[数据结构——Lesson14.快速排序]
目录
前言
学习目标
1.分治策略(Divide and Conquer)
1.1分治策略的核心步骤
1. 分解(Divide):拆分大问题为子问题
2. 解决(Conquer):递归求解子问题
3.合并(Combine):合并子问题结果
1.2分治策略的适用场景
1.3分治策略的优缺点
优点:
缺点:
2.快速排序(Quick Sort)
2.1算法思想:
2.2算法步骤
2.3方法解析
(1)Hoare法
(2)挖坑法
(3)前后指针法
3.复杂度分析
算法优化
① 改变基准值
②三指针分划区间
一、核心定义:3 个指针的初始定位
二、执行流程:cur 遍历与指针调整
三、最终结果:3 个区间的明确划分
③区间优化
非递归实现
前言
上节内容我们讲到了两个排序算法——冒泡排序和选择排序[数据结构——Lesson13.冒泡与选择排序],这一节我们将详细讲解设计巧妙而且使用非常广泛的排序算法——快速排序。
学习目标
- 什么是分治策略
- 快速排序的掌握
1.分治策略(Divide and Conquer)
在学习快排之前,我们先了解一下什么是分治策略?
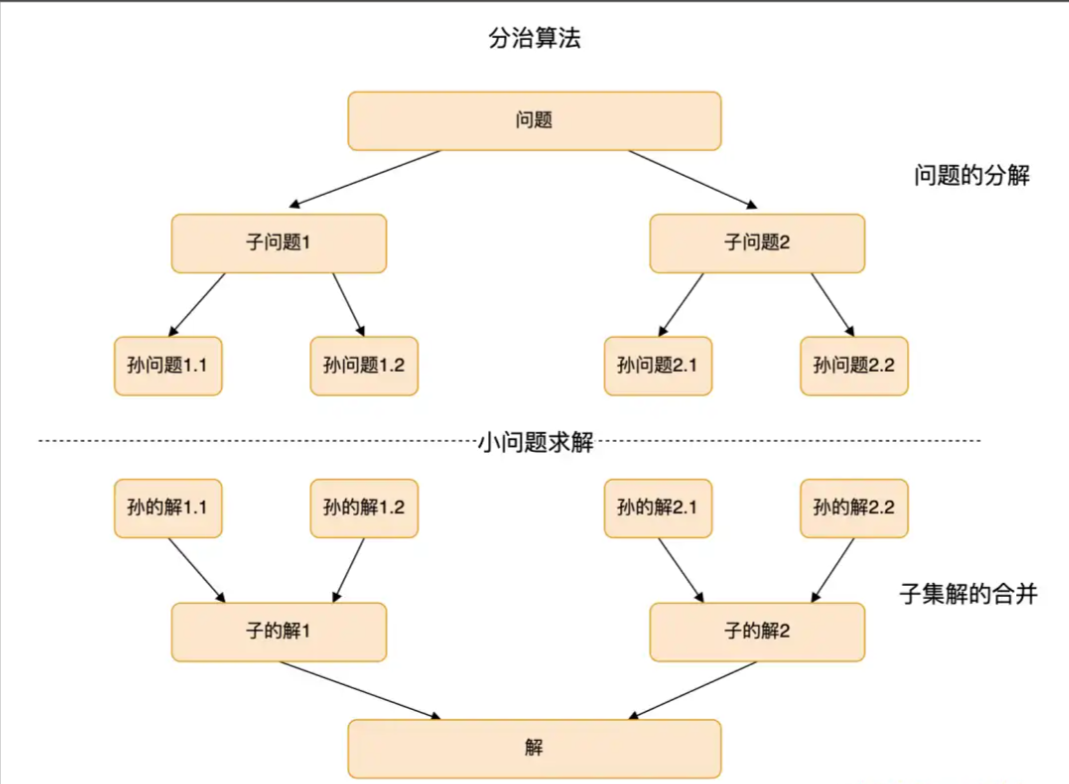
分治策略(Divide and Conquer)是一种经典的算法设计思想,核心逻辑可概括为 “分而治之”—— 将复杂的大问题拆解为多个结构相同、规模更小的子问题,通过解决子问题,最终合并子问题的结果得到原问题的解。它是高效算法(如快速排序、归并排序、二分查找等)的核心思想之一,尤其适用于解决规模庞大、直接求解困难的问题。
1.1分治策略的核心步骤
分治策略的执行过程通常分为 3 个关键阶段,且这 3 个阶段会通过递归(或迭代)重复执行,直到子问题足够简单可直接求解:
1. 分解(Divide):拆分大问题为子问题
将原问题(规模为
n)按照某种规则拆分为 k个 规模更小、结构与原问题一致 的子问题(例如将规模n拆分为2个规模n/2的子问题)。
- 关键要求:子问题需与原问题 “同构”(即解决逻辑相同),且拆分后子问题之间 相互独立(无依赖关系,可并行求解)。
- 示例:对数组
[5,3,7,1,4,8,2]用分治排序时,可拆分为[5,3,7]和[1,4,8,2]两个子数组(子问题仍是 “数组排序”,且两个子数组独立)。2. 解决(Conquer):递归求解子问题
递归地对每个子问题进行求解:
- 若子问题规模足够小(达到 “基线条件”,如子数组长度为
1),则直接得到解(单个元素默认有序,无需额外计算);- 若子问题仍较复杂,则继续重复 “分解→解决” 的过程,直到子问题满足基线条件。
- 示例:上述子数组
[5,3,7]继续拆分为[5,3]和[7],其中[7]满足基线条件(直接有序),[5,3]再拆分为[5]和[3](均满足基线条件)。3.合并(Combine):合并子问题结果
将所有子问题的解合并,得到原问题的最终解。
- 合并是分治策略的 “关键收尾步骤”,不同问题的合并逻辑差异较大(部分简单问题可省略合并,如快速排序)。
- 示例:归并排序中,需将两个有序子数组(如
[3,5]和[7])合并为一个有序数组[3,5,7];而快速排序中,由于子问题的解(有序子区间)本身已在原数组中 “原位有序”,无需额外合并操作。
1.2分治策略的适用场景
并非所有问题都适合分治策略,需满足以下 4 个条件:
- 问题可拆分:原问题能拆分为多个规模更小的子问题,且子问题结构与原问题一致;
- 子问题独立:子问题之间无依赖,求解一个子问题时无需依赖其他子问题的中间结果;
- 基线条件存在:子问题规模缩小到一定程度后,可直接求解(无需继续拆分);
- 结果可合并:子问题的解能通过合理逻辑合并为原问题的解。
典型应用场景:
- 排序算法:快速排序(拆分后无需合并)、归并排序(拆分后需合并);
- 查找算法:二分查找(拆分后仅需求解一个子问题);
- 数值计算:大整数乘法、矩阵乘法(Strassen 算法);
- 组合问题:汉诺塔问题、逆序对计数。
1.3分治策略的优缺点
优点:
- 降低问题复杂度:将 “无法直接解决的大问题” 拆解为 “可轻松解决的小问题”,大幅降低求解难度;
- 高效利用资源:子问题独立的特性使其支持并行计算(如多线程求解不同子问题);
- 时间复杂度优化:多数分治算法的时间复杂度为
O(NlogN)(如快速排序、归并排序),远优于暴力算法的O(N²)。缺点:
- 空间开销较高:递归实现的分治算法需额外的 “递归调用栈” 空间(如快速排序最坏情况空间复杂度
O(N));- 合并逻辑复杂:部分问题的合并步骤难度高、开销大(如归并排序的合并需额外数组存储临时结果);
- 不适合小规模问题:递归的函数调用 / 返回开销,可能导致分治算法在小规模问题上效率低于简单算法(如快速排序优化中,子数组长度较小时改用插入排序)。
2.快速排序(Quick Sort)
2.1算法思想:
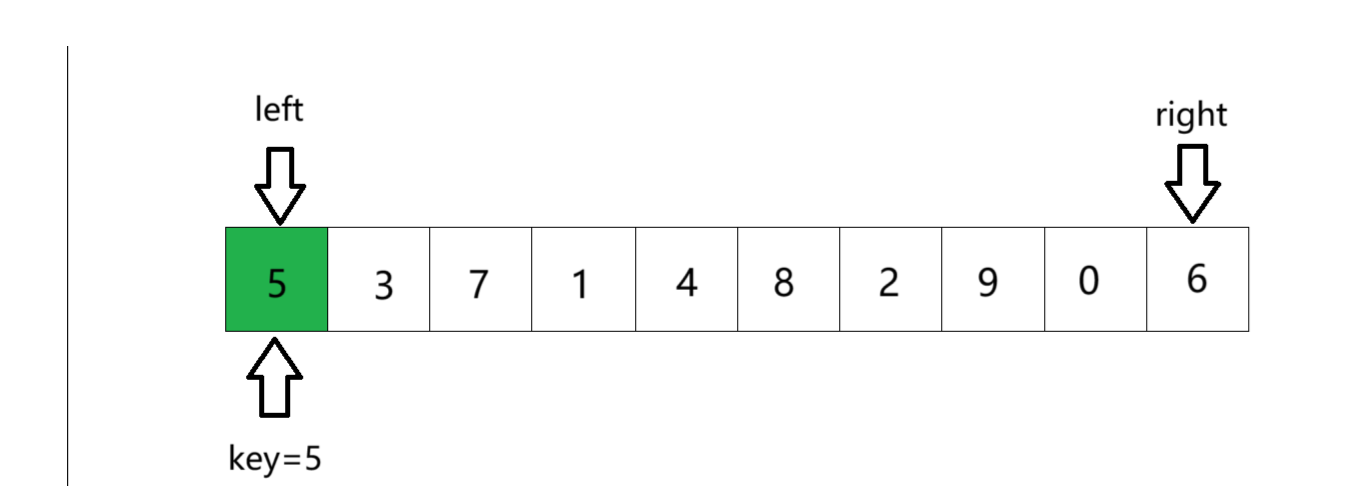
快速排序采用分治策略,通过选择一个基准值,将待排序数据分割为两部分,使得左边部分数据都小于右边部分数据。接着分别对这两部分数据递归进行快速排序,直至整个数据有序。例如对数组 [5, 3, 7, 1, 4, 8, 2, 9, 6, 0] 排序,选择 5 作为基准值,一趟排序后数组分为 [3, 1, 4, 2, 0] 和 [7, 8, 9, 6] 两部分,再分别对这两部分递归排序,最终实现整个数组有序。
2.2算法步骤
- Hoare 法:
①设定 left 和 right 指针分别指向数组首尾,选择数组首元素为基准 key;
②right 从右往左找比 key 小的数,left 从左往右找比 key 大的数,找到后交换 left 与 right 下标对应的值,重复直至 right≥left;
③之后交换 key 与 left 或 right 对应的值,记录该位置为 mid,划分数组;
④对 [left, mid - 1] 和 [mid + 1, right] 子数组重复上述过程,直至数组排序完成。
- 挖坑法:
①设置 left 和 right 指针分别指向数组两端,选取数组首元素为基准值 key 并设起始位置为坑;
②right 从右往左找比 key 小的值放入坑位,形成新坑,left 从左往右找比 key 大的值放入坑位,更新坑位;
③left 与 right 相遇时,将 key 放入最后一个坑,记录位置为 mid;
④划分区间 [left,mid - 1] 与 [mid + 1,right] 重复上述步骤,直至不能划分。
- 前后指针法:
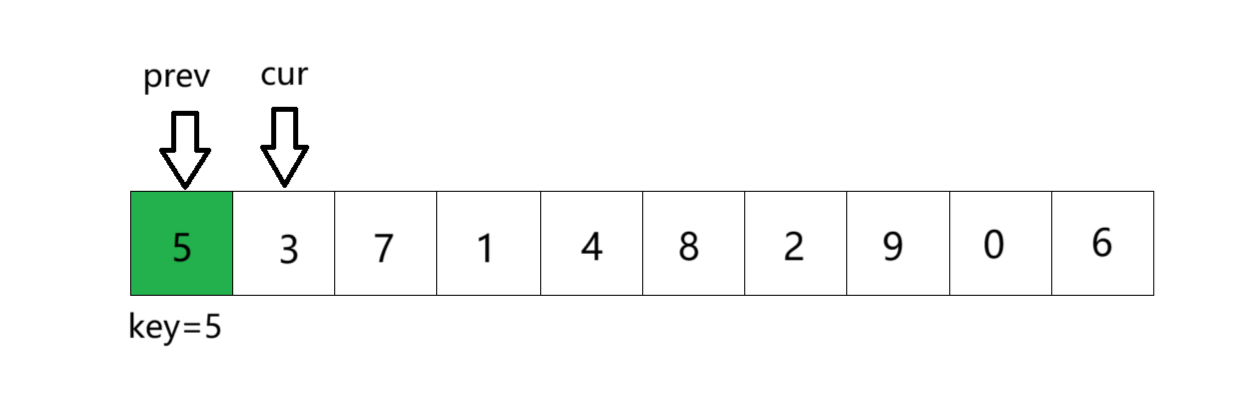
①将数组第一个元素作为 key 基准值,定义前指针 prev 指向第一个数,后指针 cur 指向第二个数;
②cur 从左往右找比 key 小的值,找到后 ++prev,交换 prev 与 cur 指向的值,cur 继续遍历;
③cur 遍历完后,交换 prev 指向的值与 key,记录此时位置为 mid;
④划分区间 [left,mid - 1] 与 [mid + 1,right] 重复上述步骤,直至不能划分。
稍安勿躁,接下来我们一个一个介绍
2.3方法解析
(1)Hoare法
①设定 left 和 right 指针分别指向数组首尾,选择数组首元素为基准 key;
②right 从右往左找比 key 小的数,left 从左往右找比 key 大的数,找到后交换 left 与 right 下标对应的值,重复直至 right≥left;
③之后交换 key 与 left 或 right 对应的值,记录该位置为 mid,划分数组;
④对 [left, mid - 1] 和 [mid + 1, right] 子数组重复上述过程,直至数组排序完成。
下面我们来看个例子:
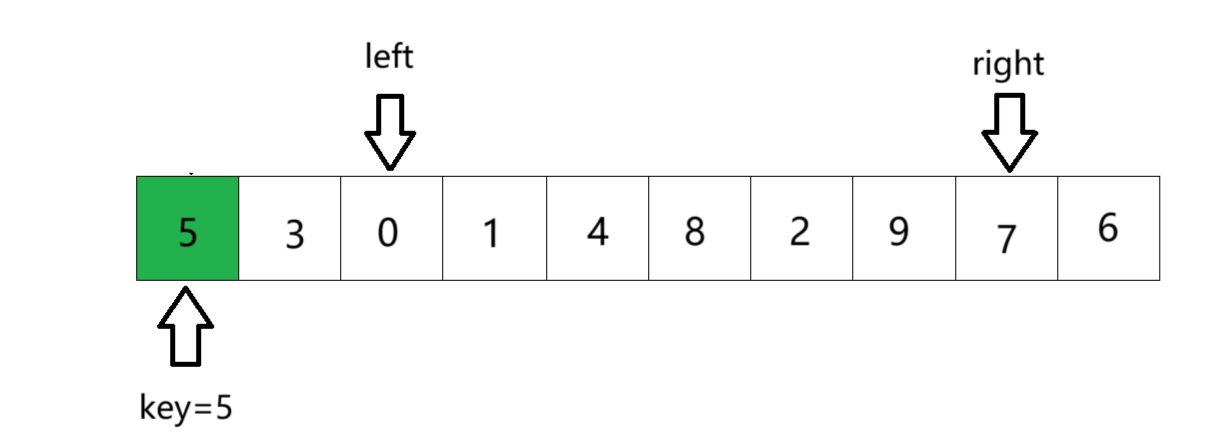
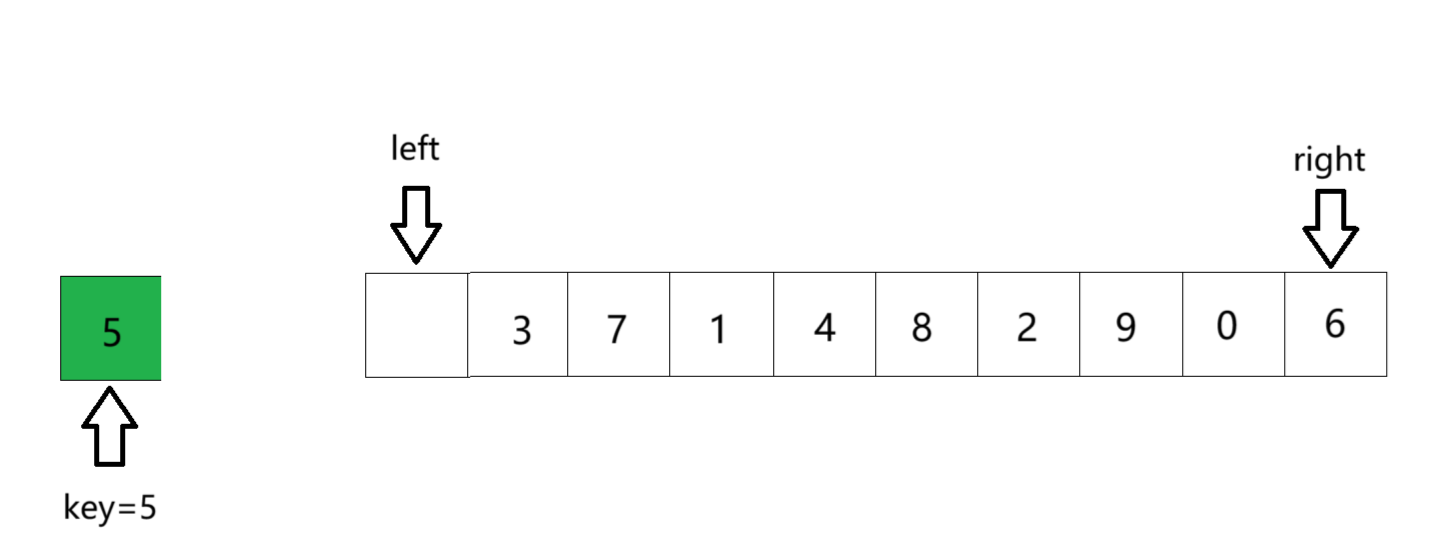
① 起始状态,key为数组的起始位置,left在起始位置,right在末尾。
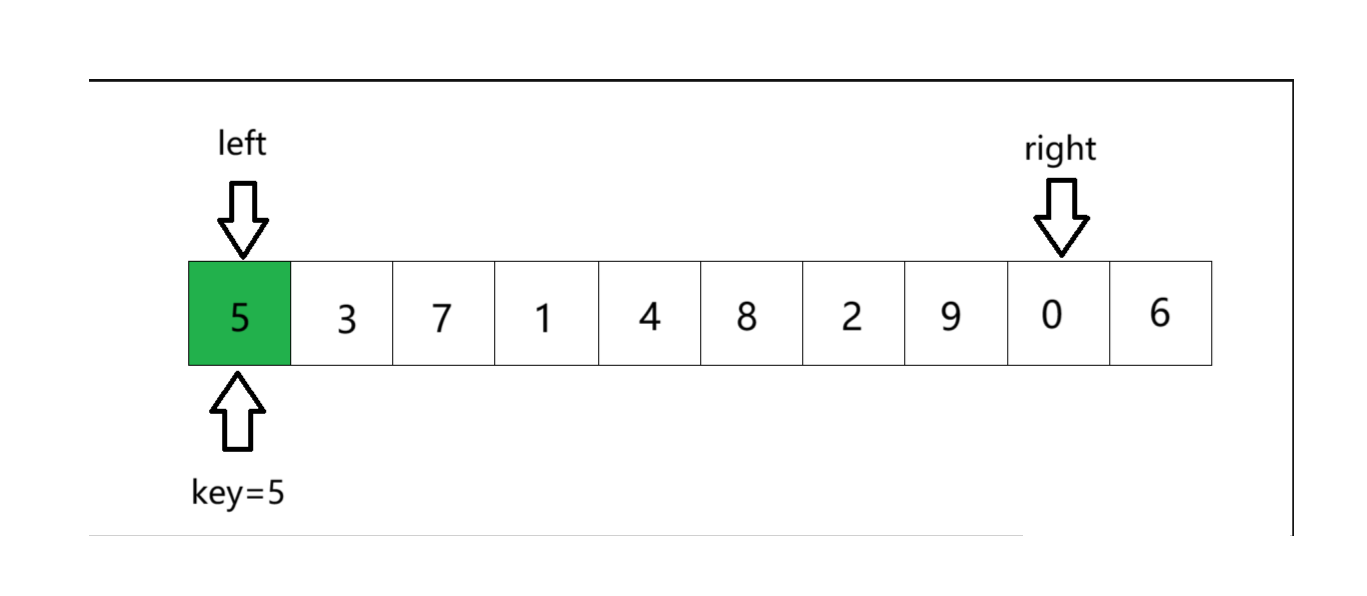
② right先出发(必须!!!),寻找比key小的数字。找到则停下。
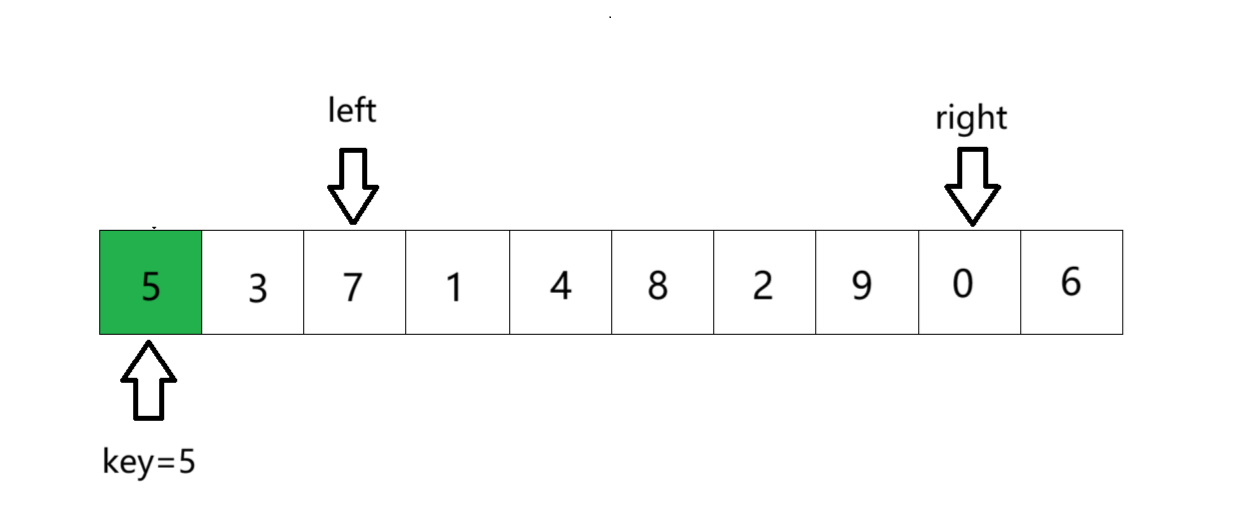
③left出发,寻找比key大的数字。找到则停下。
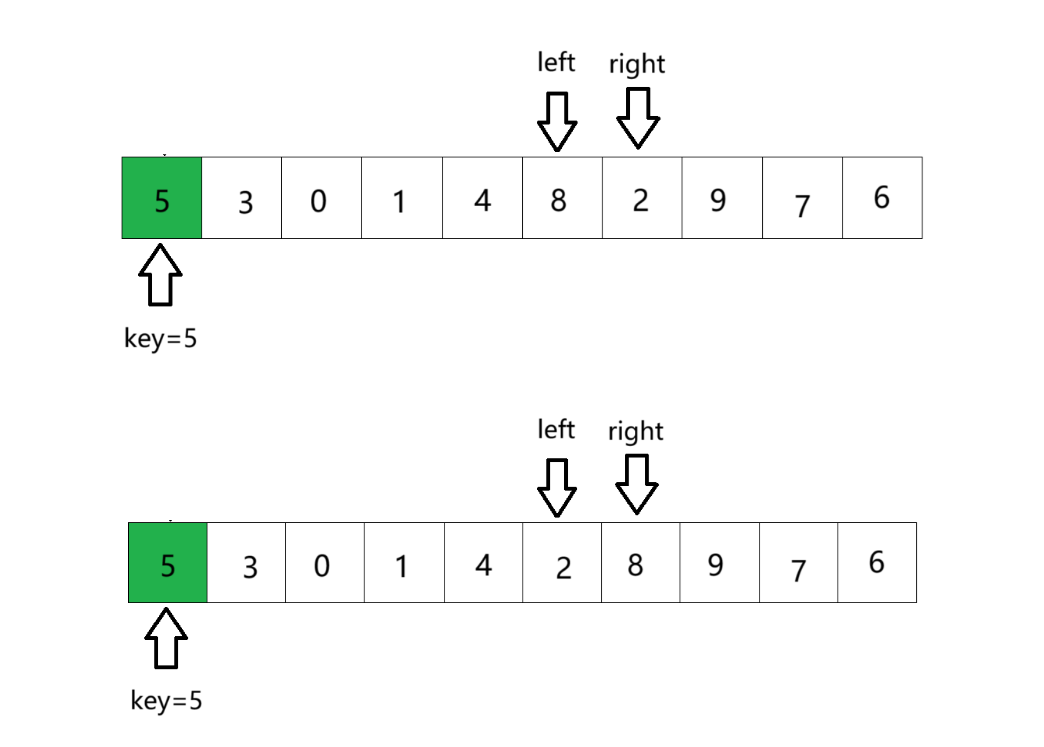
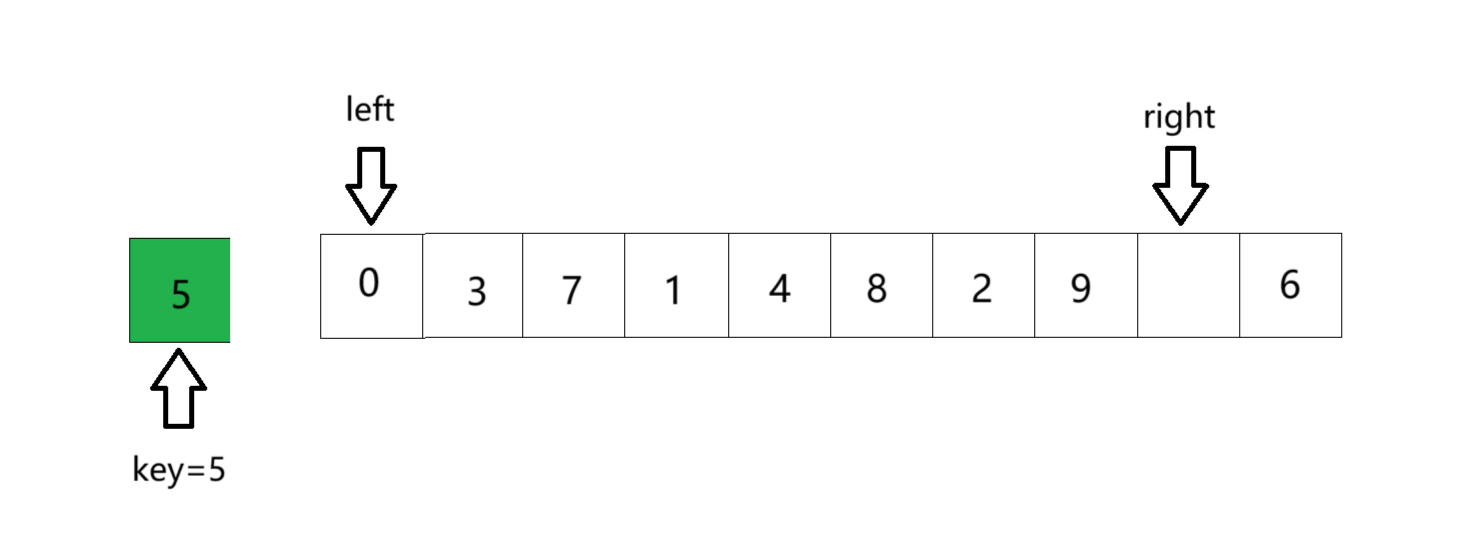
④ 交换left和right的数字。
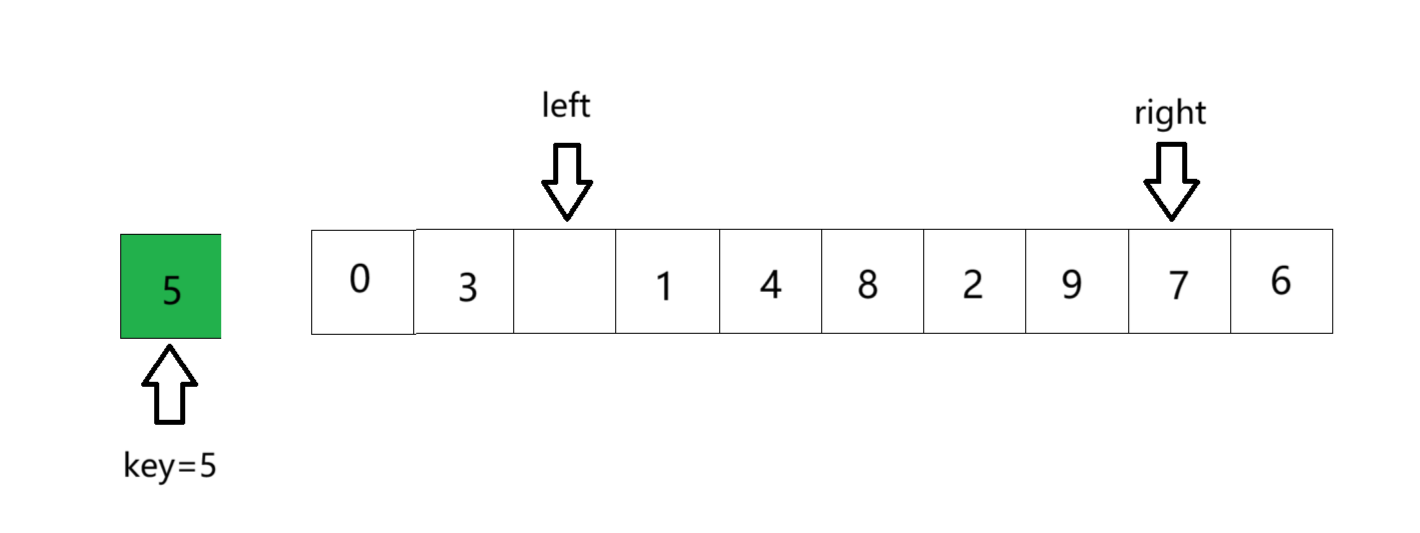
⑤ 接着走,right找比key大的数,left找比key小的数,交换。
⑥ right接着走,遇到left,此时指向同一位置。
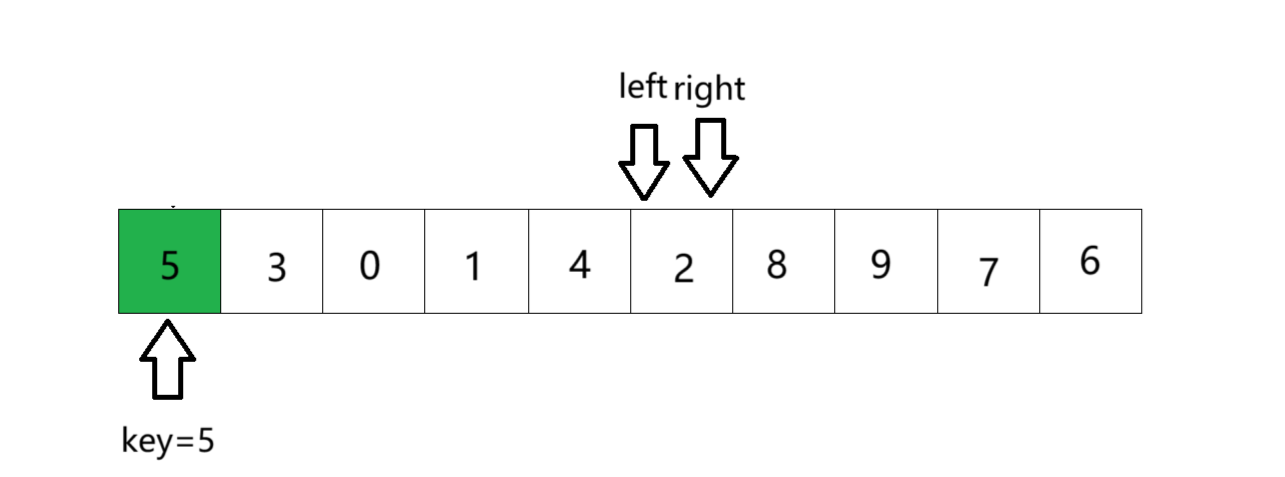
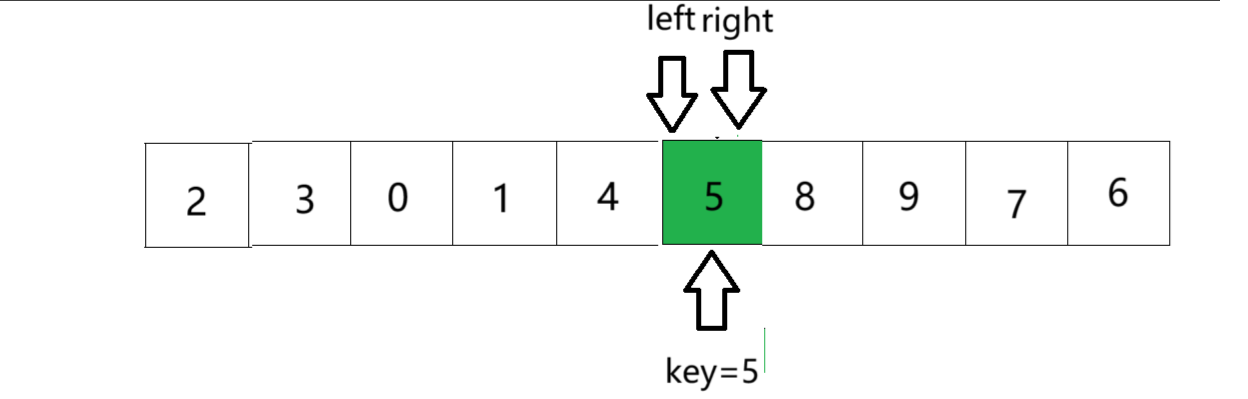
⑦ 将left与right指向的数与key进行交换,则单趟排序就完成了,最后将基准值的下标返回给函数调用者
动图演示:
思考:为什么一定要让right比left先走呢❓❓❓
答:保证相遇位置比key小
- right 未先遇到 left 的情况:right 从右向左遍历,会先找到一个比 key 小的元素并停下来,然后 left 从左向右遍历,找到比 key 大的元素后,两者交换位置。接着 right 继续向左走,left 继续向右走,重复上述过程。最终 left 向右靠近并与 right 相遇,由于 right 是停在比 key 小的值上,所以相遇位置是比 key 小的位置。
- right 先遇到 left 的情况:left 先找到比 key 大的元素停下来,此时 right 与 left 进行交换,交换后 left 指向的值比 key 小。然后 right 继续向左走,可能会直接遇到 left,此时相遇位置同样比 key 小。
若选取数组右边的第一个数作为基准值 key,则通常让 left 指针先走,这样能保证相遇位置比 key 大。
代码实现
// 交换函数
void swap(int* p1, int* p2)
{int tmp = *p1;*p1 = *p2;*p2 = tmp;
}int PartSort1(int* arr, int begin, int end)
{int left = begin;int right = end;int keyi = begin;// 左指针小于右指针,循环继续while (left < right){while (left < right && arr[right] >= arr[keyi])//寻找比key小的值{right--;}while (left < right && arr[left] <= arr[keyi])//寻找比key大的值{left++;}swap(&arr[left], &arr[right]);}int mid = left;swap(&arr[keyi], &arr[mid]);return mid;
}void QuickSort(int* arr, int left, int right)
{if (left >= right){return;}// 获取中间值int mid = PartSort1(arr, left, right);// 递归地对基准值左边的子数组进行快速排序 QuickSort(arr, left, mid - 1);// 递归地对基准值右边的子数组进行快速排序 QuickSort(arr, mid + 1, right);
}(2)挖坑法
这种方法通过选择一个基准值(key),通常是数组的第一个元素,然后将数组分为两部分:一部分包含所有小于基准值的元素,另一部分包含所有大于基准值的元素。基准值最终位于这两部分的中间。
①设置 left 和 right 指针分别指向数组两端,选取数组首元素为基准值 key 并设起始位置为坑;
②right 从右往左找比 key 小的值放入坑位,形成新坑,left 从左往右找比 key 大的值放入坑位,更新坑位;
③left 与 right 相遇时,将 key 放入最后一个坑,记录位置为 mid;
④划分区间 [left,mid - 1] 与 [mid + 1,right] 重复上述步骤,直至不能划分。
下面我们来看个例子:
① 先定义变量key,存储数组第一个数作为key,此时left指向的位置就是坑。
② right开始找小于key的数, 找到后停止,将right位置的数放进坑里,此时right位置作为新的坑。
③ left行动寻找比key大的数,找到后停止,并将值放进坑里,此时left位置作为新坑。
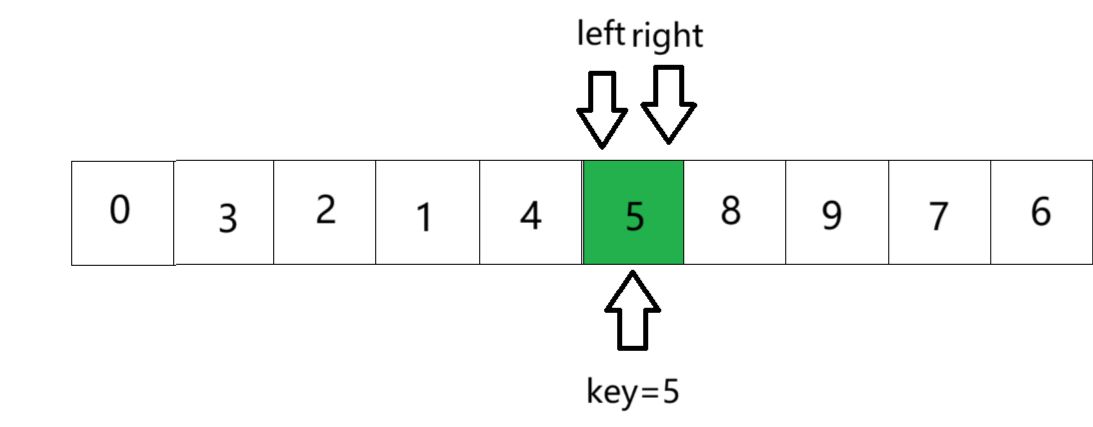
④ 以此循环,直到二者相遇。
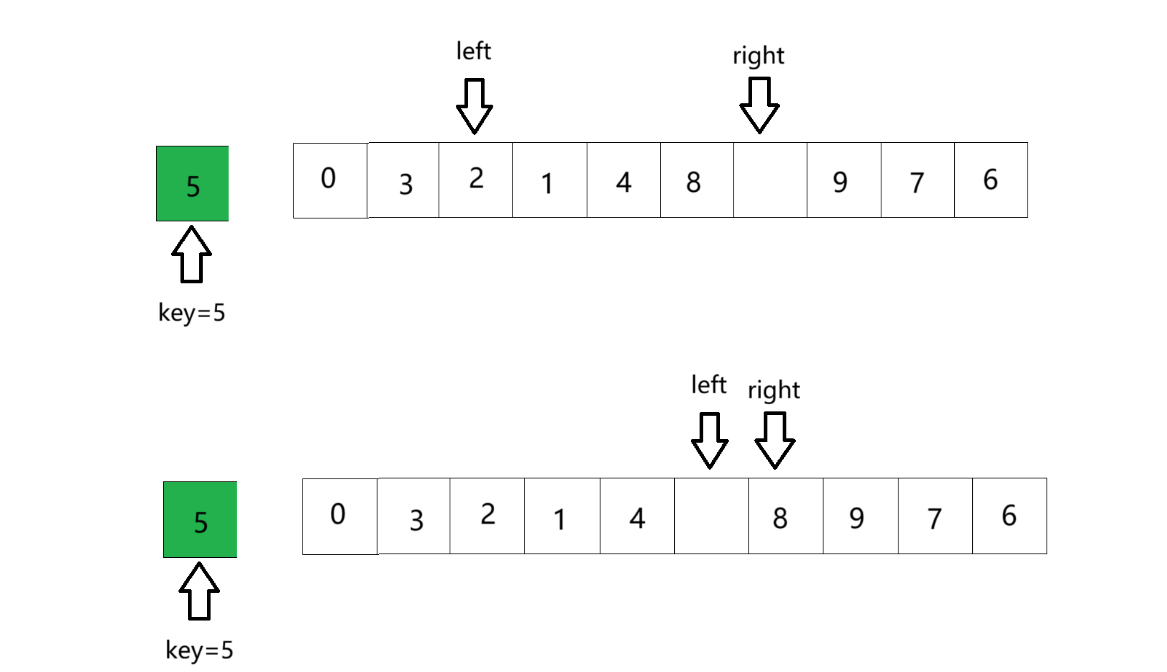
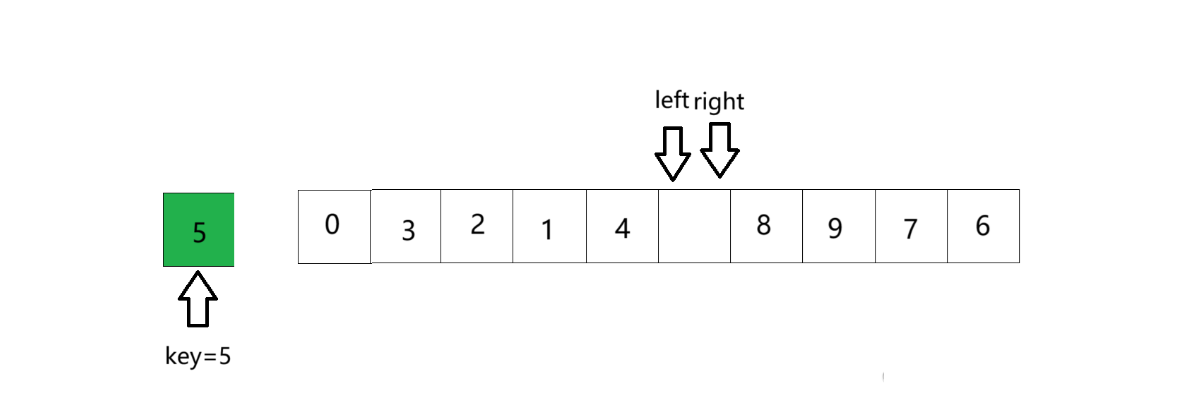
⑤ key值放到坑中,排序完毕,将key值下标返回。
动图演示
代码实现
int PartSort2(int* arr, int begin, int end)
{int left = begin, right = end;int hole = begin; // 记录当前需要填充的坑位(hole)int key = arr[left]; // 选取最左边的元素作为基准(key)while (left < right){// 从右向左扫描,找到第一个小于等于key的元素while (left < right && arr[right] >= key){right--;}// 将这个小于等于key的元素放到hole位置 arr[hole] = arr[right];hole = right; // 更新hole的位置// 从左向右扫描,找到第一个大于key的元素while (left < right && arr[left] <= key){left++;}// 将这个大于key的元素放到hole位置 arr[hole] = arr[left];hole = left; // 更新hole的位置 }// 循环结束时,left和right相遇,将基准元素放到正确的位置 arr[hole] = key;return hole; // 返回基准元素的位置
}
void QuickSort(int* arr, int left, int right)
{if (left >= right){return;}int mid = PartSort2(arr, left, right);//单趟排序// 递归地对基准元素左边的子数组进行快速排序 QuickSort(arr, left, mid - 1);// 递归地对基准元素右边的子数组进行快速排序 QuickSort(arr, mid + 1, right);
}(3)前后指针法
①将数组第一个元素作为 key 基准值,定义前指针 prev 指向第一个数,后指针 cur 指向第二个数;
②cur 从左往右找比 key 小的值,找到后 ++prev,交换 prev 与 cur 指向的值,cur 继续遍历;
③cur 遍历完后,交换 prev 指向的值与 key,记录此时位置为 mid;
④划分区间 [left,mid - 1] 与 [mid + 1,right] 重复上述步骤,直至不能划分。
来看个例子:
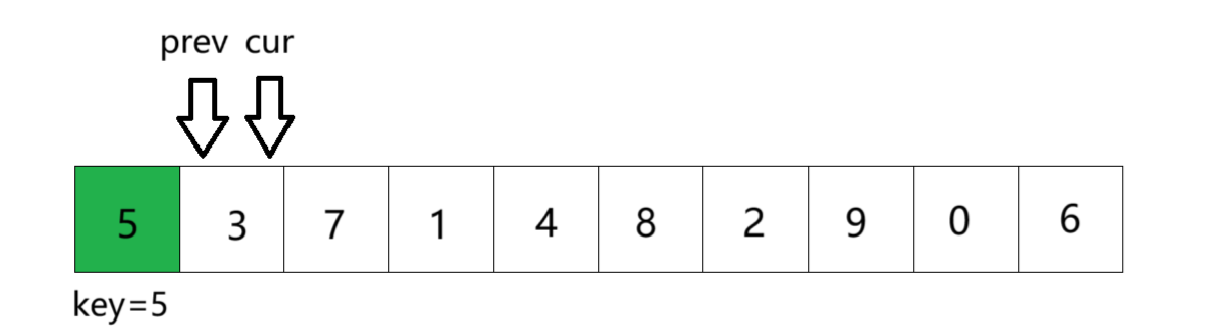
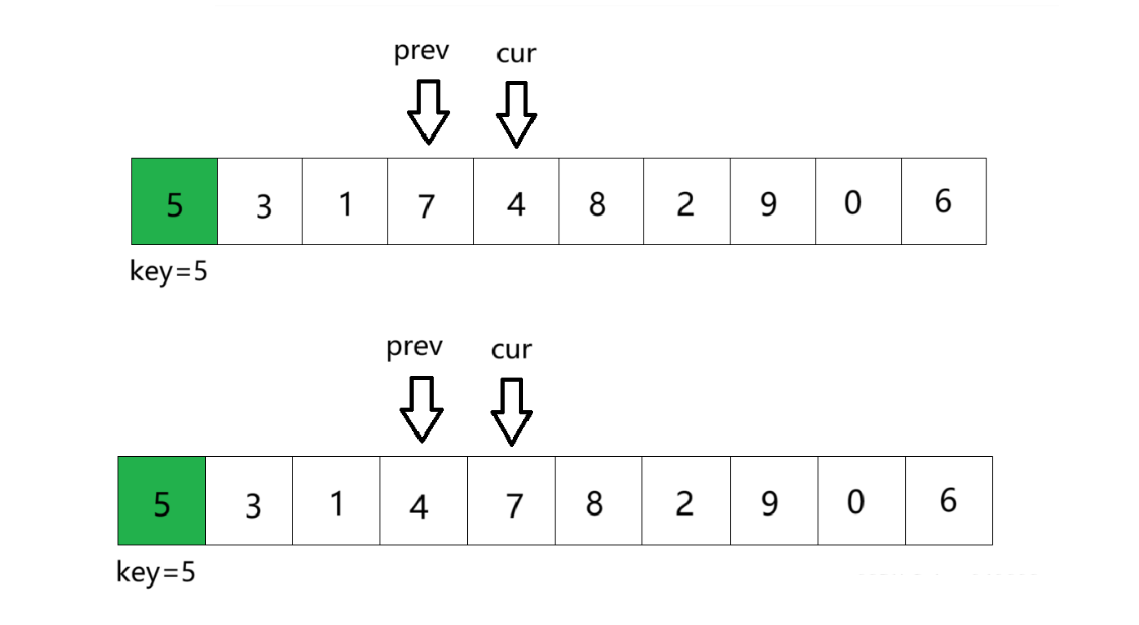
①将数组第一个元素作为key基准值,定义前指针prev指向第一个数,后指针cur指向第二个数。cur从左往右依次遍历找key小的值。此时cur位置的数比key基准值小,所以prev加一后与cur位置的数交换,由于此时prev+1 == cur,所以交换后没有变化
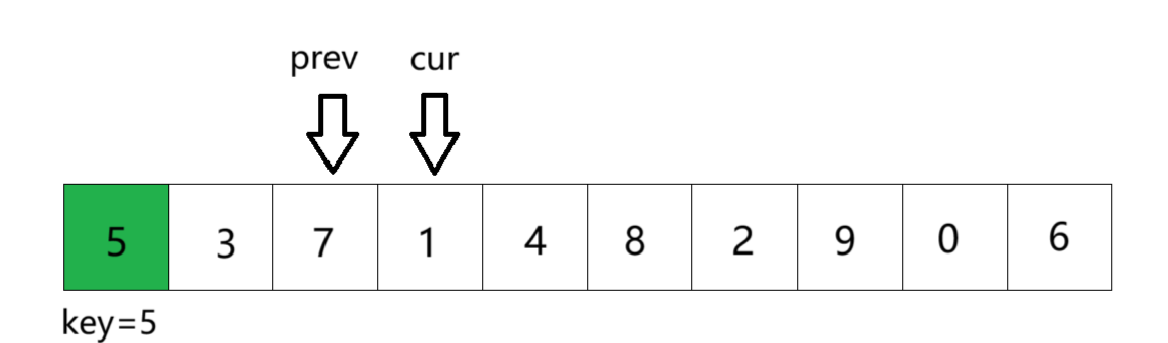
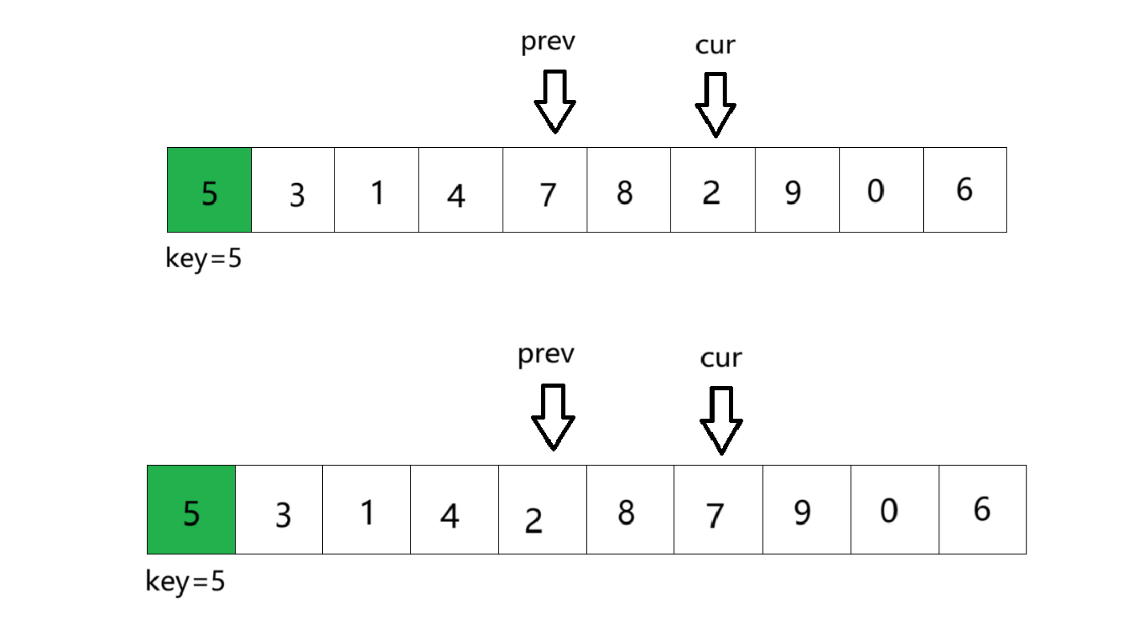
②cur继续走,找到比key小的数。找到后prev加一,交换二者的数。
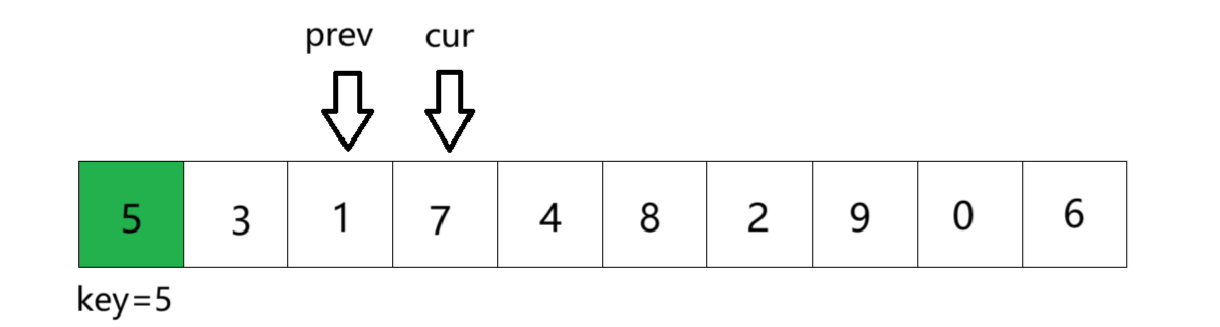
③重复以上步骤。
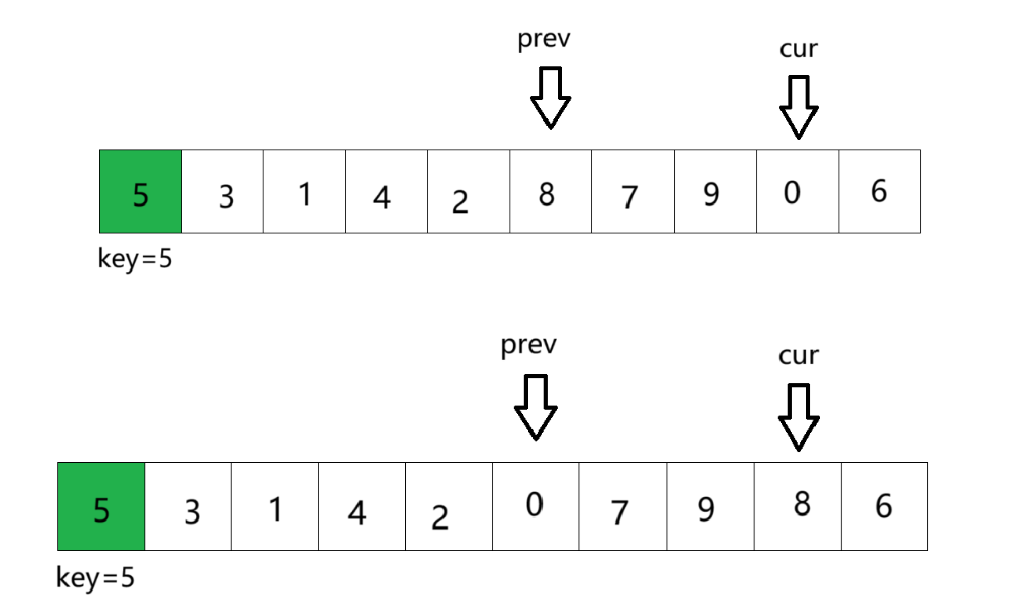
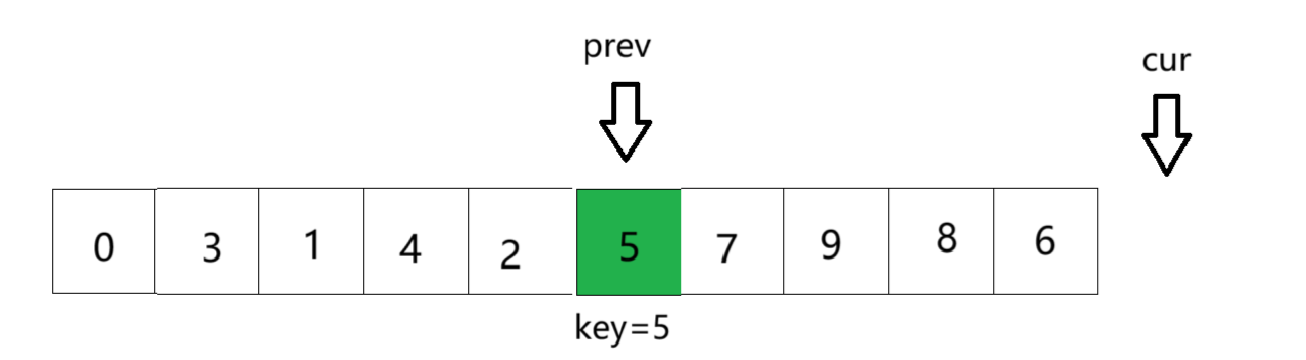
④cur遍历完数组,将prev与key交换数值,完成排序,并将key下标返回
代码实现
void Swap(int* p1, int* p2)
{int tmp = *p1;*p1 = *p2;*p2 = tmp;
}int PartSort3(int* arr, int begin, int end)
{int prev = begin;int cur = begin + 1;int keyi = begin; // 基准元素的索引while (cur <= end) // 遍历整个区间 {if (arr[cur] < arr[keyi])//小于则交换{// 将小于基准的元素与prev+1位置的元素交换,并递增prevSwap(&arr[++prev], &arr[cur]);}cur++;}Swap(&arr[prev], &arr[keyi]);// 返回基准元素的最终位置return prev;
}
void QuickSort(int* arr, int left, int right)
{if (left >= right)//不能划分{return;}int mid = PartSort3(arr, left, right);//单趟排序// 递归排序基准元素左边的子数组 QuickSort(arr, left, mid - 1);// 递归排序基准元素右边的子数组 QuickSort(arr, mid + 1, right);
}3.复杂度分析
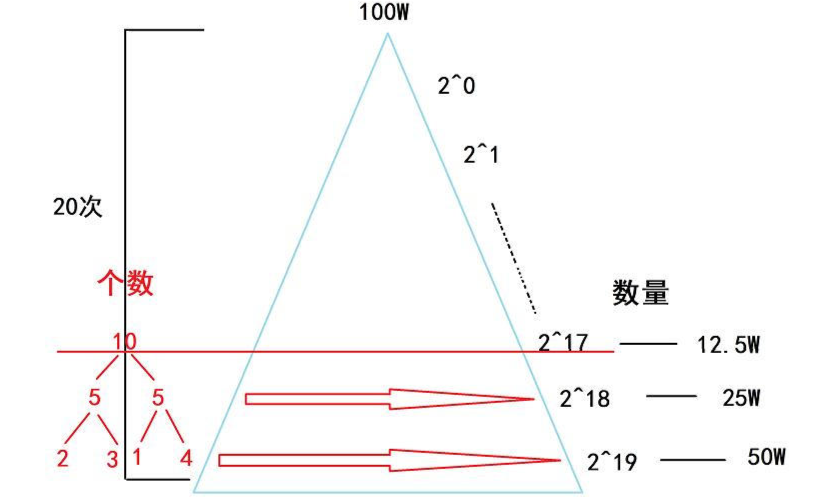
时间复杂度:通常情况下,快速排序需要递归 logN 层,每层都需遍历,时间复杂度为 O (NlogN)。但当基准值是数组中的最大或最小值(如有序数组排序且选首元素为基准)时,递归深度为 n,单趟排序也为 n,时间复杂度会变为 O (n²)。
空间复杂度:通常递归 logN 层,空间复杂度为 O (logN) 。若递归过深,如在最坏情况下,空间复杂度可能会接近 O (N)。
思考:由时间复杂度分析可知:当基准值是数组中的最大或最小值(如有序数组排序且选首元素为基准)时,递归深度为 n,单趟排序也为 n,时间复杂度会变为 O (n²)。这样子也会使得时间复杂度增大,使得排序效率极低,那么有没有办法改善呢❓
算法优化
- 改变基准值:若基准值为数组最值,会使递归深度加深、排序效率降低。可以采用随机数法,在数组中随机选择一个数作为基数,降低选到最大或最小值的概率;或者使用三数取中法,选取数组第一个、中间和最后一个元素中的中间值作为基准元素,减少最坏情况发生。
- 三指针分划区间:当数组重复元素较多时,普通快排效率降低。三指针分划区间定义 left、cur、right 三个指针,cur 遍历数组,根据 arr [cur] 与 key 的大小关系进行不同操作,最终将数组划分为小于 key、等于 key、大于 key 三个区间,提高排序效率。
- 区间优化:当递归到较深层级且子数组长度较短时,快速排序递归的函数调用和返回开销明显。可以设定数组长度下限阈值,当子数组长度小于阈值时,改用插入排序,提升效率。
逐一分析:
① 改变基准值
- 在我们选择基准值时,都是以数组中第一个数作为基准值进行排序,这样写的好处是非常方便且易懂,但是也有个大问题。
- 如果基准值是数组中的最大或最小值时,会导致快速排序的递归深度会非常深,排序效率会很低。
- 若是一个有序数组使用快速排序,则递归深度为n,单趟排序也为n,时间复杂度为O(n^2)。
- 为了防止出现这种情况,我们需要改变基准值:
1)随机数
在数组中随机选择一个数作为基数,每次都选到最大或最小的概率很小,但是有概率会选到最大或最小值。
#include <stdlib.h>
#include <time.h>
int GetRandIndex(int* arr, int left, int right)
{srand((size_t)time(NULL)); return rand() % (right-left+1) +left;
}2)三数取中
int GetMid(int* arr, int left, int right)
{int mid = (left + right) / 2;if (arr[left] < arr[mid]){if (arr[mid] < arr[right]){return mid;}else if (arr[left] > arr[right]){return left;}else{return right;}}else //arr[left] > arr[mid]{if (arr[mid] > arr[right]){return mid;}else if (arr[mid] > arr[left]){return left;}else{return right;}}
}②三指针分划区间
除了数组有序的情况外,当数组的重复元素较多时,也会导致快排的效率降低。这时我们需要用上三指针分划区间。
三指针分划区间是快速排序算法中的一种分区策略,它主要用于处理包含多个相同基准值元素的数组。
1)步骤
一、核心定义:3 个指针的初始定位
算法通过 3 个指针划分数组,初始状态如下(假设数组下标从 0 开始):
| 指针名称 | 初始指向位置 | 核心作用 |
| left | 数组首元素(下标 0) | 标记 “小于 key 的区间” 的右边界(最终left左侧均为小于 key 的元素) |
| cur | 数组第二个元素(下标 1) | 遍历指针,负责逐个检查元素与 key 的大小关系 |
| right | 数组最后一个元素(下标len(arr)-1) | 标记 “大于 key 的区间” 的左边界(最终right右侧均为大于 key 的元素) |
| key | 划分基准值(需提前指定,如数组首元素、中间元素等) | 作为划分标准,将数组分为 “小于、等于、大于” 三类元素 |
二、执行流程:cur 遍历与指针调整
cur从左向右遍历数组,根据arr[cur]与key的大小关系,执行 3 种操作,直至cur > right(遍历终止条件):
- 当
arr[cur] < key:
- 交换
arr[cur]与arr[left](将 “小于 key 的元素” 归入left左侧的区间);- 同时
cur++(继续遍历下一个元素)、left++(“小于 key 的区间” 右边界右移)。- 当
arr[cur] > key:
- 交换
arr[cur]与arr[right](将 “大于 key 的元素” 归入right右侧的区间);- 仅
right--(“大于 key 的区间” 左边界左移),不移动 cur(因为交换后cur指向的新元素未检查过)。- 当
arr[cur] == key:
- 无需交换,直接
cur++(“等于 key 的元素” 自然落在中间区间,继续遍历下一个元素)。
三、最终结果:3 个区间的明确划分
遍历终止(cur > right)后,数组被精准划分为 3 个不重叠的连续区间,区间范围固定:
| 区间类型 | 区间范围(下标) | 区间内元素特点 |
| 小于 key | [begin, left-1](begin为数组起始下标,通常是 0) | 所有元素严格小于key |
| 等于 key | [left, right] | 所有元素等于key |
| 大于 key | [right+1, end](end为数组结束下标,通常是len(arr)-1) | 所有元素严格大于key |
2)代码实现
void Swap(int* p1, int* p2)
{int tmp = *p1;*p1 = *p2;*p2 = tmp;
}int GetMid(int* arr, int left, int right)
{int mid = (left + right) / 2;if (arr[left] < arr[mid]){if (arr[mid] < arr[right]){return mid;}else if (arr[left] > arr[right]){return left;}else{return right;}}else //arr[left] > arr[mid]{if (arr[mid] > arr[right]){return mid;}else if (arr[mid] > arr[left]){return left;}else{return right;}}
}void ThreeDivision(int* arr, int* left, int* right)
{int key = arr[*left]; // 以数组的第一个元素作为基准值int cur = *left + 1; // 从数组的第二个元素开始遍历while (cur <= *right){if (arr[cur] < key) // 如果当前元素小于基准值{// 与left指向的元素交换,并移动left和curSwap(&arr[(*left)++], &arr[cur++]);}else if (arr[cur] > key){// 与right指向的元素交换,并移动right // 注意:这里不移动cur// 因为新交换到cur位置的值可能需要再次比较Swap(&arr[cur], &arr[(*right)--]);}else{cur++;}}
}
void QuickSort(int* arr, int begin, int end)
{if (begin >= end){return;} int mid = GetMid(arr, begin, end);Swap(&arr[begin], &arr[mid]);int left = begin;int right = end;ThreeDivision(arr, &left, &right);//三指针划分区间//[begin, left - 1][left, right][right + 1, end]// 递归排序基准元素左边的子数组 QuickSort(arr, left, mid - 1);// 递归排序基准元素右边的子数组 QuickSort(arr, mid + 1, right);
}③区间优化
在快速排序算法中,当递归到较深层级且处理的子数组长度较短时,继续使用递归快速排序可能会导致效率降低。
为什么效率会降低❓:
快速排序的递归类似于二叉树的形式,每次递归调用都会涉及函数调用和返回的开销,包括保存和恢复调用栈的上下文。当递归层级很深且处理的子问题规模很小时,这些开销会变得更加明显:
- 递归调用开销占比升高:短子数组排序本身计算量小,而每次递归的函数上下文保存等开销占比大幅增加,拖慢整体效率;
- 栈空间占用与溢出风险:递归层级深,栈空间消耗多,可能引发溢出,即使未溢出也影响系统性能;
- 缓存利用率低:短子数组数据难有效利用缓存,数据访问开销增大;
- 难借局部有序性:深层子数组常具局部有序性,快排无法利用,而适合的算法(如插入排序)未被启用,效率相对偏低。
为了优化这种情况,可以设定一个数组长度的下限阈值。当子数组长度小于这个阈值时,不再采用递归快速排序,而是改用效率更高的插入排序算法。
void QuickSort(int* arr, int left, int right)
{if (left >= right){return;}//数组长度小于10时,调用插入排序if (right - left + 1 < 10){InsertSort(arr + left, right - left + 1);return;}int mid = PartSort3(arr, left, right);//单趟排序// 递归排序基准元素左边的子数组 QuickSort(arr, left, mid - 1);// 递归排序基准元素右边的子数组 QuickSort(arr, mid + 1, right);
}非递归实现
当递归太深时会存在栈溢出的风险,因此,为了避免这种风险我们除了采用尾递归优化空间外,我们还可以采用非递归的形式实现快速排序。
非递归实现的方法需要使用数据结构——栈,利用其后进先出的形式模拟实现递归。
如果不太清楚的可以看看这篇文章[数据结构——lesson6.栈]
实现步骤
- 初始化:检查传入的数组区间是否有效,若
begin >= end,则无需排序,直接返回。创建一个栈用于存储子区间的起始和结束下标,并将待排序数组的初始区间(begin, end)的起始和结束下标压入栈中。- 循环处理:当栈不为空时,进入循环。从栈中弹出当前区间的结束下标
end和起始下标begin。- 单趟排序:对当前区间
(begin, end)进行单趟排序,找到基准值key的正确位置keyi。- 确定并压入子区间:根据基准值的位置
keyi,将当前区间划分为左右两个子区间(begin1, end1)和(begin2, end2)。若右子区间(begin2, end2)包含多于一个元素,则将其起始和结束下标压入栈中;同理,若左子区间(begin1, end1)包含多于一个元素,也将其起始和结束下标压入栈中。通常先压入右子区间再压入左子区间,以符合递归快速排序的前序遍历顺序。- 重复处理:回到步骤 2,继续处理栈中的下一个区间,直到栈为空。此时,所有子区间都已排序完毕,非递归快速排序结束。
- 销毁栈:最后,销毁栈,释放其占用的内存资源。
void QuickSortNonR(int* arr, int left, int right)
{ST st;STInit(&st);// 将初始的排序范围(整个数组)的左右边界压入栈中STPush(&st, right);STPush(&st, left);while (!STEmpty(&st)){// 先从栈中弹出的为左边界int begin = STTop(&st);STPop(&st);// 后从栈中弹出的为右边界int end = STTop(&st);STPop(&st);// 对当前子数组进行分区,并返回基准值的最终位置int keyi = PartSort(arr, begin, end);// 区间划分为[begin, keyi-1] keyi [keyi+1, end]// 如果基准值右侧还有元素需要排序// 则将右边界和基准值右侧第一个元素的索引压入栈if (keyi + 1 < end){STPush(&st, end);STPush(&st, keyi + 1);}// 如果基准值右侧还有元素需要排序// 则将右边界和基准值右侧第一个元素的索引压入栈if (begin < keyi - 1){STPush(&st, keyi - 1);STPush(&st, begin);}}STDestroy(&st);
}结束语
本节说到了快排有三种递归的方法,分别是挖坑法、左右指针法以及前后指针法,而且还有非递归的写法,为的就是防止递归太深导致的栈溢出问题
下文我们将介绍两种外部排序算法——归并排序与计数排序
感谢你的三连支持!!!
