Livox-Mid360驱动安装(ROS1/Ubuntu20.04)
一、接线连接
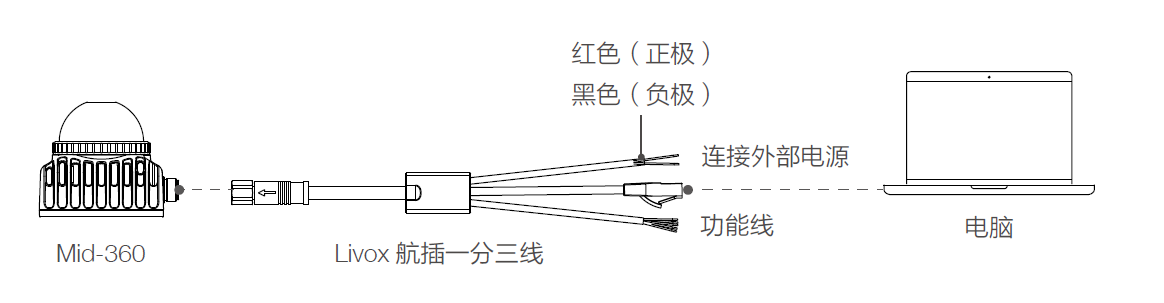
livox MID-360航插一分三线,其中航空母头连接到mid360,网线连接到个人电脑,电源需要DC 9~27 V,推荐使用 12 V,注意正负极。
二、安装上位机可视化工具
去官网下载可视化软件到相应目录,网址:LiDAR Sensors - Livox
# 进入下载目录
unzip "LivoxViewer2 for Ubuntu v2.3.0.zip"
cd "LivoxViewer2 for Ubuntu v2.3.0"
chmod +x LivoxViewer2.sh
./LivoxViewer2.sh(这个工具还可以对雷达进行一些基本设置)
三、安装ROS驱动
3.1 静态IP设置
在设置中,将电脑ip地址设置为192.168.1.50,子网掩码设置为255.255.255.0

3.2 下载并安装SDK2
1.创建工作空间:
mkdir -p livox_ws/src
cd ~/livox_ws/src2.下载SDK2:
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd Livox-SDK2/
mkdir build && cd build
cmake ..
make -j
sudo make install
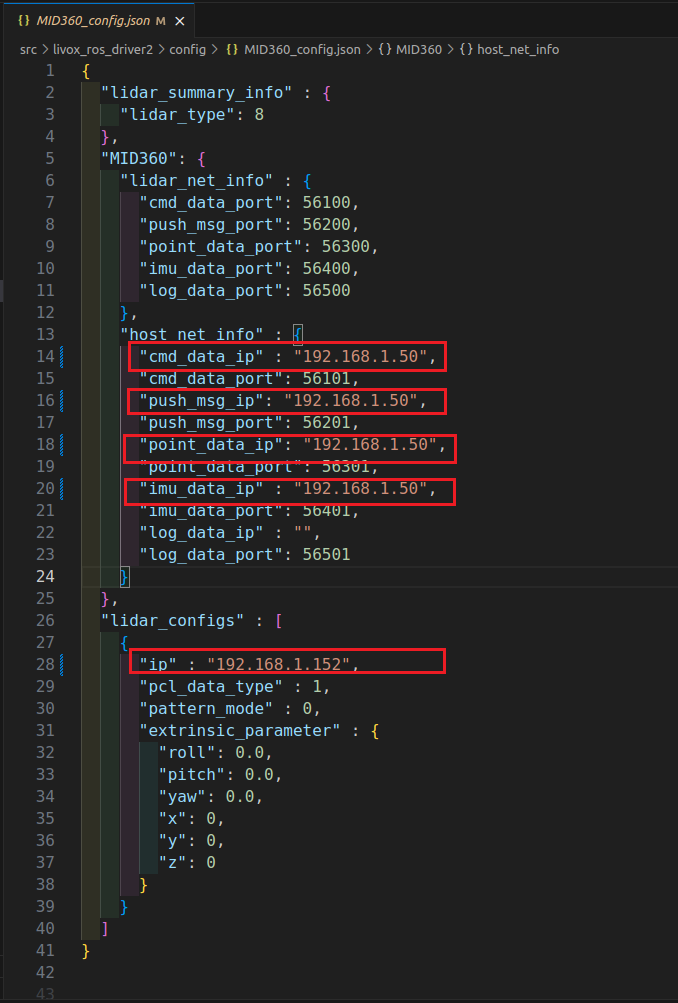
3.需要修改Livox-SDK2/samples/livox_lidar_quick_start/mid360_config.json中的host_ip:
"host_ip" : "192.168.1.50",3.3 下载并安装ROS驱动(ros driver2)
1.ROS Noetic环境下编译:
# 进入上一步创建的工作空间
cd livox_ws/src
# 下载Livox ROS Driver 2,不要下载错版本
git clone https://github.com/Livox-SDK/livox_ros_driver2.git# For ros1
cd livox_ros_driver2
source /opt/ros/noetic/setup.sh
./build.sh ROS12.修改ws_livox/src/livox_ros_driver2/config/MID360_config.json中主机IP cmd_data_ip和雷达IP,其中雷达IP 192.168.1.1XX,后两位(xx)为雷达S/N码(可以在雷达包装盒和雷达下面找到)的最后两位。
3.4 启动MID360驱动
cd ws_livox
source devel/setup.sh
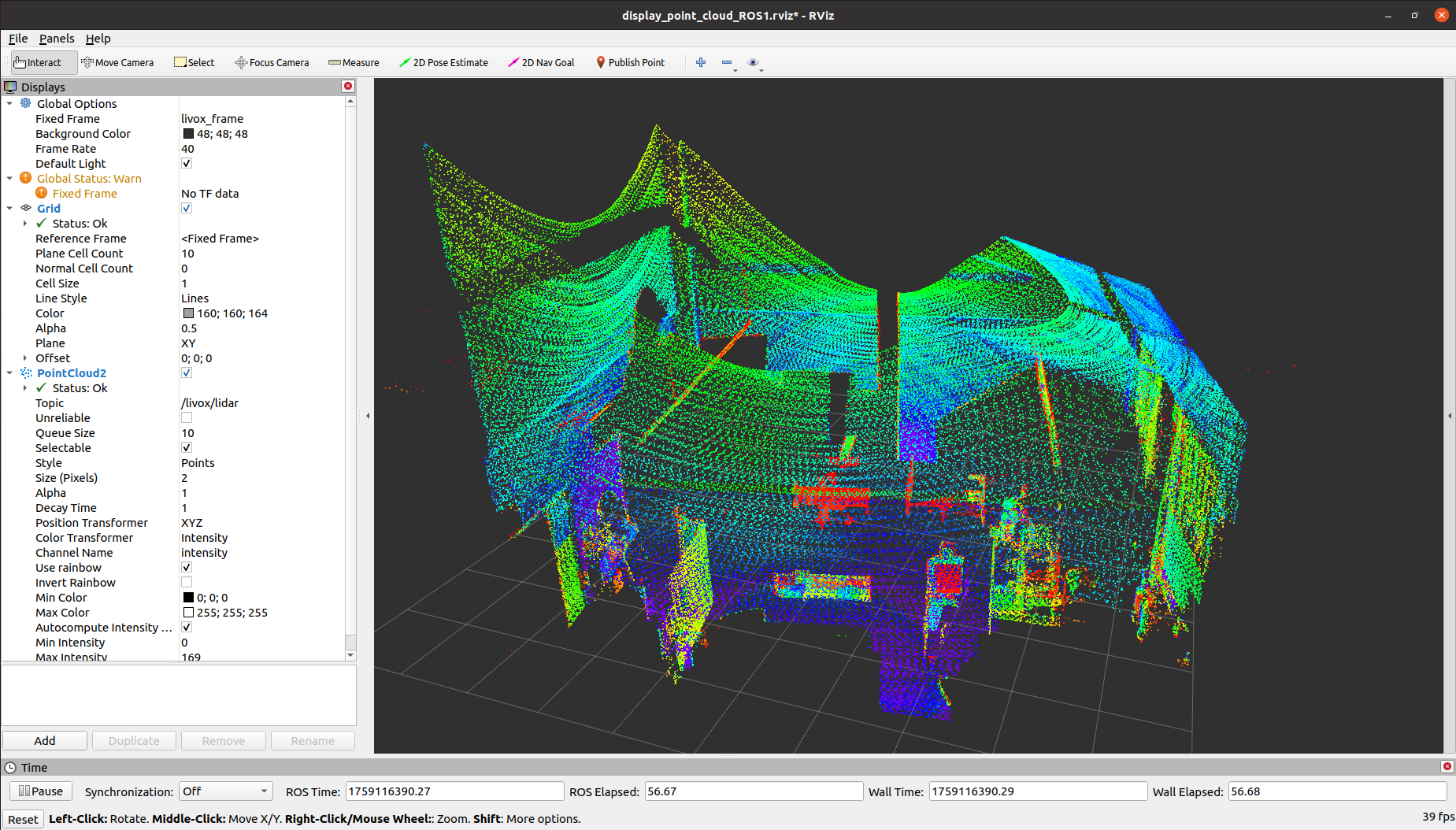
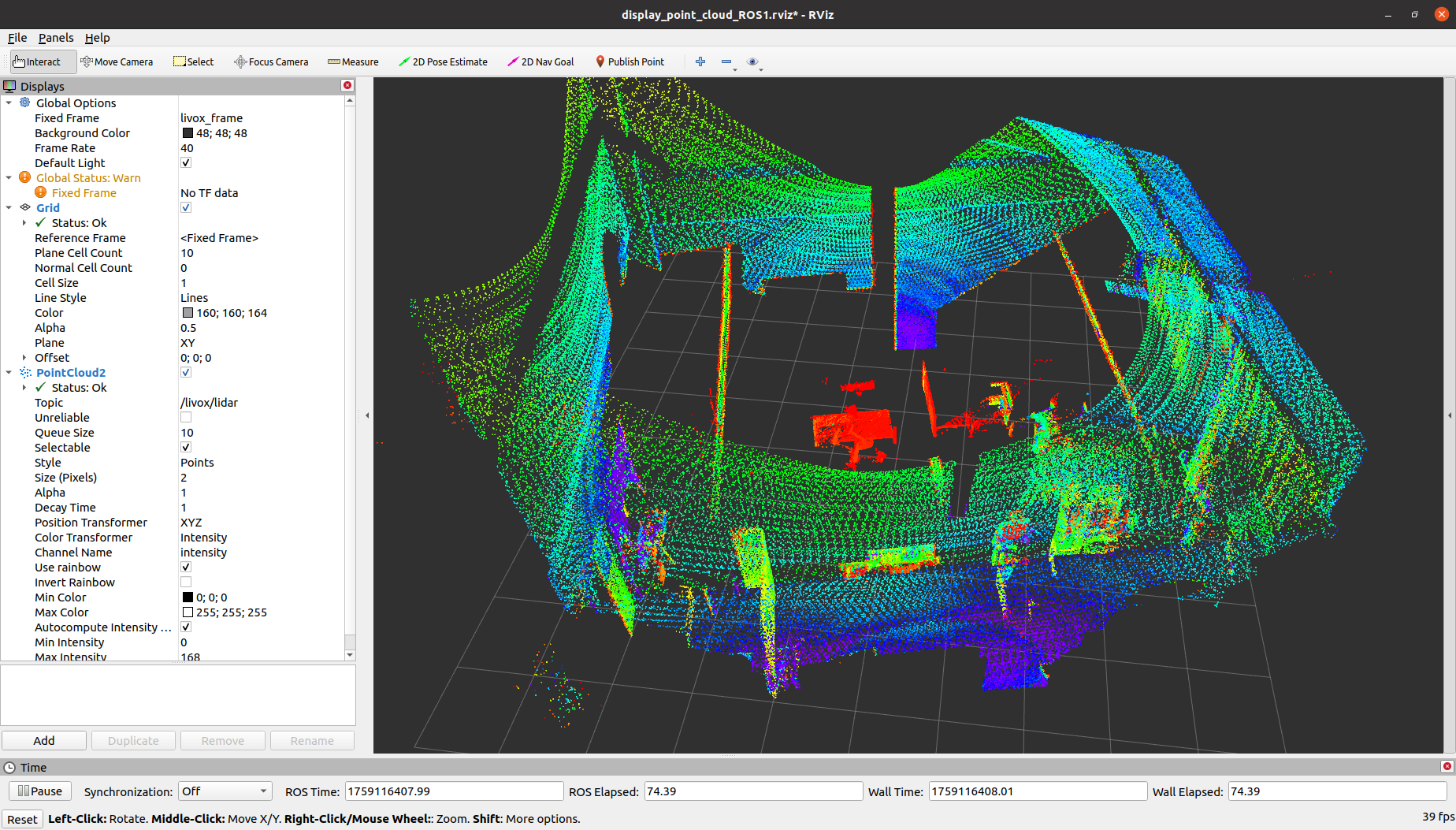
roslaunch livox_ros_driver2 rviz_MID360.launch
在rviz中就可以看到点云可视化了:
3.5 文件说明
1. livox_ws/src/livox_ros_driver2/launch_ROS1目录下launch文件说明
| launch file name | Description |
| rviz_MID360.launch | Connect to MID360 LiDAR device Publish pointcloud2 format data Autoload rviz |
| msg_MID360.launch | Connect to MID360 LiDAR device Publish livox customized pointcloud data |
2. rviz_MID360.launch一些重要参数
| Parameter | Detailed description | Default |
| publish_freq | 设置点云发布频率;浮点型;最大发布频率100.0Hz | 10.0 |
| multi_topic | 0-所有雷达设备使用相同的话题发布点云数据 | 0 |
| xfer_format | 设置点云格式: 0-Livox pointcloud2点云格式 1-Livox 自定义点云格式 2- PCL库中的标准pointcloud2点云格式 | 0 |
自此完毕。
参考资料:
https://blog.csdn.net/Spacegene/article/details/135702828
https://blog.csdn.net/m0_62948300/article/details/139782954
https://blog.csdn.net/Hahalim/article/details/129414327