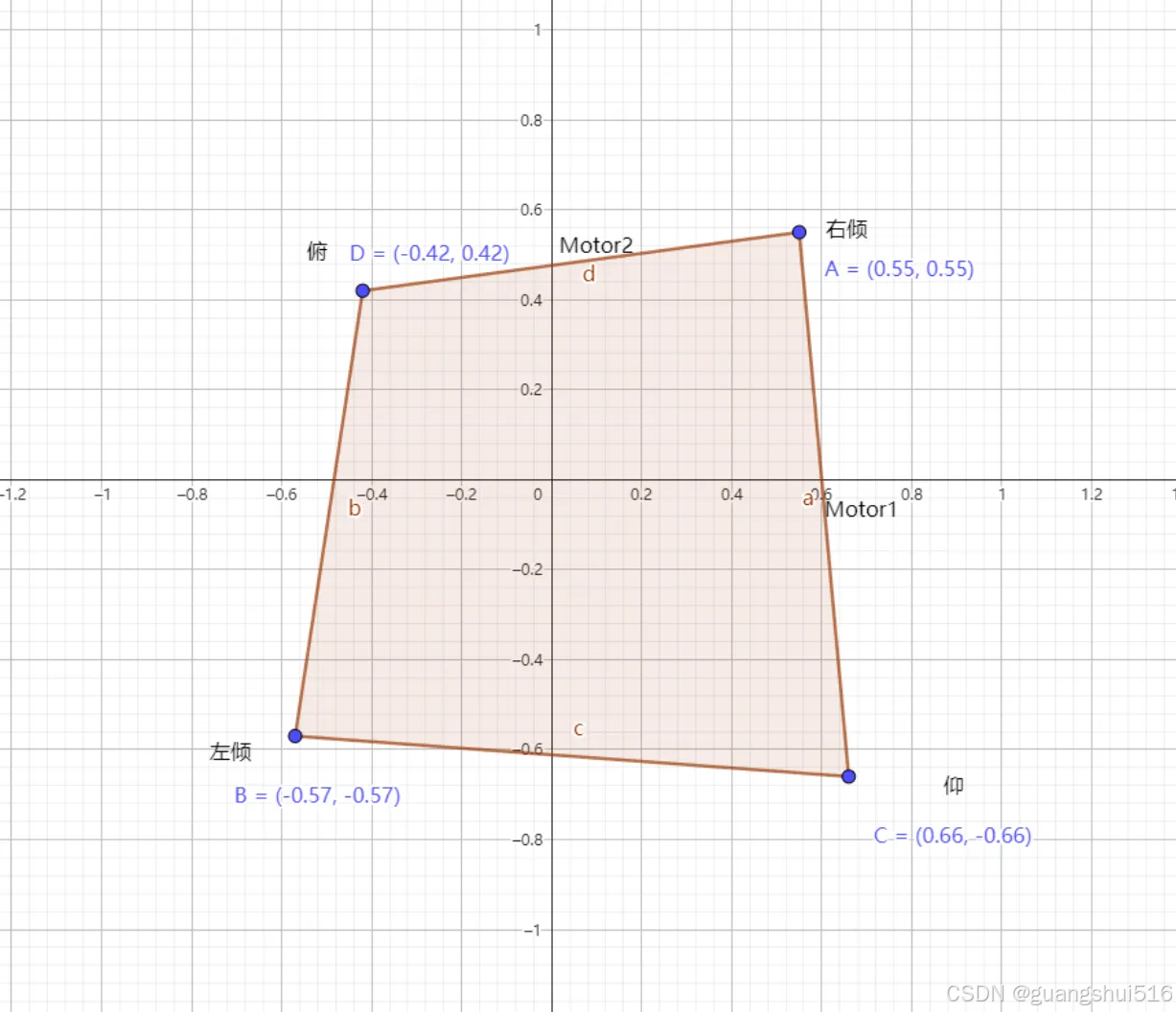
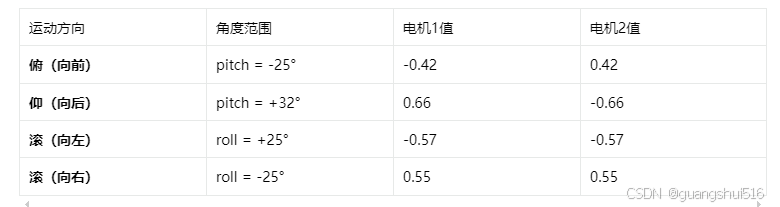
俯(负) 向前25度 D1 = -0.42 ,D2 = 0.42
仰(正) 向后32度 C1 = 0.66 , C2 = -0.66
滚(正) 向左25度 B1 = -0.57, B2 = -0.57
滚 (负) 向右25度 A1 = 0.55 , A2 = 0.55
2 双线性插值算法
#include <vector>
#include <cmath>
#include <algorithm>/*** @brief 将脖子的俯仰和翻滚角度映射到两个电机的控制值,基于精确的四个关键点对应关系* @param pitch_rad 俯仰角(弧度)。向前俯为负,向后仰为正。* @param roll_rad 翻滚角(弧度)。向左翻滚为正,向右翻滚为负。* @param yaw_rad 偏航角(弧度)。当前映射关系未定义,保留参数。* @return std::vector<float> 包含两个电机控制值的向量:[motor1, motor2, 0]。*/
std::vector<float> parallelMapping(float pitch_rad, float roll_rad, float yaw_rad = 0.0f) {// 1. 将弧度转换为角度float pitch_deg = pitch_rad * 180.0f / M_PI;float roll_deg = roll_rad * 180.0f / M_PI;// 2. 定义关键点坐标(基于您提供的精确数据)// 俯仰运动关键点const float PITCH_FORWARD_DEG = -25.0f; // D点:前俯25°const float PITCH_FORWARD_M1 = -0.42f; // D点电机1值const float PITCH_FORWARD_M2 = 0.42f; // D点电机2值const float PITCH_BACKWARD_DEG = 32.0f; // C点:后仰32°const float PITCH_BACKWARD_M1 = 0.66f; // C点电机1值const float PITCH_BACKWARD_M2 = -0.66f; // C点电机2值// 翻滚运动关键点const float ROLL_LEFT_DEG = 25.0f; // B点:左翻滚25°const float ROLL_LEFT_M1 = -0.57f; // B点电机1值const float ROLL_LEFT_M2 = -0.57f; // B点电机2值const float ROLL_RIGHT_DEG = -25.0f; // A点:右翻滚25°const float ROLL_RIGHT_M1 = 0.55f; // A点电机1值const float ROLL_RIGHT_M2 = 0.55f; // A点电机2值// 3. 对输入角度进行安全限幅pitch_deg = std::clamp(pitch_deg, PITCH_FORWARD_DEG, PITCH_BACKWARD_DEG);roll_deg = std::clamp(roll_deg, ROLL_RIGHT_DEG, ROLL_LEFT_DEG);// 4. 初始化电机输出值float motor1 = 0.0f;float motor2 = 0.0f;// 5. 计算俯仰(pitch)分量对电机的贡献if (pitch_deg >= 0) {// 后仰运动:在C点(32°, 0.66, -0.66)和原点(0°, 0, 0)之间线性插值float t_pitch = pitch_deg / PITCH_BACKWARD_DEG; // 归一化参数 [0, 1]motor1 += PITCH_BACKWARD_M1 * t_pitch;motor2 += PITCH_BACKWARD_M2 * t_pitch;} else {// 前俯运动:在D点(-25°, -0.42, 0.42)和原点(0°, 0, 0)之间线性插值float t_pitch = -pitch_deg / PITCH_FORWARD_DEG; // 取绝对值,归一化参数 [0, 1]motor1 += PITCH_FORWARD_M1 * t_pitch;motor2 += PITCH_FORWARD_M2 * t_pitch;}// 6. 计算翻滚(roll)分量对电机的贡献if (roll_deg >= 0) {// 左翻滚运动:在B点(25°, -0.57, -0.57)和原点(0°, 0, 0)之间线性插值float t_roll = roll_deg / ROLL_LEFT_DEG; // 归一化参数 [0, 1]motor1 += ROLL_LEFT_M1 * t_roll;motor2 += ROLL_LEFT_M2 * t_roll;} else {// 右翻滚运动:在A点(-25°, 0.55, 0.55)和原点(0°, 0, 0)之间线性插值float t_roll = -roll_deg / ROLL_RIGHT_DEG; // 取绝对值,归一化参数 [0, 1]motor1 += ROLL_RIGHT_M1 * t_roll;motor2 += ROLL_RIGHT_M2 * t_roll;}// 7. 对最终的电机输出值进行安全限幅motor1 = std::clamp(motor1, -1.0f, 1.0f);motor2 = std::clamp(motor2, -1.0f, 1.0f);return {motor1, motor2, 0.0f}; // 第三个值保留给yaw,当前未使用
}
// 测试几个典型角度组合
int main() {// 中立位置(所有角度为0)auto result1 = parallelMapping(0.0f, 0.0f, 0.0f);printf("中立: motor1=%.2f, motor2=%.2f\n", result1[0], result1[1]);// 最大后仰(pitch = 32° ≈ 0.56弧度)auto result2 = parallelMapping(0.56f, 0.0f, 0.0f);printf("后仰: motor1=%.2f, motor2=%.2f\n", result2[0], result2[1]);// 最大前俯(pitch = -25° ≈ -0.44弧度)auto result3 = parallelMapping(-0.44f, 0.0f, 0.0f);printf("前俯: motor1=%.2f, motor2=%.2f\n", result3[0], result3[1]);// 组合运动:中等后仰+左翻滚auto result4 = parallelMapping(0.3f, 0.2f, 0.0f);printf("组合: motor1=%.2f, motor2=%.2f\n", result4[0], result4[1]);return 0;
}
结论
经过测试,该算法符合设计要求, 通过输入俯仰角,计算出来电机数值。