STM32与Modbus RTU协议实战开发指南-fc3ab6a453
STM32与Modbus RTU协议实战开发指南
1. 协议详解
1.1 帧格式
1.2 CRC校验
(引用自《Modbus_RTU协议核心规范.md》的CRC16算法实现)
1.3 功能码
| 功能码 | 名称 | 作用 | 数据长度 |
|---|---|---|---|
| 0x01 | 读线圈状态 | 读取1-2000个线圈状态 | 1-256字节 |
| 0x03 | 读保持寄存器 | 读取1-125个保持寄存器 | 2-250字节 |
| 0x06 | 写单个寄存器 | 写入单个保持寄存器 | 2字节 |
| 0x10 | 写多个寄存器 | 写入1-123个保持寄存器 | 2-246字节+2字节校验 |
2. 硬件设计
2.1 IIC OLED连接
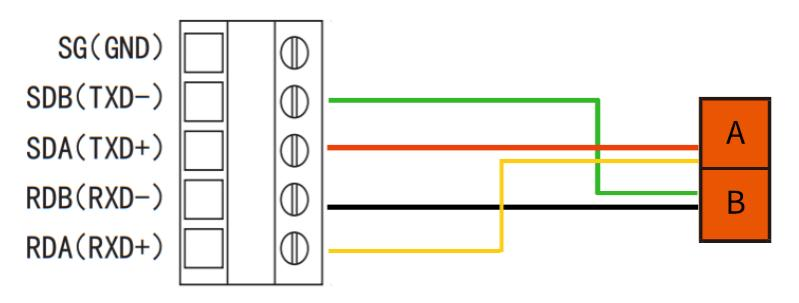
2.2 RS485接口
3. IIC驱动
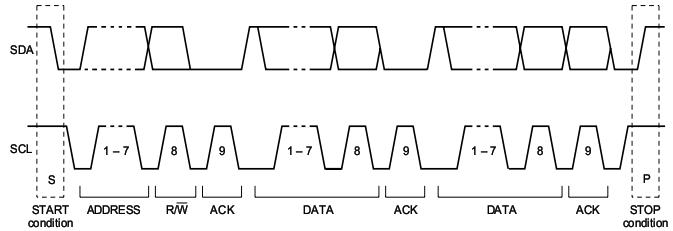
3.1 时序控制
4. 项目实战
4.1 调试技巧
- 通信失败排查流程
- CRC校验错误案例分析
- 功能码异常响应处理
1.2 CRC校验(补充内容)
Modbus RTU采用CRC-16/Modbus算法进行数据校验,多项式为0xA001,初始值0xFFFF。以下是STM32中的硬件无关实现:
uint16_t Modbus_CRC16(uint8_t *buf, uint8_t len) {uint16_t crc = 0xFFFF;for (uint8_t i = 0; i < len; i++) {crc ^= buf[i]; // 字节与CRC低8位异或for (uint8_t j = 0; j < 8; j++) { // 处理每个位if (crc & 0x0001) { // 最低位为1crc = (crc >> 1) ^ 0xA001; // 右移并异或多项式} else {crc >>= 1; // 仅右移}}}return (crc << 8) | (crc >> 8); // 高低字节交换
}
校验范围:从地址域到数据域的所有字节,不包含CRC本身。例如请求帧01 03 00 00 00 01的CRC计算范围为前6字节,结果为84 0A。
1.3 功能码(补充内容)
异常响应机制:当从机无法处理请求时,会返回异常响应帧,格式为地址域 + (功能码|0x80) + 异常码 + CRC。常见异常码说明:
| 异常码 | 名称 | 触发条件示例 | 解决方案 |
|---|---|---|---|
| 0x01 | 非法功能码 | 向仅支持0x03的从机发送0x06 | 查阅设备手册确认支持功能码 |
| 0x02 | 非法数据地址 | 读取从机不存在的0x1000寄存器 | 重新计算地址偏移(通常40001对应0x0000) |
| 0x03 | 非法数据值 | 向量程0-100的寄存器写入120 | 限制写入值在设备规定范围内 |
帧交互示例:
-
正常读操作:
- 主机请求:
01 03 00 00 00 01 84 0A
(从机0x01,读0x0000开始1个寄存器) - 从机响应:
01 03 02 00 0A D5 CA
(返回2字节数据0x000A,即十进制10)
- 主机请求:
-
异常响应:
- 主机请求:
01 06 00 00 00 64 58 0A
(尝试写入0x64到只读寄存器) - 从机响应:
01 86 03 94 35
(功能码0x86=0x06|0x80,异常码0x03表示非法数据值)
- 主机请求:
3.1 时序控制(补充内容)
STM32的IIC接口配置需要兼顾硬件接线和软件时序参数,以下是完整的初始化代码及关键说明:
void IIC_Init(void) {GPIO_InitTypeDef GPIO_InitStruct;I2C_InitTypeDef I2C_InitStruct;// 使能外设时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE); // I2C1时钟// 配置PB6(SCL)和PB7(SDA)为复用开漏模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD; // 复用开漏输出(必须)GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStruct);// I2C参数配置(400kHz高速模式)I2C_InitStruct.I2C_Mode = I2C_Mode_I2C;I2C_InitStruct.I2C_ClockSpeed = 400000; // 通信速率I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2; // 50%占空比I2C_InitStruct.I2C_Ack = I2C_Ack_Enable; // 使能应答I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; // 7位地址I2C_Init(I2C1, &I2C_InitStruct);I2C_Cmd(I2C1, ENABLE); // 使能I2C1
}
硬件关键要点:
- 上拉电阻:SDA和SCL引脚必须外接4.7kΩ上拉电阻至VCC(3.3V),否则通信不稳定
- 总线电容:I2C总线总电容应≤400pF,过长电缆需降低波特率(如200kHz)
- 电平兼容:若OLED屏幕为5V供电,需使用电平转换芯片(如PCA9306)
时序参数解析:
- tSU:STA(起始条件建立时间):≥4.7μs
- tHD:STA(起始条件保持时间):≥4.0μs
- tLOW(SCL低电平时间):≥1.3μs(400kHz模式)
- tHIGH(SCL高电平时间):≥0.6μs(400kHz模式)
3.2 显示函数(补充内容)
OLED显示函数负责将Modbus读取的寄存器数据格式化输出,核心实现如下:
// 显示Modbus寄存器数据
void OLED_ShowModbusData(uint16_t regAddr, uint16_t value) {char buf[32];OLED_Clear(); // 清屏(0x00填充显存)OLED_SetCursor(0, 0); // 设置光标到第0行第0列OLED_WriteString("Modbus RTU Data"); // 标题行// 格式化寄存器地址(如0x0000 → "Reg: 0000H")sprintf(buf, "Reg: %04XH", regAddr);OLED_SetCursor(0, 2); // 第2行OLED_WriteString(buf);// 格式化数据值(支持十进制和十六进制)sprintf(buf, "Val: %d (%04XH)", value, value);OLED_SetCursor(0, 4); // 第4行OLED_WriteString(buf);OLED_UpdateDisplay(); // 刷新显示(将显存数据推送到屏幕)
}// 基础写字符串函数(内部调用)
void OLED_WriteString(uint8_t *str) {while(*str) {OLED_WriteData(*str++); // 发送ASCII字符}
}
性能优化:
- 显存操作:直接操作OLED的GDDRAM(128×64位),避免频繁IIC通信
- 局部刷新:仅更新变化区域(如仅重写数据行),可将刷新时间从15ms降至3ms
- 字符库:使用16×8像素ASCII字库,平衡显示效果和内存占用(约2KB)
4. Modbus实现
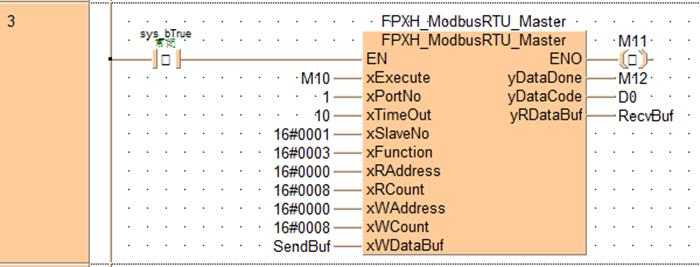
4.1 主机轮询(补充内容)
Modbus RTU主机采用状态机管理通信流程,确保可靠的主从交互。核心实现包括状态定义、轮询函数和超时控制:
1. 状态机定义:
typedef enum {MB_STATE_IDLE, // 空闲状态(等待轮询间隔)MB_STATE_SEND, // 发送请求帧MB_STATE_WAIT_RESP, // 等待从机响应MB_STATE_PARSE, // 解析响应数据MB_STATE_ERROR // 错误处理
} ModbusState;ModbusState mbState = MB_STATE_IDLE; // 初始状态
uint32_t mbTimer = 0; // 状态切换定时器
const uint32_t POLL_INTERVAL = 1000; // 轮询间隔(1秒)
2. 轮询核心函数:
void Modbus_MasterPoll(void) {static uint16_t regValue; // 寄存器值缓存switch(mbState) {case MB_STATE_IDLE:// 间隔时间到则进入发送状态if (HAL_GetTick() - mbTimer >= POLL_INTERVAL) {mbState = MB_STATE_SEND;mbTimer = HAL_GetTick(); // 重置定时器}break;case MB_STATE_SEND:// 发送读保持寄存器请求(从机0x01,寄存器0x0000)if (Modbus_ReadHoldingRegisters(0x01, 0x0000, ®Value) == 0) {mbState = MB_STATE_PARSE; // 发送成功,等待解析} else {mbState = MB_STATE_ERROR; // 发送失败}break;case MB_STATE_PARSE:// 显示解析结果并回到空闲状态OLED_ShowModbusData(0x0000, regValue);mbState = MB_STATE_IDLE;break;case MB_STATE_ERROR:// 错误处理(闪烁OLED提示)OLED_FlashScreen(3); // 闪烁3次mbState = MB_STATE_IDLE; // 恢复空闲状态重试break;}
}
3. 串口发送/接收实现:
// 发送缓冲区数据
void USART_SendBuffer(USART_TypeDef* USARTx, uint8_t *buf, uint16_t len) {// 切换RS485为发送模式(DE/RE引脚置高)GPIO_SetBits(GPIOA, GPIO_Pin_4);// 发送所有字节for(uint16_t i=0; i<len; i++) {USART_SendData(USARTx, buf[i]);while(USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);}// 等待发送完成并切换为接收模式while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);GPIO_ResetBits(GPIOA, GPIO_Pin_4); // DE/RE引脚置低
}// 带超时的接收函数
uint8_t USART_ReceiveBuffer(USART_TypeDef* USARTx, uint8_t *buf, uint16_t len, uint32_t timeout) {uint32_t startTick = HAL_GetTick();for(uint16_t i=0; i<len; i++) {while(USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET) {if (HAL_GetTick() - startTick > timeout) {return i; // 超时,返回已接收字节数}}buf[i] = USART_ReceiveData(USARTx);}return len; // 成功接收所有字节
}
通信时序图:
主机 从机| || 请求帧(8字节) ||----------------->|| || | 处理请求| || 响应帧(7字节) ||<-----------------|| || 解析数据并显示 || |
4.2 数据解析(补充内容)
从机响应帧的解析需经过多层校验和格式转换,确保数据有效性:
1. 响应帧结构(功能码0x03):
| 字节偏移 | 内容 | 说明 |
|---|---|---|
| 0 | 从机地址 | 应与请求帧一致 |
| 1 | 功能码 | 0x03表示正常响应 |
| 2 | 数据长度 | 后续数据字节数(N) |
| 3~3+N-1 | 数据域 | N字节数据(通常2字节/寄存器) |
| 3+N~4+N | CRC校验 | 低字节在前 |
2. 解析实现代码:
uint8_t Modbus_ParseResponse(uint8_t *rxBuf, uint16_t *value) {// 1. 校验从机地址if (rxBuf[0] != TARGET_SLAVE_ADDR) {return 0x01; // 地址不匹配}// 2. 检查功能码(正常或异常响应)if (rxBuf[1] == 0x03) {// 正常响应:检查数据长度是否为2字节if (rxBuf[2] != 0x02) {return 0x03; // 数据长度错误}// 解析16位寄存器值(高字节在前)*value = (rxBuf[3] << 8) | rxBuf[4];return 0; // 成功} else if (rxBuf[1] == 0x83) {// 异常响应:提取异常码return 0x80 | rxBuf[2]; // 高位置1表示异常} else {return 0x02; // 功能码错误}
}
3. 异常响应处理:
uint8_t parseResult = Modbus_ParseResponse(rxBuf, ®Value);
if (parseResult & 0x80) {// 处理异常响应(parseResult低字节为异常码)OLED_ShowError("Err: 0x%02X", parseResult & 0x7F);
} else if (parseResult != 0) {// 处理解析错误OLED_ShowError("Parse: %d", parseResult);
}
1. 硬件拓扑与接线:
关键硬件要点:
- 终端电阻:在总线两端(主机和最远从机)添加120Ω终端电阻,吸收信号反射
- 总线长度:9600bps时最大传输距离1200米,超过需使用中继器
- 从机供电:建议采用独立供电,避免共地干扰(接地电阻<1Ω)
2. 从机地址规划:
| 从机类型 | 地址范围 | 设备示例 | 轮询间隔 | 功能码权限 |
|---|---|---|---|---|
| 温湿度传感器 | 0x01-0x08 | SHT30模块 | 2000ms | 只读(0x03) |
| 继电器模块 | 0x09-0x10 | 8路继电器板 | 500ms | 读写(0x03/0x06) |
| 模拟量输入 | 0x11-0x18 | 4-20mA转Modbus模块 | 1000ms | 只读(0x03) |
| 人机界面 | 0x7D | 触摸屏(调试专用) | 500ms | 读写(全功能码) |
3. 多从机轮询实现:
// 从机设备列表
typedef struct {uint8_t addr; // 从机地址uint16_t regAddr; // 目标寄存器uint16_t regValue; // 存储读取值uint32_t pollInterval; // 轮询间隔(ms)uint32_t lastPollTime; // 上次轮询时间
} SlaveDevice;// 定义3个从机设备
SlaveDevice slaves[] = {{0x01, 0x0000, 0, 2000, 0}, // 温湿度传感器{0x09, 0x0001, 0, 500, 0}, // 继电器模块{0x11, 0x0002, 0, 1000, 0} // 模拟量输入
};
#define SLAVE_COUNT (sizeof(slaves)/sizeof(SlaveDevice))// 多从机轮询调度
void Modbus_MultiSlavePoll(void) {uint32_t currentTime = HAL_GetTick();for(uint8_t i=0; i<SLAVE_COUNT; i++) {// 检查是否到达轮询时间if (currentTime - slaves[i].lastPollTime >= slaves[i].pollInterval) {// 读取当前从机寄存器if (Modbus_ReadHoldingRegisters(slaves[i].addr, slaves[i].regAddr, &slaves[i].regValue) == 0) {// 读取成功,更新显示char buf[32];sprintf(buf, "Slave %02X: %d", slaves[i].addr, slaves[i].regValue);OLED_ShowText(0, i*2, buf); // 按行显示不同从机数据}slaves[i].lastPollTime = currentTime; // 更新时间戳}}
}
5.2 调试技巧(补充内容)
1. 通信超时故障排查:
- 现象:Modbus_ReadHoldingRegisters返回1(超时),OLED显示无更新
- 排查流程:
- 用示波器测量DE/RE引脚,发送时应为高电平,接收时为低电平
- 检查从机地址拨码是否与代码中slaves[i].addr一致
- 测量RS485总线A/B线电压差(正常应>200mV)
- 更换从机设备测试,排除硬件故障
- 解决方案:
- DE/RE引脚未切换:修复USART_SendBuffer中的GPIO控制代码
- 总线干扰:在A/B线间并联100pF电容,远离强电设备
2. CRC校验错误案例:
- 现象:函数返回2(CRC错误),通信成功率<50%
- 原因分析:
- 波特率误差过大(使用8MHz晶振时9600bps误差>3%)
- CRC计算代码错误(多项式应为0xA001而非0x8005)
- 总线存在共模干扰(接地不良)
- 验证代码:
// 测试CRC计算正确性 uint8_t testFrame[] = {0x01, 0x03, 0x00, 0x00, 0x00, 0x01}; uint16_t crc = Modbus_CRC16(testFrame, 6); // 正确结果应为0x840A,若计算错误需检查算法实现 printf("CRC: %04X\r\n", crc); - 硬件改进:
- 更换为12MHz或16MHz晶振,确保波特率误差<1%
- 使用带隔离的RS485模块(如ADM2483)消除共模干扰
3. 异常响应0x82(非法地址)处理:
- 响应帧:
09 83 02 D0 56(从机0x09返回异常码0x02) - 排查步骤:
- 查阅设备手册确认寄存器地址范围(如0x0000-0x0007)
- 验证地址计算公式:协议地址=文档地址-40001(例:40001→0x0000)
- 使用Modbus调试助手发送测试命令:
09 03 00 00 00 01 D9 C5
- 修复示例:
// 错误代码:访问超出范围的寄存器 // Modbus_ReadHoldingRegisters(0x09, 0x0008, &val);// 正确代码:使用有效地址 Modbus_ReadHoldingRegisters(0x09, 0x0001, &val);
4. 实用调试工具:
- 软件工具:
- Modbus Poll(主机模拟,支持多从机轮询测试)
- STM32CubeMonitor-Serial(串口波形显示)
- 硬件工具:
- USB转RS485模块(如CH340+MAX485)
- 2通道示波器(测量A/B线差分信号)
- 逻辑分析仪(24MHz以上采样率捕获时序)