目标检测:yolov7算法在RK3588上部署
YOLOv7是YOLO(You Only Look Once)系列实时目标检测算法的重要里程碑,由WongKinYiu团队在2022年提出。作为单阶段目标检测器的杰出代表,YOLOv7在保持高速推理的同时,显著提升了检测精度,成为工业界和学术界广泛应用的先进模型。
核心架构创新
YOLOv7采用精心设计的网络架构,引入扩展高效层聚合网络(E-ELAN),通过分组卷积、特征重排列等策略优化特征提取能力。该结构在保持梯度路径完整性的同时,增强了不同特征层的信息融合效率。模型还采用了基于串联的模型缩放方法,能够智能平衡计算复杂度与特征表达能力。
训练策略突破
YOLOv7提出了一系列创新的训练技术:
-
计划重参数化卷积:将训练时的多分支结构与推理时的单一分支巧妙结合,提升性能而不增加推理时间
-
辅助头训练:在中间层添加辅助检测头,加强梯度传播和特征学习
-
标签分配策略:改进的软标签分配方法,提供更精确的监督信号
性能表现卓越
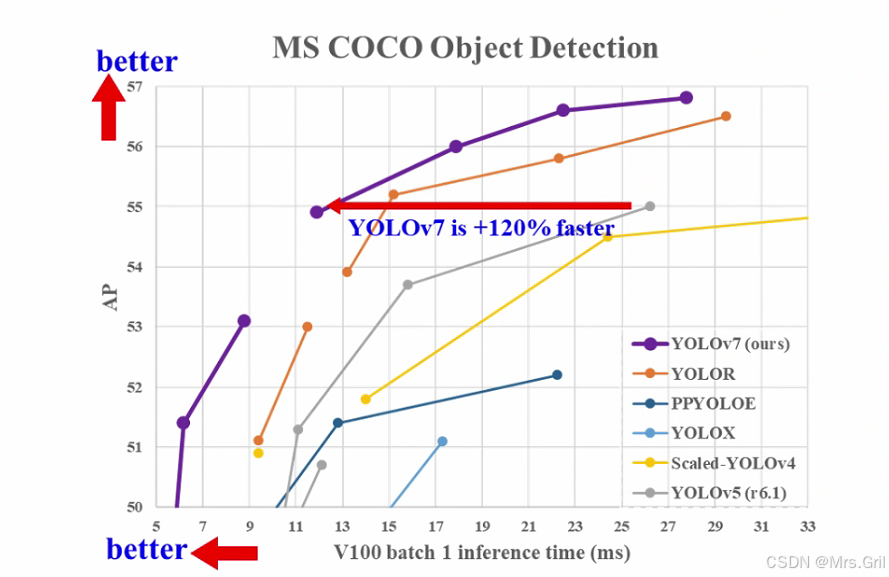
在COCO数据集测试中,YOLOv7展现出色性能:在30FPS实时推理条件下达到56.8% AP,超越同规模YOLO版本和Transformer-based检测器。模型提供多种规格(YOLOv7-tiny到YOLOv7-W6),满足从移动端到服务器端的多样化部署需求。
应用优势明显
YOLOv7支持目标检测、实例分割、姿态估计等多任务,具有出色的工程实用性。其优化的计算效率使模型在边缘设备上也能流畅运行,为自动驾驶、视频监控、工业质检等领域提供了可靠的视觉解决方案。开源社区的活跃维护和持续优化,进一步巩固了YOLOv7在实时目标检测领域的领先地位。
总体而言,YOLOv7通过架构创新与训练策略的完美结合,在速度-精度权衡方面达到了新的高度,为实际应用场景提供了强有力的技术支撑。
github网址:
WongKinYiu/yolov7: Implementation of paper - YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors (github.com)![]() https://github.com/WongKinYiu/yolov7?tab=readme-ov-file
https://github.com/WongKinYiu/yolov7?tab=readme-ov-file
onnx转RKNN
import cv2
import numpy as npfrom rknn.api import RKNN
import osif __name__ == '__main__':isQUANT = True # True platform = 'rk3588'NAME = "yolov7"ONNX_DIR = "./"OUT_DIR = "./"Width = 640Height = 640MODEL_PATH = ONNX_DIR + NAME + '.onnx'RKNN_NAME = NAMEif isQUANT:RKNN_NAME = NAME + '_quant'else:RKNN_NAME = NAME + '_FP16'NEED_BUILD_MODEL = TrueDATASET = './dataset.txt'im_file = '/home/zdl/rknn_project/rtdetrv2/d1/t_15_00083.bmp'# Create RKNN objectrknn = RKNN(verbose=False,verbose_file="./outputlog.txt")RKNN_MODEL_PATH = './{}/{}.rknn'.format(OUT_DIR,RKNN_NAME)if NEED_BUILD_MODEL:# rknn.config(mean_values=[[0,0,0]], std_values=[[1,1,1]], target_platform=platform,disable_rules=['fuse_two_gather'] )rknn.config(mean_values=[[0,0,0]], std_values=[[255.0,255.0,255.0]],target_platform=platform)# rknn.config(mean_values=[[0]], std_values=[[255]],target_platform=platform)# Load modelprint('--> Loading model')ret = rknn.load_onnx(MODEL_PATH,outputs=["onnx::Reshape_491","onnx::Reshape_505","onnx::Reshape_519"])# ret = rknn.load_onnx(MODEL_PATH)if ret != 0:print('load model failed!')exit(ret)print('done')# Build modelprint('--> Building model')ret = rknn.build(do_quantization=isQUANT, dataset=DATASET)# rknn.accuracy_analysis(inputs=["./errors/2.jpg","./errors/3.jpg"],# output_dir='snapshot')# ret = rknn.accuracy_analysis(inputs=[im_file],output_dir='snapshot')if ret != 0:print('build model failed.')exit(ret)print('done')# Export rknn modelif not os.path.exists(OUT_DIR):os.mkdir(OUT_DIR)print('--> Export RKNN model: {}'.format(RKNN_MODEL_PATH))ret = rknn.export_rknn(RKNN_MODEL_PATH)if ret != 0:print('Export rknn model failed.')exit(ret)print('done')else:ret = rknn.load_rknn(RKNN_MODEL_PATH)rknn.release()cpp
//
// Created by zdl on 25-1-20.
//
#include "YoloV5.h"inline static int clamp(float val, int min, int max) {return val > min ? (val < max ? val : max) : min;
}static float sigmoid(float x) { return 1.0 / (1.0 + expf(-x)); }static float unsigmoid(float y) { return -1.0 * logf((1.0 / y) - 1.0); }inline static int32_t __clip(float val, float min, float max)
{float f = val <= min ? min : (val >= max ? max : val);return f;
}static int8_t qnt_f32_to_affine(float f32, int32_t zp, float scale)
{float dst_val = (f32 / scale) + zp;int8_t res = (int8_t)__clip(dst_val, -128, 127);return res;
}static float deqnt_affine_to_f32(int8_t qnt, int32_t zp, float scale) { return ((float)qnt - (float)zp) * scale; }int V5::proprecessV5(std::vector<rknn_output> output, std::vector<float> out_scales,std::vector<int32_t> out_zps,std::vector<cv::Rect> &boxes,std::vector<float> &confidences,std::vector<int> &classids,std::vector<int> &anchorf,float confThres)
{int num_output = output.size();int anchorfuture = 0;for (int n = 0; n < num_output; n++) {int grid_w = modelInputSize.width / strides[n]; // 宽int grid_h = modelInputSize.height / strides[n]; // 高int grid_len = grid_w * grid_h;int8_t *data = (int8_t*)output[n].buf;
// std::cout << "size: " << output[n].size << std::endl;float thres = unsigmoid(confThres);int8_t thres_i8 = qnt_f32_to_affine(thres, out_zps[n], out_scales[n]);for (int a = 0; a < 3; a++) {for (int i = 0; i < grid_h; i++) {for (int j = 0; j < grid_w; j++) {int8_t box_confidence = data[(PROP_BOX_SIZE * a + 4) * grid_len + i * grid_w + j];if (box_confidence >= thres_i8) {int offset = (PROP_BOX_SIZE * a) * grid_len + i * grid_w + j;int8_t* in_ptr = data + offset;float box_x = sigmoid(deqnt_affine_to_f32(*in_ptr, out_zps[n], out_scales[n])) * 2.0 - 0.5;float box_y = sigmoid(deqnt_affine_to_f32(in_ptr[grid_len], out_zps[n], out_scales[n])) * 2.0 - 0.5;float box_w = sigmoid(deqnt_affine_to_f32(in_ptr[2 * grid_len], out_zps[n], out_scales[n])) * 2.0;float box_h = sigmoid(deqnt_affine_to_f32(in_ptr[3 * grid_len], out_zps[n], out_scales[n])) * 2.0;box_x = (box_x + j) * (float)strides[n];box_y = (box_y + i) * (float)strides[n];box_w = box_w * box_w * (float)anchors.at(strides[n])[a][0];box_h = box_h * box_h * (float)anchors.at(strides[n])[a][1];box_x -= (box_w / 2.0);box_y -= (box_h / 2.0);int8_t maxClassProbs = in_ptr[5 * grid_len];int maxClassId = 0;for (int k = 1; k < DetNumLabel; ++k) {int8_t prob = in_ptr[(5 + k) * grid_len];if (prob > maxClassProbs) {maxClassId = k;maxClassProbs = prob;}}if (maxClassProbs>thres_i8){confidences.push_back(sigmoid(deqnt_affine_to_f32(maxClassProbs, out_zps[n], out_scales[n]))* sigmoid(deqnt_affine_to_f32(box_confidence, out_zps[n], out_scales[n])));classids.push_back(maxClassId);cv::Rect rect;rect.x = box_x;rect.y = box_y;rect.width = box_w;rect.height = box_h;
// boxes.push_back(rect);boxes.push_back(cv::Rect(box_x, box_y, (int)((box_w)), (int)((box_h)))); // 记录框anchorf.push_back(n);}}}}}}return 0;
}cv::Mat V5::letterboxYolo(cv::Mat src, int &x_pad, int &y_pad, float &scale,int &channel)
{if(channel == 1){cv::cvtColor(src,src,cv::COLOR_BGR2GRAY);}int input_w = modelInputSize.width; // 模型输入的宽int input_h = modelInputSize.height; // 模型输入的高int w, h, x, y;float r_w = static_cast<float>(input_w) / src.cols;float r_h = static_cast<float>(input_h) / src.rows;if (r_h > r_w) {w = input_w;h = std::round(r_w * src.rows); // 避免浮点数误差x = 0;y = (input_h - h) / 2;scale = r_w;} else {w = std::round(r_h * src.cols);h = input_h;x = (input_w - w) / 2;y = 0;scale = r_h;}x_pad = x;y_pad = y;cv::Mat re, out;if (src.channels() == 3) {re = cv::Mat(h, w, CV_8UC3);cv::resize(src, re, re.size(), 0, 0, cv::INTER_LINEAR);out = cv::Mat(input_h, input_w, CV_8UC3, cv::Scalar(114, 114, 114));} else if (src.channels() == 1) {re = cv::Mat(h, w, CV_8UC1);cv::resize(src, re, re.size(), 0, 0, cv::INTER_LINEAR);out = cv::Mat(input_h, input_w, CV_8UC1, cv::Scalar(114));} else {return cv::Mat(); // 返回空矩阵,避免错误}// 将缩放后的图像复制到填充后的图像re.copyTo(out(cv::Rect(x, y, re.cols, re.rows)));return out;
}cv::Rect V5::get_rect(cv::Mat &img, cv::Rect bbox)
{float l, r, t, b;float r_w = modelInputSize.width / (img.cols * 1.0);float r_h = modelInputSize.height / (img.rows * 1.0);if (r_h > r_w) {l = bbox.x;r = bbox.x + bbox.width;t = bbox.y - (modelInputSize.height - r_w * img.rows) / 2;b = bbox.y + bbox.height - (modelInputSize.height - r_w * img.rows) / 2;l = l / r_w;r = r / r_w;t = t / r_w;b = b / r_w;} else {l = bbox.x - (modelInputSize.width - r_h * img.cols) / 2;r = bbox.x + bbox.width - (modelInputSize.width - r_h * img.cols) / 2;t = bbox.y;b = bbox.y + bbox.height;l = l / r_h;r = r / r_h;t = t / r_h;b = b / r_h;l = l < 0 ? 0 : l;t = r < 0 ? 0 : t;}return cv::Rect(round(l), round(t), round(r - l), round(b - t));
}
结果展示: