Hough Transform 超详细学习笔记
Hough Transform 超详细学习笔记
注意: 使用英文作为章节名,大约 90% 内容为中文。
Image and parameter space
先定义一个工具函数,方便画出网格线和坐标系
import numpy as np
import matplotlib.pyplot as plt
from typing import List, Tuple
from PIL import Image
import cv2def plot_points_and_lines_with_grid(ax: plt.Axes,ax_labels = ["x", "y"],scatter_arg_kwarg_pair: Tuple = None,line_arg_kwarg_pairs: List[Tuple] = None,limits: List[int] = [-5, 5, -5, 5]
):"""_summary_https://stackoverflow.com/questions/13430231/how-i-can-get-cartesian-coordinate-system-in-matplotlibArgs:ax (_type_): _description_scatter_arg_kwarg_pair (Tuple, optional): _description_. Defaults to None.line_arg_kwarg_pairs (List[Tuple], optional): _description_. Defaults to None.label_size (int, optional): _description_. Defaults to 14.Returns:_type_: _description_""" # Plot pointsif scatter_arg_kwarg_pair is not None:scatter_args, scatter_kwargs = scatter_arg_kwarg_pairax.scatter(*scatter_args, **scatter_kwargs)# Plot linesif line_arg_kwarg_pairs is not None:for line_args, line_kwargs in line_arg_kwarg_pairs:ax.plot(*line_args, **line_kwargs)# Select length of axes and the space between tick labelsxmin, xmax, ymin, ymax = limitsticks_frequency = 1# Set identical scales for both axesax.set(xlim=(xmin-1, xmax+1), ylim=(ymin-1, ymax+1), aspect='equal')# Set bottom and left spines as x and y axes of coordinate systemax.spines['bottom'].set_position('zero')ax.spines['left'].set_position('zero')# Remove top and right spinesax.spines['top'].set_visible(False)ax.spines['right'].set_visible(False)# Create 'x' and 'y' labels placed at the end of the axesax.set_xlabel(ax_labels[0], size=14, labelpad=-24, x=1.03)ax.set_ylabel(ax_labels[1], size=14, labelpad=-21, y=1.02, rotation=0)# Create custom major ticks to determine position of tick labelsx_ticks = np.arange(xmin, xmax+1, ticks_frequency)y_ticks = np.arange(ymin, ymax+1, ticks_frequency)ax.set_xticks(x_ticks[x_ticks != 0])ax.set_yticks(y_ticks[y_ticks != 0])# Create minor ticks placed at each integer to enable drawing of minor grid# lines: note that this has no effect in this example with ticks_frequency=1ax.set_xticks(np.arange(xmin, xmax+1), minor=True)ax.set_yticks(np.arange(ymin, ymax+1), minor=True)# Draw major and minor grid linesax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)return ax
Image Space and Parameter Space
Image space
在 Image Space 中,我们将一条直线表示为:
y=mx+b y = mx + b y=mx+b
其中 mmm 和 bbb 为 parameters,xxx 和 yyy 为 variables
Parameter Space
在 Parameter Space 中,我们将一条直接表示为:
y−mx=b y - mx = b y−mx=b
其中 xxx 和 yyy 为 parameters,mmm 和 bbb 为 variables
def line_image_space(x, m, b):return m * x + bdef line_parameter_space(m, x, y):return y - m * x
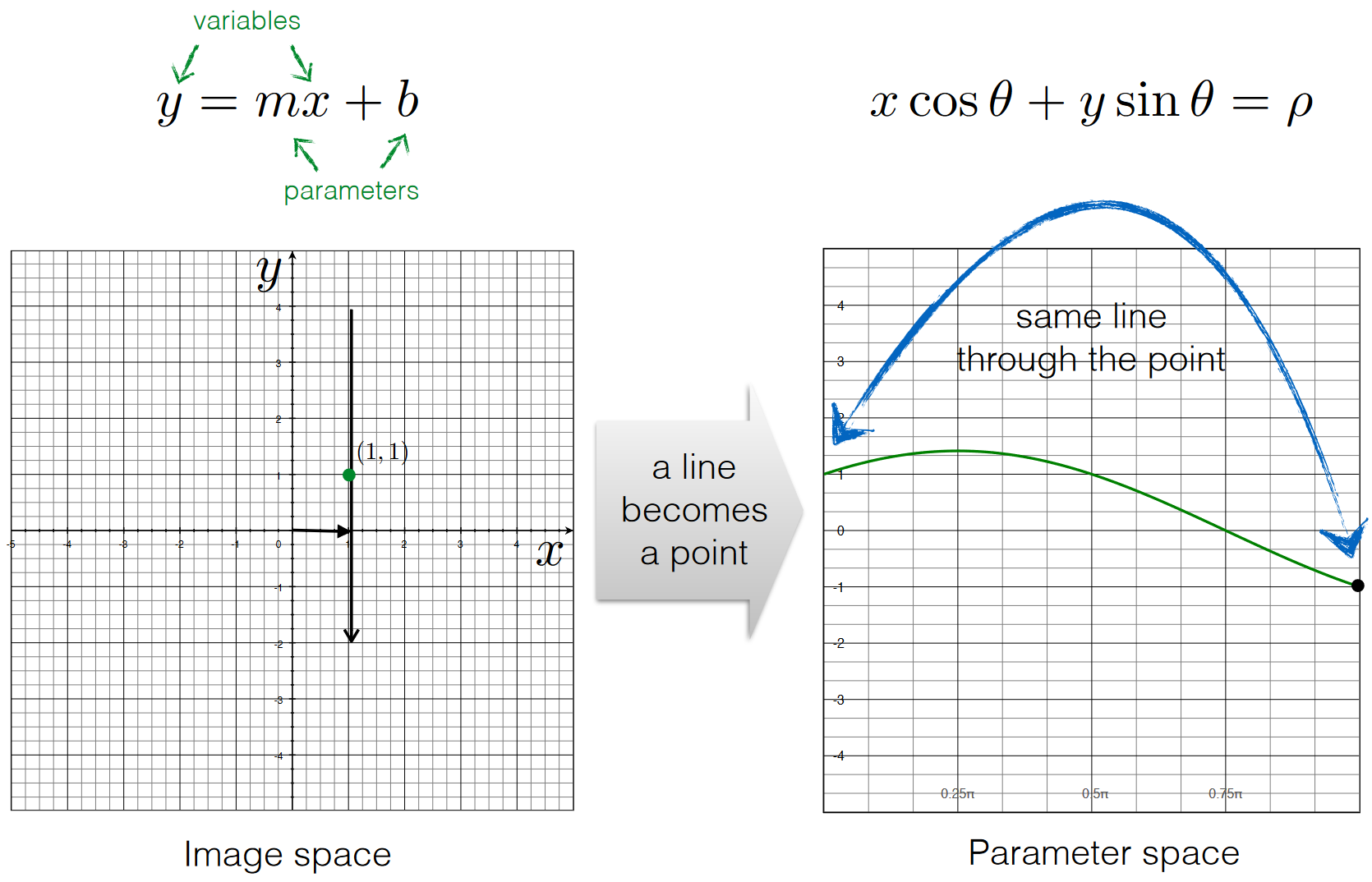
A line becomes a point
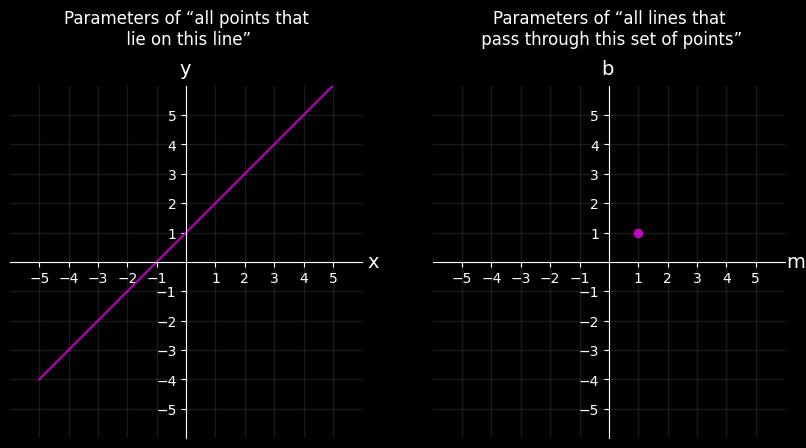
下图中,我们将一个 image space 的直线转化为 parameter space 中的一个点:
- Image Space 直线的斜率
m对应 Parameter Space 中点的横轴坐标m - Image Space 直线的截距
b坐标对应 Parameter Space 中点的纵轴坐标b
nums = np.linspace(-5, 5, 11)fig, ax = plt.subplots(1, 2, figsize=(10, 5))# Plot On Image Space
b = 1
m = 1
x = nums.copy()
y = line_image_space(x, m, b)ax[0].set_title("Parameters of “all points that\n lie on this line”", pad=30)
plot_points_and_lines_with_grid(ax[0],line_arg_kwarg_pairs = [[(x, y), {"color": "m"}]]
)# Plot On Parameter Space
ax[1].set_title("Parameters of “all lines that\n pass through this set of points”", pad = 30)
plot_points_and_lines_with_grid(ax[1],scatter_arg_kwarg_pair = [(), {"x": [m],"y": [b],"c": ["m"],}],ax_labels = ['m', 'b']
)
plt.show()
![[101-Articles/Hough Transform 超详细学习笔记/attachments/hough_transform_7_0.png]]
A Point becomes a line
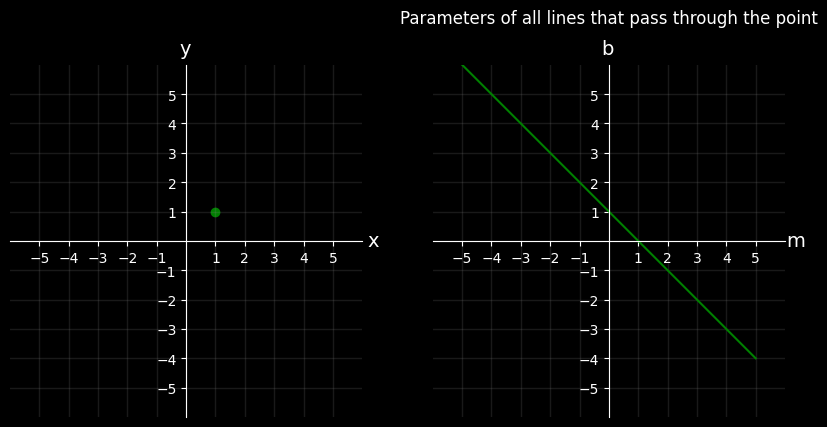
回顾 Image Space: y=mx+by = mx + by=mx+b,Parameter Space: y−mx=by - mx = by−mx=b
下图中,我们将一个 image space 的点转化为 parameter space 中的一条直线:
- Image Space 点的
x坐标对应 Parameter Space 中直线的斜率-x, - Image Space 点的
y坐标变成 Parameter Space 中直线的截距y
fig, ax = plt.subplots(1, 2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": [image_space_point[0]],"y": [image_space_point[1]],"c": ["g"],}]
)# Line On Parameter Space
m = nums.copy()
x, y = image_space_point
b = line_parameter_space(m, x, y)ax[1].set_title("Parameters of all lines that pass through the point", pad = 30)plot_points_and_lines_with_grid(ax[1],line_arg_kwarg_pairs = [[(m, b), {"color": "g"}]],ax_labels = ['m', 'b']
)plt.show()
Four points becomes?
回顾 Image Space: y=mx+by = mx + by=mx+b,Parameter Space: y−mx=by - mx = by−mx=b
下图中,我们将 4 个来自 image space 的点,转换为 parameter space 中的直线
- Image Space 点的
x坐标对应 Parameter Space 中直线的斜率-x, - Image Space 点的
y坐标变成 Parameter Space 中直线的截距y
复核:下图下图绿色的点和直线,左侧 image space 点 [1, -1] 对应右侧 parameter space 直线
- 斜率为
-x,即-1 - 截距为
y,即1,具体来说右图绿色直线与b轴相交于[0, -1]
fig, ax = plt.subplots(1, 2, figsize=(10, 5))# Plot On Image Space
pts = [[1, 1], [3, 3], [-2, -2], [1, -1]]
colors = ["green", "red", "blue", "yellow"]xs = [pt[0] for pt in pts]
ys = [pt[1] for pt in pts]plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": xs,"y": ys,"c": colors,}]
)# Plot On Parameter Space
# x, y = image_space_pointline_arg_kwarg_pairs = [[(nums.copy(), line_parameter_space(nums.copy(), x, y)), {"color": color}] for x, y, color in zip(xs, ys, colors)]ax[1].set_title("Parameters of all lines that\n pass through these point", pad = 30)
plot_points_and_lines_with_grid(ax[1],line_arg_kwarg_pairs = line_arg_kwarg_pairs,ax_labels = ['m', 'b']
)plt.show()

Line Detection by Hough Transform
Key idea: points vote for the possible models
- Quantize Parameter Space (m,c)(m, c)(m,c)
- Create Accumulator Array A(m,c)A(m, c)A(m,c)
- Set A(m,c)=0∀m,cA(m, c)=0 \quad \forall m, cA(m,c)=0∀m,c
- For each image edge (xi,yi)\left(x_i, y_i\right)(xi,yi)
- For each element in A(m,c)A(m, c)A(m,c)
- If (m,c)(m, c)(m,c) lies on the line: c=−xim+yic=-x_i m+y_ic=−xim+yi
- Increment A(m,c)=A(m,c)+1A(m, c)=A(m, c)+1A(m,c)=A(m,c)+1
- Find local maxima in A(m,c)A(m, c)A(m,c)
遍历边缘图中的点:
- 参数空间中由 slope mmm 和 intercept ccc 组成,构成一条条直线方程
- 将边缘图中的点的坐标(x,y)代入方程之中,计算 b=y−mxb = y - mxb=y−mx
- 如果 bbb 与 ccc 相等,则说明点在直线上,投票 +1
准备宽高为 (11, 11) 的 edge 图,以其中心点为原点,将 [[1, 1], [3, 3], [-2, -2], [1, -1]] 这四个点移动到相应位置
edge_img = np.zeros((11, 11), dtype=np.uint8)
offset = 5
# origin_ij = (5, 5)
pts = [[1, 1], [3, 3], [-2, -2], [1, -1]]
pts = np.array(pts) + 5for i, j in pts:edge_img[i, j] = 255# Image.fromarray(cv2.resize(edge_img, (110, 110), interpolation=cv2.INTER_NEAREST))print(pts.tolist())
[[6, 6], [8, 8], [3, 3], [6, 4]]
移动之后,如下图所示
fig, ax = plt.subplots(figsize=(5, 5))# Plot On Image Space
colors = ["green", "red", "blue", "yellow"]xs = [pt[0] for pt in pts.tolist()]
ys = [pt[1] for pt in pts.tolist()]plot_points_and_lines_with_grid(ax,scatter_arg_kwarg_pair = [(), {"x": xs,"y": ys,"c": colors,}],limits=[0, 10, 0, 10]
)
plt.show()

实现 hough transform 算法并根据 4 个点,计算出相应的直线
def raw_hough_line_detection(edge_img,m_values,c_values,
):# width, height = edge_img.shapenum_m = len(m_values)num_c = len(c_values)accumulator = np.zeros((num_m, num_c))y_idxs, x_idxs = np.nonzero(edge_img) # (row, col) index to edgesfor x, y in zip(x_idxs, y_idxs):for m_idx, m in enumerate(m_values):for c_idx, c in enumerate(c_values):if np.isclose(c, y - m * x):accumulator[m_idx, c_idx] += 1return accumulator, m_values, c_valuesm_values = np.arange(-5, 5 + 1, 1)
c_values = np.arange(-10, 10 + 1, 1)accumulator, m_values, c_values = raw_hough_line_detection(edge_img, m_values, c_values)idx = np.argmax(accumulator)
row = idx // len(c_values)
col = idx % len(c_values)m, c = m_values[row], c_values[col]print(m, c)
1 0
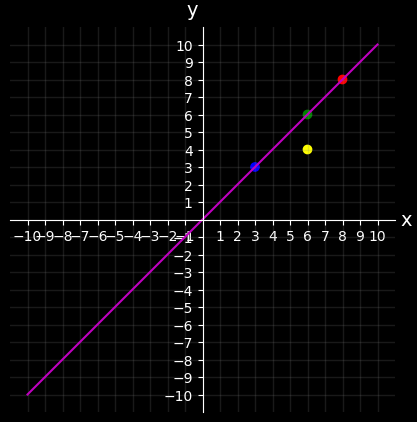
将 4 个点和计算出来的直线画出来
# Plot On Image Space
points = pts.tolist()
colors = ["green", "red", "blue", "yellow"]nums = np.arange(-10, 10+1, 1)xs = [pt[0] for pt in points]
ys = [pt[1] for pt in points]# Plot On Image Space
points = pts.tolist()
colors = ["green", "red", "blue", "yellow"]xs = [pt[0] for pt in points]
ys = [pt[1] for pt in points]nums = np.arange(-10, 10+1, 1)
x = nums.copy()
y = line_image_space(x, m, c)fig, ax = plt.subplots(1, 1, figsize=(5, 5))plot_points_and_lines_with_grid(ax,scatter_arg_kwarg_pair = [(), {"x": xs,"y": ys,"c": colors,}],line_arg_kwarg_pairs = [[(x, y), {"color": "m"}]],limits=[-10, 10, -10, 10]
)plt.show()
参数空间的问题
A(m,c)A(m,c)A(m,c) 中 mmm 和 ccc 的取值范围:
−∞<m<∞−∞<c<∞ \begin{align*} -\infty < m < \infty \\ -\infty < c < \infty \end{align*} −∞<m<∞−∞<c<∞
即 A(m,c)A(m,c)A(m,c) 是无限的
Line Parameterizations
Slope intercept form
y=mx+b y = mx + b y=mx+b
其中
- mmm 是 slope
- bbb 是 y-intercept
Double intercept form
xa+yb=1 \frac{x}{a} + \frac{y}{b} = 1 ax+by=1
其中
- aaa 是 x-intercept
- bbb 是 y-intercept
推导过程:
假设一条直线与 x 轴相交于 (a,0)(a,0)(a,0),与 yyy 轴相交于 (0,b)(0,b)(0,b)
根据斜率相同,得到
y−bx−0=y−0x−a \frac{y - b}{x - 0}=\frac{y - 0}{x - a} x−0y−b=x−ay−0
然后推导
(y−b)(x−a)=(y−0)(x−0)yx−ya−bx+ba=yx−ya−bx+ba=0ya+bx=bayb+xa=1 \begin{align*} (y-b)(x-a) &= (y-0)(x-0) \\ yx - ya -bx + ba &= yx \\ -ya - bx + ba &= 0 \\ ya + bx &= ba \\ \frac{y}{b} + \frac{x}{a} &= 1 \end{align*} (y−b)(x−a)yx−ya−bx+ba−ya−bx+baya+bxby+ax=(y−0)(x−0)=yx=0=ba=1
最后得到
xa+yb=1 \frac{x}{a} + \frac{y}{b} = 1 ax+by=1
Normal form (法线式)
过原点向直线作一垂直线段,若该线长度为 ρ\rhoρ ,且与正 xxx- 轴的倾斜角为 θ\thetaθ ,则有方程
xcosθ+ysinθ=ρ x \cos \theta + y \sin \theta = \rho xcosθ+ysinθ=ρ
其中 cosθ\cos \thetacosθ 和 sinθ\sin \thetasinθ 可以表示为:
cosθ=ρa→a=ρcosθsinθ=ρb→b=ρsinθ \begin{aligned} \cos \theta & =\frac{\rho}{a} \rightarrow a=\frac{\rho}{\cos \theta} \\ \sin \theta & =\frac{\rho}{b} \rightarrow b=\frac{\rho}{\sin \theta} \end{aligned} cosθsinθ=aρ→a=cosθρ=bρ→b=sinθρ
将其代入 xa+yb=1\frac{x}{a} + \frac{y}{b} = 1ax+by=1, 可得
xcosθ+ysinθ=ρ x \cos \theta + y \sin \theta = \rho xcosθ+ysinθ=ρ
Better Parameterization
Use normal form:
xcosθ+ysinθ=ρ x \cos \theta+y \sin \theta=\rho xcosθ+ysinθ=ρ
Given points (xi,yi)\left(x_i, y_i\right)(xi,yi) find (ρ,θ)(\rho, \theta)(ρ,θ) that describe all lines that can pass through this point.
What is the range of ρ,θ\rho, \thetaρ,θ ?
0≤θ≤2π0≤ρ≤ρmax \begin{aligned} & 0 \leq \theta \leq 2 \pi \\ & 0 \leq \rho \leq \rho_{\max} \end{aligned} 0≤θ≤2π0≤ρ≤ρmax
实际应用中
- 可以限定 θ\thetaθ 的取值为 [0,π][0,\pi][0,π],即可,因为 θ\thetaθ 和 θ+π\theta + \piθ+π 是同一直线角度的 2 种表述
- ρmax\rho_{\max}ρmax 由图片大小决定,为其对角线的长度:x2+y2\sqrt{x^2 + y^2}x2+y2。
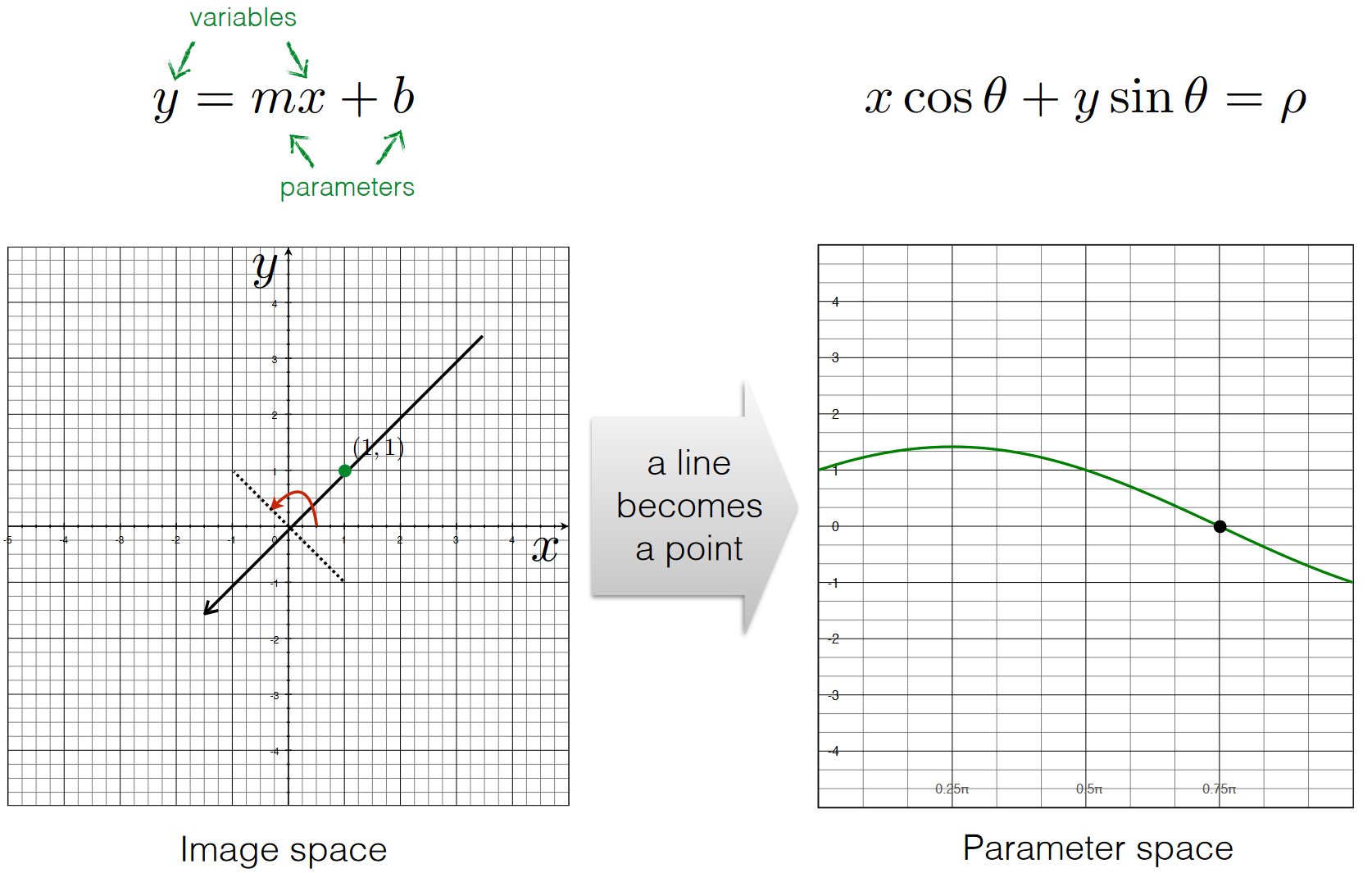
Image Space and Parameter Space (Normal form)
在 Image Space 中,我们将一条直线表示为:
y=mx+b y = mx + b y=mx+b
其中 mmm 和 bbb 为 parameters,xxx 和 yyy 为 variables
在 Parameter Space 中,我们将一条直线表示为法线式:
xcosθ+ysinθ=ρ x \cos \theta+y \sin \theta=\rho xcosθ+ysinθ=ρ
变量 xxx 和 yyy 为 parameters, θ\thetaθ 和 ρ\rhoρ 为 variables
def normal_form_line_parameter_space(theta, x, y):return x * np.cos(theta) + y * np.sin(theta)
增加适用于法线式直线表达的方便画网格的函数
def plot_points_and_lines_with_grid_theta_rho(ax: plt.Axes,ax_labels = [r"$\theta$", r"$\rho$"],scatter_arg_kwarg_pair: List = None,line_arg_kwarg_pairs: List[List] = None,limits: List[int] = [-0.05 * np.pi, np.pi, -4.5, 4.5]
):"""_summary_https://stackoverflow.com/questions/13430231/how-i-can-get-cartesian-coordinate-system-in-matplotlibArgs:ax (_type_): _description_scatter_arg_kwarg_pair (Tuple, optional): _description_. Defaults to None.line_arg_kwarg_pairs (List[Tuple], optional): _description_. Defaults to None.label_size (int, optional): _description_. Defaults to 14.Returns:_type_: _description_"""# Plot pointsif scatter_arg_kwarg_pair is not None:scatter_args, scatter_kwargs = scatter_arg_kwarg_pairax.scatter(*scatter_args, **scatter_kwargs)# Plot linesif line_arg_kwarg_pairs is not None:for line_args, line_kwargs in line_arg_kwarg_pairs:ax.plot(*line_args, **line_kwargs)# Set bottom and left spines as x and y axes of coordinate system# ax.spines['bottom'].set_position('zero')ax.spines['left'].set_position('zero')# Remove top and right spinesax.spines['top'].set_visible(False)ax.spines['right'].set_visible(False)# Select length of axes and the space between tick labelsxmin, xmax, ymin, ymax = limitsticks_frequency = 1# Set identical scales for both axesax.set(xlim=(xmin, xmax), ylim=(ymin, ymax), aspect='auto')# # Create 'x' and 'y' labels placed at the end of the axesax.set_xlabel(ax_labels[0], size=14, labelpad=-24, x=1.03)ax.set_ylabel(ax_labels[1], size=14, labelpad=-21, y=1.02, rotation=0)# # Create custom major ticks to determine position of tick labelsy_ticks = np.arange(int(ymin), int(ymax)+1, ticks_frequency)ax.set_yticks(y_ticks)x_tick = np.arange(0, 1, 0.25)x_tick_labels = [ r"$0$", r"$0.25\pi$", r"$0.5\pi$", r"$0.75\pi$"]ax.set_xticks(x_tick*np.pi)ax.set_xticklabels(x_tick_labels, fontsize=14)ax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)return ax
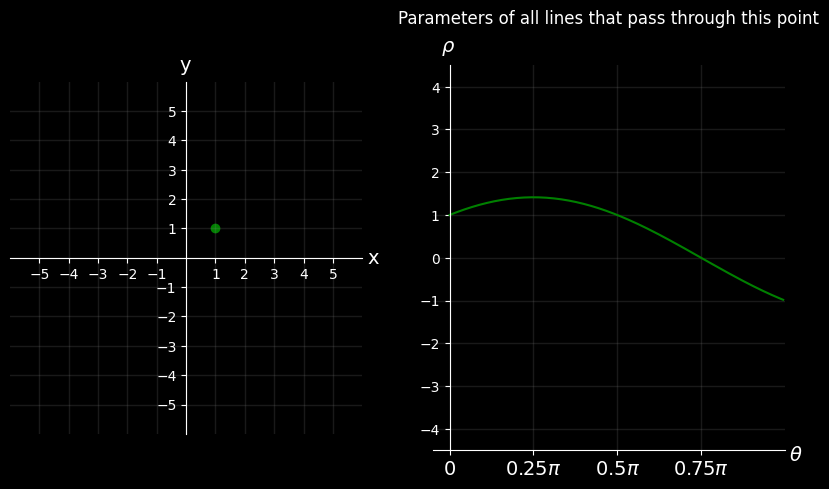
A point becomes a wave
对于点 (1,1)(1,1)(1,1),寻找所有经过该点的直线
fig, ax = plt.subplots(1,2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": [image_space_point[0]],"y": [image_space_point[1]],"c": ["g"],}]
)# Line on Parameter Space
degrees = np.arange(0, 180, 1)
thetas = np.deg2rad(degrees)rhos = normal_form_line_parameter_space(thetas, 1, 1)ax[1].set_title("Parameters of all lines that pass through this point", pad=30)plot_points_and_lines_with_grid_theta_rho(ax[1],line_arg_kwarg_pairs=[[(thetas, rhos), {"color": "g"}]]
)plt.show()
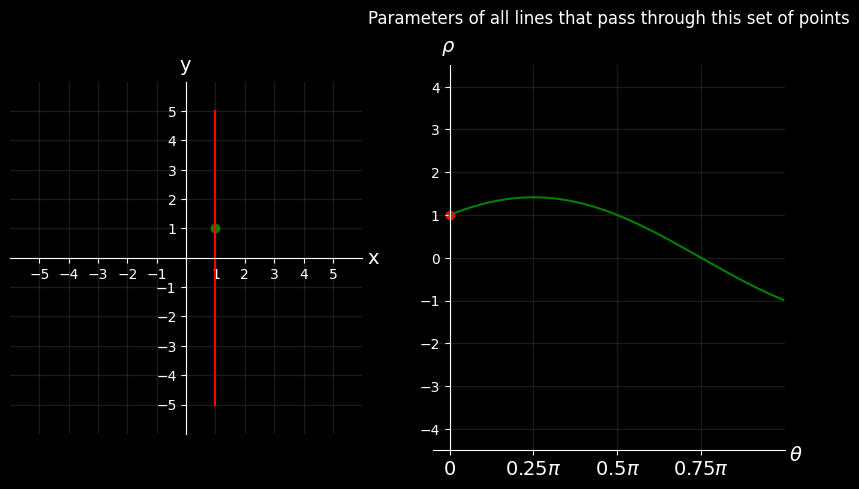
A line becomes a point (1)
对于直线 x=1x=1x=1(方向为向上),过原点向其作一垂直线段:
- 与原点的距离(线段长度): ρ=1\rho = 1ρ=1
- 线段与 xxx 轴的夹角为 θ=0\theta = 0θ=0
fig, ax = plt.subplots(1,2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]xs = np.repeat(1, repeats=11)
ys = np.arange(-5, 5+1, 1)plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": [image_space_point[0]],"y": [image_space_point[1]],"c": ["g"],}],line_arg_kwarg_pairs=[[(xs, ys), {"color": "r"}]]
)# Plot on Parameter Spacedegrees = np.arange(0, 180, 1)
line_thetas = np.deg2rad(degrees)line_rhos = normal_form_line_parameter_space(line_thetas, 1, 1)rho = 1
theta = 0ax[1].set_title("Parameters of all lines that pass through this set of points", pad=30)plot_points_and_lines_with_grid_theta_rho(ax[1],scatter_arg_kwarg_pair = [(), {"x": [theta],"y": [rho],"c": ["r"],}],line_arg_kwarg_pairs=[[(line_thetas, line_rhos), {"color": "g"}]]
)plt.show()
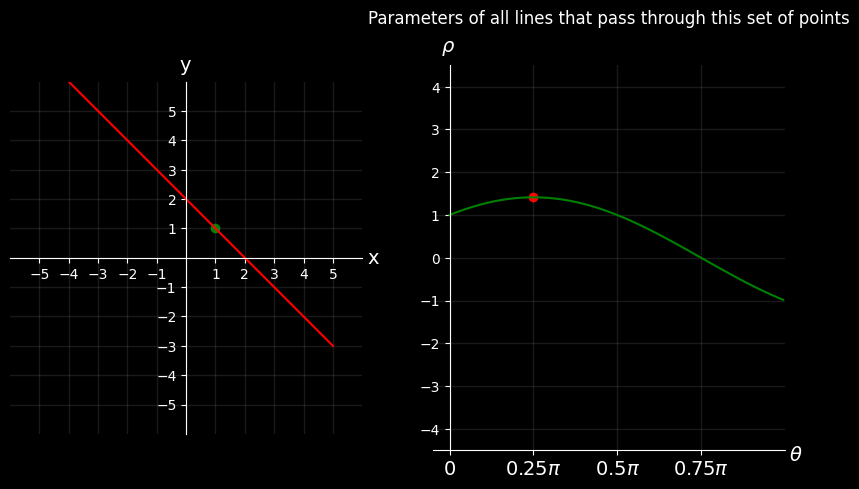
A line becomes a point (2)
对于直线 x=−x+2x=-x + 2x=−x+2,过原点向其作一垂直线段:
- 与原点的距离(线段长度): ρ=12+12\rho=\sqrt{1^2 + 1^2}ρ=12+12
- 线段与 xxx 轴的夹角为 454545 度,或者说是 θarccos1ρ\theta \arccos \frac{1}{\rho}θarccosρ1
fig, ax = plt.subplots(1,2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]xs = np.arange(-5, 5 + 1, 1)
m = -1
b = 2
ys = line_image_space(xs, m, b)plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": [image_space_point[0]],"y": [image_space_point[1]],"c": ["g"],}],line_arg_kwarg_pairs=[[(xs, ys), {"color": "r"}]]
)# Plot on Parameter Spacedegrees = np.arange(0, 180, 1)
line_thetas = np.deg2rad(degrees)
line_rhos = normal_form_line_parameter_space(line_thetas, 1, 1)rho = np.sqrt(1**2 + 1 **2)
theta = np.arccos(1/rho)ax[1].set_title("Parameters of all lines that pass through this set of points", pad=30)plot_points_and_lines_with_grid_theta_rho(ax[1],scatter_arg_kwarg_pair = [(), {"x": [theta],"y": [rho],"c": ["r"],}],line_arg_kwarg_pairs=[[(line_thetas, line_rhos), {"color": "g"}]]
)plt.show()
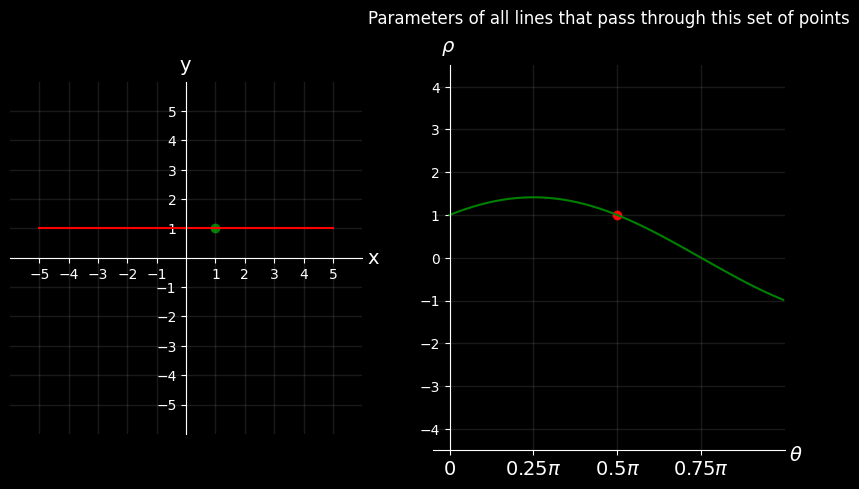
A line becomes a point (3)
对于直线 y=1y=1y=1,过原点向其作一垂直线段:
- 与原点的距离(线段长度): ρ=1\rho=1ρ=1
- 线段与 xxx 轴的夹角为 909090 度,或者说是 θ=arccos01\theta = \arccos \frac{0}{1}θ=arccos10,使用 Python 计算
np.deg2rad(90) == np.arccos(0)
fig, ax = plt.subplots(1,2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]xs = np.arange(-5, 5 + 1, 1)
ys = line_image_space(xs, 0, 1)plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": [image_space_point[0]],"y": [image_space_point[1]],"c": ["g"],}],line_arg_kwarg_pairs=[[(xs, ys), {"color": "r"}]]
)# Plot on Parameter Spacedegrees = np.arange(0, 180, 1)
line_thetas = np.deg2rad(degrees)
line_rhos = normal_form_line_parameter_space(line_thetas, 1, 1)rho = 1
theta = np.arccos(0/rho)ax[1].set_title("Parameters of all lines that pass through this set of points", pad=30)plot_points_and_lines_with_grid_theta_rho(ax[1],scatter_arg_kwarg_pair = [(), {"x": [theta],"y": [rho],"c": ["r"],}],line_arg_kwarg_pairs=[[(line_thetas, line_rhos), {"color": "g"}]]
)plt.show()
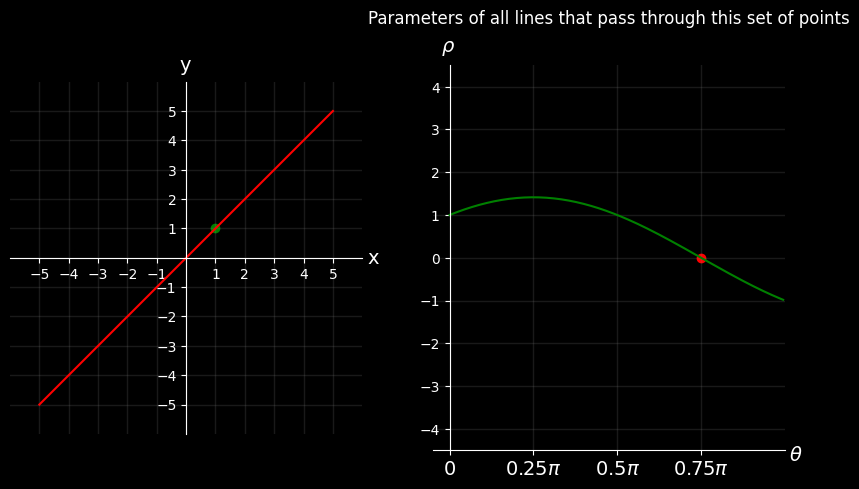
A line becomes a point (4)
对于直线 y=xy=xy=x,过原点向其作一垂直线段:
- 与原点的距离(线段长度): ρ=0\rho=0ρ=0
- 垂直线段经过点 (−1,−1)(-1,-1)(−1,−1),与 xxx 轴的夹角为 θ=arccos−112+12\theta = \arccos \frac{-1}{1^2 + 1^2}θ=arccos12+12−1
fig, ax = plt.subplots(1,2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]xs = np.arange(-5, 5 + 1, 1)
ys = line_image_space(xs, 1, 0)plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": [image_space_point[0]],"y": [image_space_point[1]],"c": ["g"],}],line_arg_kwarg_pairs=[[(xs, ys), {"color": "r"}]]
)# Plot on Parameter Spacedegrees = np.arange(0, 180, 1)
line_thetas = np.deg2rad(degrees)
line_rhos = normal_form_line_parameter_space(line_thetas, 1, 1)rho = 0
theta = np.arccos(-1/np.sqrt(1**2 + 1**2))ax[1].set_title("Parameters of all lines that pass through this set of points", pad=30)plot_points_and_lines_with_grid_theta_rho(ax[1],scatter_arg_kwarg_pair = [(), {"x": [theta],"y": [rho],"c": ["r"],}],line_arg_kwarg_pairs=[[(line_thetas, line_rhos), {"color": "g"}]]
)plt.show()
关于如何在上图画出垂直线段,参考下图:
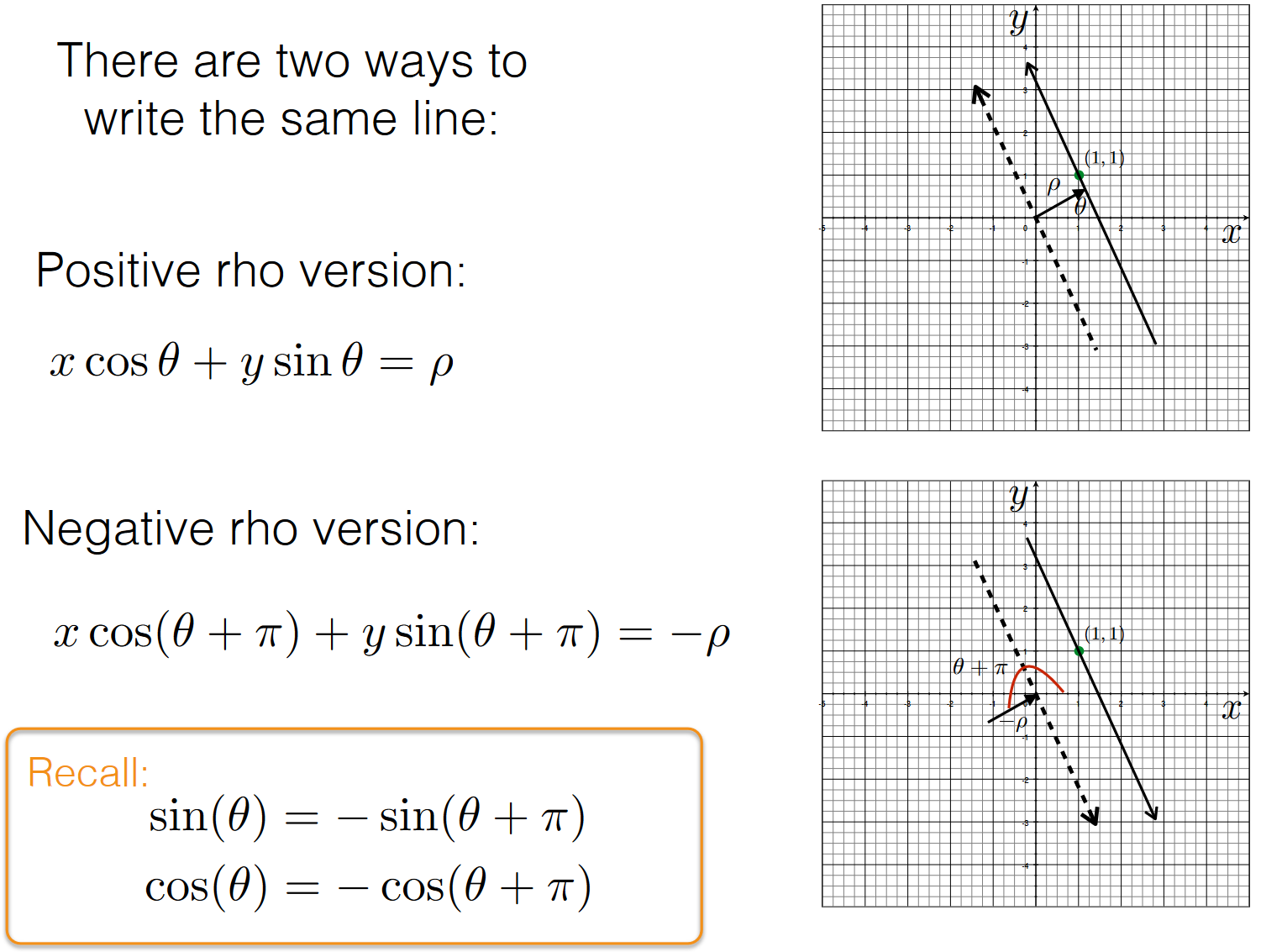
Why ρ\rhoρ is negative?
上图中的右图,点 (θ=0,ρ=1)(\theta = 0, \rho = 1)(θ=0,ρ=1) 和点 (θ=π,ρ=−1(\theta = \pi, \rho = -1(θ=π,ρ=−1) 表示同一条直线;ρ\rhoρ 为负数是因为方向不同,造成的 θ\thetaθ 值不同,从而导致 ρ\rhoρ 符号变化,具体见:
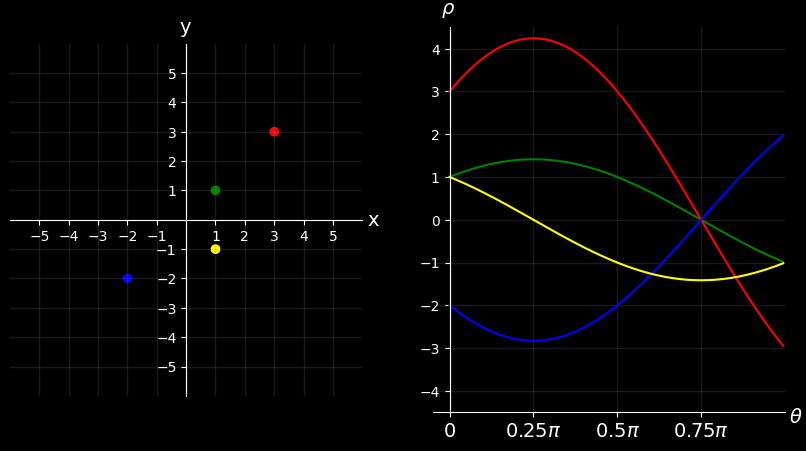
Four lines becomes?
fig, ax = plt.subplots(1,2, figsize=(10, 5))# Point On Image Space
image_space_point = [1, 1]# Plot On Image Space
pts = [[1, 1], [3, 3], [-2, -2], [1, -1]]
colors = ["green", "red", "blue", "yellow"]xs = [pt[0] for pt in pts]
ys = [pt[1] for pt in pts]plot_points_and_lines_with_grid(ax[0],scatter_arg_kwarg_pair = [(), {"x": xs,"y": ys,"c": colors,}],
)# Plot on Parameter Spacedegrees = np.arange(0, 180, 1)
thetas = np.deg2rad(degrees)line_arg_kwarg_pairs = [[(thetas.copy(), normal_form_line_parameter_space(thetas.copy(), x, y)), {"color": color}] for x, y, color in zip(xs, ys, colors)]plot_points_and_lines_with_grid_theta_rho(ax[1],line_arg_kwarg_pairs=line_arg_kwarg_pairs
)plt.show()
实现
- Initialize accumulator H to all zeros
- For each edge point (x,y)(x, y)(x,y) in the image
- For θ=0\theta=0θ=0 to 180
- ρ=xcosθ+ysinθ\rho=x \cos \theta+y \sin \thetaρ=xcosθ+ysinθ
- H(θ,ρ)=H(θ,ρ)+1H(\theta, \rho)=H(\theta, \rho)+1H(θ,ρ)=H(θ,ρ)+1
- end
end
- For θ=0\theta=0θ=0 to 180
- Find the value(s) of (θ,ρ)(\theta, \rho)(θ,ρ) where H(θ,ρ)H(\theta, \rho)H(θ,ρ) is a local maximum
- The detected line in the image is given by ρ=xcosθ+ysinθ\rho=x \cos \theta+y \sin \thetaρ=xcosθ+ysinθ
以下是来自 https://alyssaq.github.io/2014/understanding-hough-transform/ 的实现
## Implementationimport numpy as npdef hough_line_np(img):# Rho and Theta rangesthetas = np.deg2rad(np.arange(-90.0, 90.0))width, height = img.shapediag_len = int(np.ceil(np.sqrt(width * width + height * height))) # max_distrhos = np.linspace(-diag_len, diag_len, diag_len * 2)# Cache some resuable valuescos_t = np.cos(thetas)sin_t = np.sin(thetas)num_thetas = len(thetas)# Hough accumulator array of theta vs rhoaccumulator = np.zeros((2 * diag_len, num_thetas), dtype=np.uint64)y_idxs, x_idxs = np.nonzero(img) # (row, col) indexes to edges# Vote in the hough accumulatorfor i in range(len(x_idxs)):x = x_idxs[i]y = y_idxs[i]for t_idx in range(num_thetas):# Calculate rho. diag_len is added for a positive indexrho = round(x * cos_t[t_idx] + y * sin_t[t_idx]) + diag_lenaccumulator[rho, t_idx] += 1return accumulator, thetas, rhos## Usage# Create binary image and call hough_line
image = np.zeros((50,50))
image[10:40, 10:40] = np.eye(30)
accumulator, thetas, rhos = hough_line_np(image)# Easiest peak finding based on max votes
idx = np.argmax(accumulator)
rho = rhos[int(idx / accumulator.shape[1])]
theta = thetas[idx % accumulator.shape[1]]
print("rho={0:.2f}, theta={1:.0f}".format(rho, np.rad2deg(theta)))
rho=0.50, theta=-45
使用 OpenCV
img = np.zeros((192, 192), dtype=np.uint8)points = [[100, 100], [120, 120], [150, 150], [180, 180], [142, 23]]for i, j in points:img[i, j] = 255Image.fromarray(img)
lines = cv2.HoughLines(img, 1, np.pi / 180, 2)cdst = img.copy()# Draw the lines
if lines is not None:for i in range(0, len(lines)):rho = lines[i][0][0]theta = lines[i][0][1]print(theta, rho)a = np.cos(theta)b = np.sin(theta)x0 = a * rhoy0 = b * rhopt1 = (int(x0 + 1000*(-b)), int(y0 + 1000*(a)))pt2 = (int(x0 - 1000*(-b)), int(y0 - 1000*(a)))cv2.line(cdst, pt1, pt2, (255,255,255), 1, cv2.LINE_AA)Image.fromarray(cdst)
2.3561945 0.0
上面的代码中
a=cosθb=sinθ a = \cos \theta \\ b = \sin \theta a=cosθb=sinθ
其中,根据定义,向量 (a,b)(a, b)(a,b) 与直线构建的向量是垂直的,那么直线可以表示为 v=(−b,a)v=(-b,a)v=(−b,a) 的向量(相乘为 0)。
根据直线公式公式
r=r0+tv \mathbf{r} = \mathbf{r}_0 + t \mathbf{v} r=r0+tv
上面的代码中 pt1 和 pt2 分别为 t=1000t=1000t=1000 和 t=−1000t=-1000t=−1000 时计算的
使用 scikit-image
from skimage.transform import hough_line, hough_line_peaks
hspace, angles, dists = hough_line(img)
hspace, angles, dists = hough_line_peaks(hspace, angles, dists)img_display = img.copy()for _, angle, dist in zip(hspace, angles, dists):a = np.cos(angle)b = np.sin(angle)(x0, y0) = dist * np.array([a, b])pt1 = (int(x0 + 1000*(-b))), int(y0 + 1000*(a))pt2 = (int(x0 - 1000*(-b))), int(y0 - 1000*(a))cv2.line(img_display, pt1, pt2, (255,255,255), 1, cv2.LINE_AA)Image.fromarray(img_display)
参考资料
- https://www.cs.cmu.edu/~16385/s17/Slides/5.3_Hough_Transform.pdf
- https://alyssaq.github.io/2014/understanding-hough-transform/
- https://gist.github.com/bygreencn/6a900fd2ff5d0101473acbc3783c4d92
- https://docs.opencv.org/4.x/d9/db0/tutorial_hough_lines.html
- https://scikit-image.org/docs/stable/auto_examples/edges/plot_line_hough_transform.html