无人机飞行速度模块技术要点概述
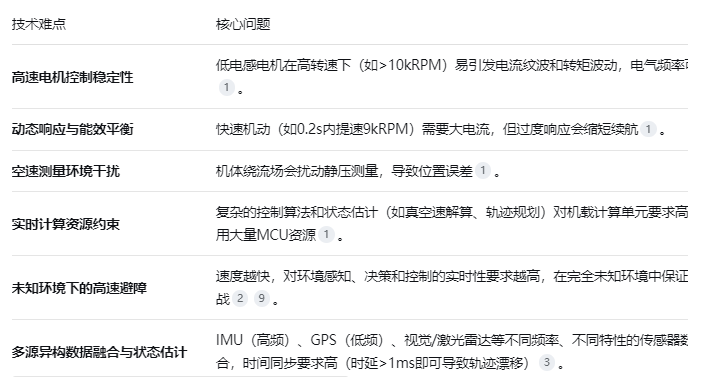
用一个表格来概括主要的技术难点和解决思路:
无人机速度模块的构成
无人机的“飞行速度模块”并非单一部件,而是一个集成了感知、决策、执行各个环节的闭环系统。它主要包括:
动力推进子系统:核心是电机(无刷直流电机BLDC)和电子调速器(ESC)。ESC接收飞控指令,通过微控制器解析目标转速,驱动MOSFET组成的三相桥,将直流电转换为三相交流电驱动电机。
空速感知子系统:主要包括空速管(皮托管)、差压传感器(测量动压Pd)、绝压传感器(测量静压)以及信号调理电路(如运放AD620)。通过对动/静压数据的处理,采用分段线性插值等算法实时计算真空速(True Airspeed)。
姿态与导航子系统:核心是惯性测量单元(IMU,包含陀螺仪和加速度计),结合GPS、磁力计等,通过滤波算法(如扩展卡尔曼滤波EKF)进行多传感器融合,解算出无人机的姿态、位置、速度等状态信息。
飞行控制与规划子系统:飞控主板是“大脑”,它处理传感器信息,运行控制算法(如PID、模糊控制),生成控制指令,并进行轨迹规划。
技术要点与方案
1. 先进的控制算法:
模糊PI双闭环控制:在电机控制中,外环(速度环)采用模糊PI动态调整参数,提升响应速度并抑制超调;内环(电流环)采用滞环控制实现快速转矩跟踪。
磁场定向控制(FOC)及其优化:FOC能实现电机的平滑高效控制。进一步的优化包括自动电机参数识别(如绕组电阻、电感)以及基于绕组电阻变化的电机温度估算,防止过载损坏。
自适应与鲁棒控制:对于飞行器本身,在复杂机动或遇到干扰时,采用自适应滑模控制(在线估计干扰上界)、模型预测控制(MPC)(预测未来状态优化控制输入)等算法,增强系统的鲁棒性。
2. 精确的空速测量与补偿:
高精度ADC采样与数据处理:例如采用STM32F103内置12位ADC,进行多次采样(如52次)剔除极值后加权平均,以抑制噪声。
动态误差补偿:针对机体扰动导致的静压测量误差,需要通过计算流体动力学(CFD)仿真进行建模修正,并在算法中补偿。
3. 创新的系统架构与规划方法:
双轨制安全规划框架:例如香港大学SUPER系统采用的“探索轨迹”和“备份轨迹”。系统总是优先尝试高速的“探索轨迹”,但时刻准备着一条绝对安全的“备份轨迹”(位于已知自由空间),一旦前方出现不确定性可瞬间切换,极大保证了高速飞行的安全性。
端到端学习控制策略:例如上海交通大学团队采用的可微分物理建模,将深度学习与基于第一性原理的物理模型结合,在仿真中通过梯度下降直接优化控制策略,最终可部署在低算力机载计算机上,实现20m/s的高速避障。
前沿进展与应用
速度纪录的突破:香港中文大学(深圳)的学生自制微型无人机(247克)达到了340.78公里/小时的惊人速度,吉尼斯世界纪录。
未知环境中的高速自主飞行:香港大学的SUPER无人机在完全未知的复杂森林环境中实现了20 m/s(72公里/小时) 的安全自主飞行,并能避开细至2.5毫米的电线。
端到端视觉高速避障:上海交通大学的研究实现了仅依靠单目深度感知和可微分物理训练的控制策略,在20m/s速度下于未知林地中避障,甚至实现了多机“零通信”协同。
新型动力与平台:北航研发的全球首款喷气式高速垂直起降无人机,结合旋翼垂直起降和喷气发动机高速巡航,时速可达230公里,展示了无人机平台设计的创新。
应用场景与未来趋势
高速无人机技术在诸多领域展现出巨大潜力:
应急救援与搜救:快速抵达灾害现场,争分夺秒。
基础设施巡检:高效巡检电力线、油气管道、桥梁等。
物流配送:未来城市内和区域间的快速货物运输。
国防安全:侦察、监视、甚至蜂群作战。