打破“不可能三角”:WALL-OSS开源,具身智能迎来“安卓时刻”?
目录
引言:当“大脑”学会思考,机器人才能走出实验室
一、具身智能的“不可能三角”:机器人“大脑”的核心困境
二、WALL-OSS的四把重锤:如何系统性地破解难题?
2.1 第一锤:更聪明的“大脑”架构 —— “共享注意力 + 专家分流”
2.2 第二锤:运动员式的训练法则 —— “先启发,后融合”
2.3 第三锤:贯穿物理世界的思维链 —— “统一跨层级CoT”
2.4 第四锤:源于真实世界的“养料” —— 高质量真机数据
三、“真开源”的魄力:为行业铺设一条高速公路
结论:一个值得期待的“安卓时刻”

🎬 攻城狮7号:个人主页
🔥 个人专栏:《AI前沿技术要闻》
⛺️ 君子慎独!
🌈 大家好,欢迎来访我的博客!
⛳️ 此篇文章主要介绍 WALL-OSS开源
📚 本期文章收录在《AI前沿技术要闻》,大家有兴趣可以自行查看!
⛺️ 欢迎各位 ✔️ 点赞 👍 收藏 ⭐留言 📝!
引言:当“大脑”学会思考,机器人才能走出实验室
2025年的具身智能赛道,一半是火焰,一半是海水。
火焰是资本的狂热和一次次惊艳的技术演示。我们看到机器人在视频里叠衣服、泡咖啡,似乎通用机器人的曙光就在眼前。海水则是产业落地的冰冷现实——大多数模型陷入了“过拟合演示”的怪圈,一旦走出实验室的特定环境,便寸步难行。
根本原因在于,打造一个真正通用的具身智能“大脑”,极其困难。它必须同时解决一个业界公认的“不可能三角”难题:模态的统一、动作的精度和能力的泛化。
就在此时,刚刚完成近10亿A+轮融资的“自变量机器人”,做出了一个让行业颇为震动的决定:将其核心具身智能基础大模型——WALL-OSS,进行彻底的开源。
这不只是一次寻常的技术发布,更像是一场宣言。它试图正面回答那个核心问题:如何让机器人不仅“会动”,更能“会思考”?WALL-OSS给出的答案,或许能为整个行业提供一块坚实的“起跑板”。
一、具身智能的“不可能三角”:机器人“大脑”的核心困境
要理解WALL-OSS的价值,我们必须先理解它试图攻克的难题——这个“不可能三角”,几乎是所有具身智能团队的噩梦。
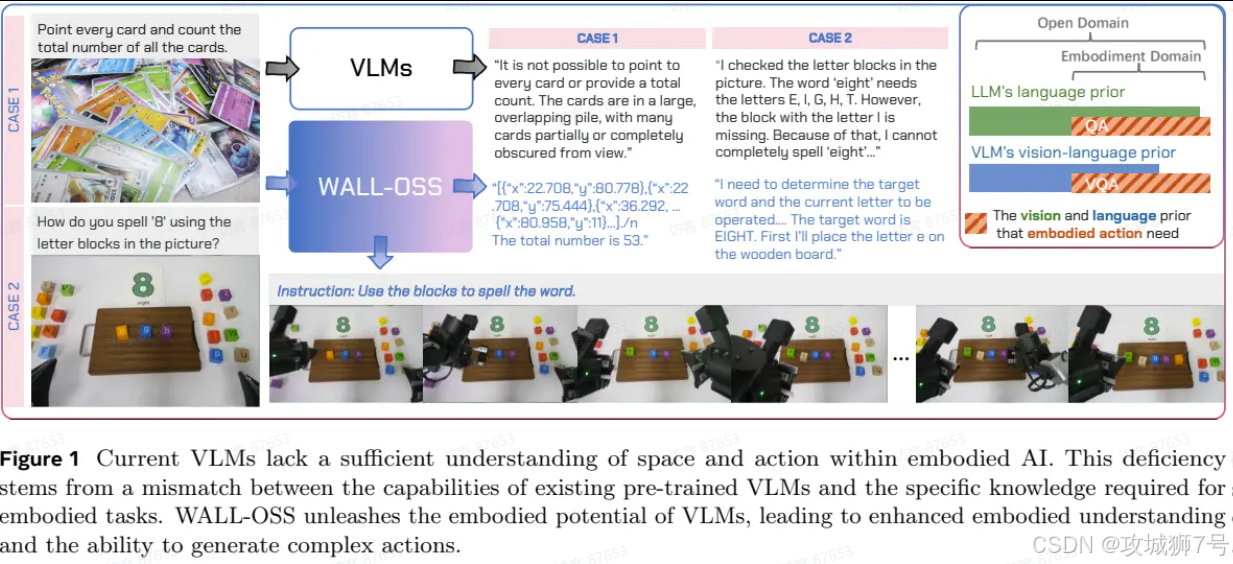
(1)模态统一 (Unified Modality):人类通过眼睛看、耳朵听、大脑思考、四肢行动,这是一个无缝融合的整体。但对机器人而言,如何将视觉(Vision)、语言(Language)、动作(Action)这三大模态真正统一在一个模型里,而不是简单地“拼接”在一起,是一个巨大的挑战。错误的融合方式,很可能导致模型在学习动作时,忘掉了原本强大的视觉和语言理解能力,即“灾难性遗忘”。
(2)动作精度 (Action Precision):再聪明的“大脑”,如果指挥着一双笨拙的手,也毫无用处。机器人需要能生成高频、连续、细粒度的物理动作,才能完成现实世界中的精细操作,比如拧瓶盖、插钥匙。这要求模型具备极强的物理世界理解和控制能力。
(3)能力泛化 (Generalization):这是区分“机器人”和“自动化机器”的关键。一个真正的智能体,应该将在厨房学会的“拿起杯子”的能力,泛化到卧室去“拿起遥控器”,而不是每个新场景、新物体都需要重新训练。它要求模型具备强大的推理和举一反三的能力。
过去,大多数模型只能在这三个顶点中取其一二,三者兼顾者寥寥无几。而WALL-OSS的出现,正是通过一系列系统性的创新,试图正面击碎这个三角困境。
二、WALL-OSS的四把重锤:如何系统性地破解难题?
WALL-OSS并非依赖某一项单点技术突破,而是像一位经验丰富的工程师,从架构、数据、训练范式等多个维度,进行了一整套组合创新。
2.1 第一锤:更聪明的“大脑”架构 —— “共享注意力 + 专家分流”
为了解决模态统一的难题,WALL-OSS首创了一种新颖的架构。我们可以用一个形象的比喻来理解它:
想象一个项目团队,有“视觉专家”、“语言专家”和“动作专家”。传统的做法可能是让他们各干各的,然后把报告汇总起来,效率低下且容易出错。而WALL-OSS的设计是:
(1)共享注意力(Shared Attention):建立一个中央会议室,让所有专家在这里共享信息、交叉讨论,确保每个人都对项目的整体情况有充分理解。这保证了视觉、语言、动作信息的高度融合。
(2)专家分流(Expert FFN):讨论结束后,每个专家回到自己的独立办公室,利用自己的专业知识高效处理特定任务。这保证了各个模态在融合的同时,不会互相干扰,保留了各自的专业性。
这种设计,既实现了深度融合,又有效避免了“灾难性遗忘”,让模型在学习复杂动作时,依然保持着顶级的视觉语言理解能力。
2.2 第二锤:运动员式的训练法则 —— “先启发,后融合”
拥有了好的架构,如何进行高效训练?WALL-OSS采用了一种类似培养顶尖运动员的两阶段训练策略。
(1)第一阶段:启发(Inspiration Stage):这个阶段不急于让机器人“动手”,而是先让它“动脑”。通过海量的“具身视觉问答”(Embodied VQA)等任务,让模型看着机器人在各种场景下的图片和视频,然后回答“机械臂在哪里?”“它下一步该做什么?”这类问题。这极大地增强了模型对物理空间、物体关系和任务流程的深层理解,为其打下坚实的感知和认知基础。
(2)第二阶段:融合(Integration Stage):在模型足够“聪明”之后,再开始教它具体的物理动作。这个过程也分两步:先冻结“认知脑区”,只训练“运动脑区”,让它专心学习动作控制;然后再将整个模型解冻,进行联合优化,实现“手脑协同”。
这种“先离散、后连续、再联合”的训练范式,确保了VLM强大的认知能力能够稳定、无损地迁移和扩展到物理动作上。
2.3 第三锤:贯穿物理世界的思维链 —— “统一跨层级CoT”
我们熟悉的大语言模型,可以通过“让我们一步步思考”(Let's think step by step)来进行逻辑推理。WALL-OSS则独创性地将这种“思维链(CoT)”能力,从纯文本世界扩展到了物理世界。
当WALL-OSS接收到一个复杂指令,如“把桌子上的水果放到篮子里”,它的思考过程是连贯且跨越多个层级的:
(1)高层推理(语言):“桌上有苹果和香蕉,篮子是空的,我需要先把它们都拿起来。”
(2)子任务规划(语言+视觉):“第一步,定位并拿起苹果。第二步,把苹果放进篮子。第三步...”
(3)底层执行(动作):生成一连串精确的、连续的机械臂控制指令,完成“拿起苹果”这个动作。
这个过程在一个统一的、端到端的模型内无缝完成,避免了传统多模块系统之间因信息传递造成的误差累积。这正是WALL-OSS能够胜任长程、复杂任务,并展现出强大推理和泛化能力的关键。
2.4 第四锤:源于真实世界的“养料” —— 高质量真机数据
“闭门造车”无法造出能在真实世界行动的机器人。自变量团队从一开始就坚持以真实世界数据为主要训练来源,并为此自建了大规模数据采集工厂。
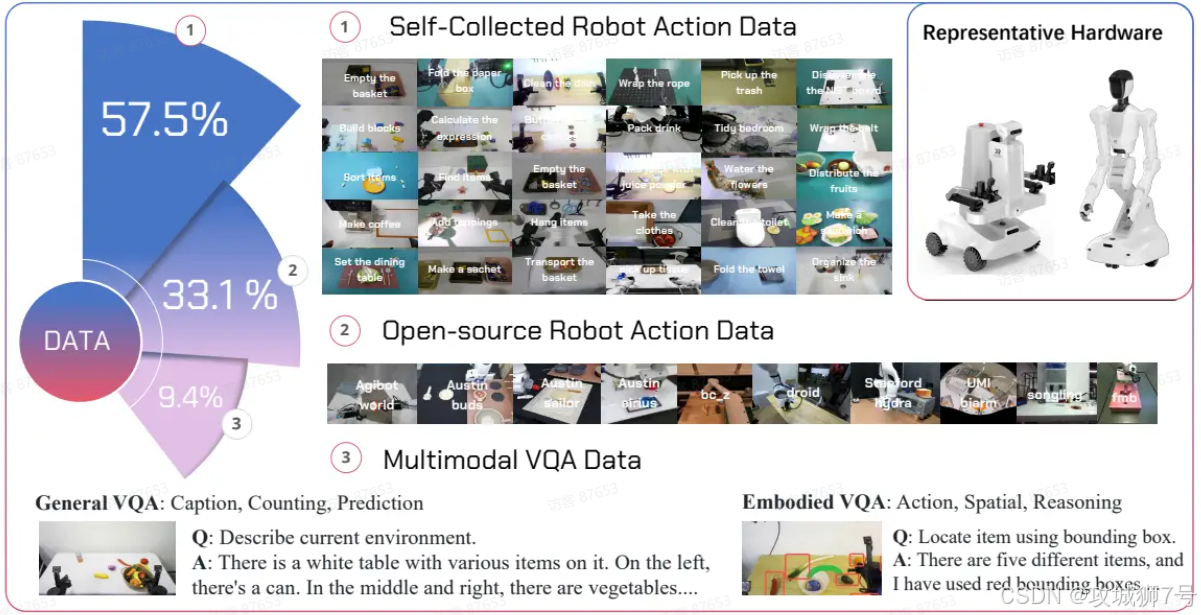
相比于仿真数据,高质量的真机数据包含了物理世界中无穷的细节、噪声和不确定性。用这样的数据“喂养”出的模型,其鲁棒性和对现实世界的适应能力,远非纯仿真模型可比。
三、“真开源”的魄力:为行业铺设一条高速公路
如果说技术创新是WALL-OSS的“肌肉”,那么彻底的开源就是它的“胸怀”。
在具身智能领域,开源并不罕见,但很多所谓的“开源”更像是“开放日”,开发者下载后发现,要么跑不起来,要么缺少关键代码,要么需要特定的昂贵硬件。
WALL-OSS的开源则显得诚意十足:
(1)完整方案:开放了包括预训练模型权重、完整的训练和推理代码、数据集接口,甚至附带了详细的部署文档。
(2)低门槛:开发者仅需RTX 4090级别的消费级显卡,就能完成从训练到部署的全过程,这极大地降低了中小团队和科研人员的进入门槛。
(3)高兼容性:模型可以快速微调,适配到不同公司的机器人本体上,真正做到“一个大脑,多种身体”。
自变量团队的目标很明确:他们不希望每个入局者都把大量时间和资源浪费在“造轮子”上。通过提供一个强大、通用、开箱即用的能力基座,WALL-OSS希望让整个行业都能站上一个更高的起点,专注于场景创新和应用落地。
结论:一个值得期待的“安卓时刻”
WALL-OSS的出现,连同其背后的系统性思考和彻底的开源战略,为混沌的具身智能赛道注入了一股清流。它证明了,“不可能三角”并非牢不可破,通过严谨的工程学方法可以实现系统性的突破。
在行业普遍流传着“硬件看宇树,大脑看自变量”的说法时,自变量机器人通过开源WALL-OSS,展现了其作为“大脑”厂商的格局和远见。它所做的,不仅仅是发布一个模型,更是在为整个行业铺设基础设施。
这或许就是具身智能领域的“安卓时刻”——一个强大、开放、通用的底层操作系统已经出现,无数创新的上层应用,正等待着被开发者们创造出来。而这场通往通用机器人的长跑,也因此变得更加值得期待。
更多详情:
Huggingface:
https://huggingface.co/x-square-robot
GitHub:
https://github.com/X-Square-Robot/wall-x
项目链接:
https://x2robot.com/en/research/68bc2cde8497d7f238dde690
论文链接:
https://x2-robot.feishu.cn/file/FurYbuThcofkOqxrsy7cnzUbndd
看到这里了还不给博主点一个:
⛳️ 点赞☀️收藏 ⭐️ 关注!
💛 💙 💜 ❤️ 💚💓 💗 💕 💞 💘 💖
再次感谢大家的支持!
你们的点赞就是博主更新最大的动力!