自动驾驶中的传感器技术44——Radar(5)
本文介绍车载毫米波雷达的开发测试验证实例
1、台架测试
雷达波形配置验证
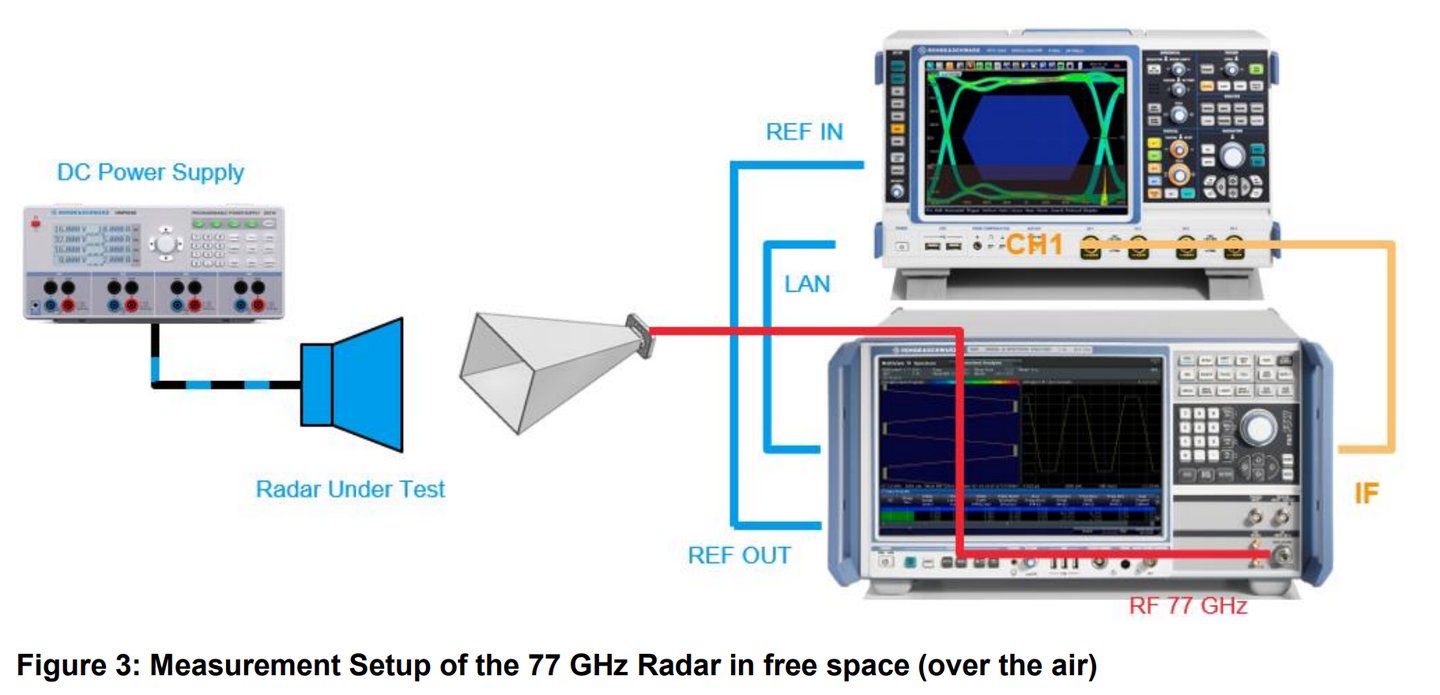
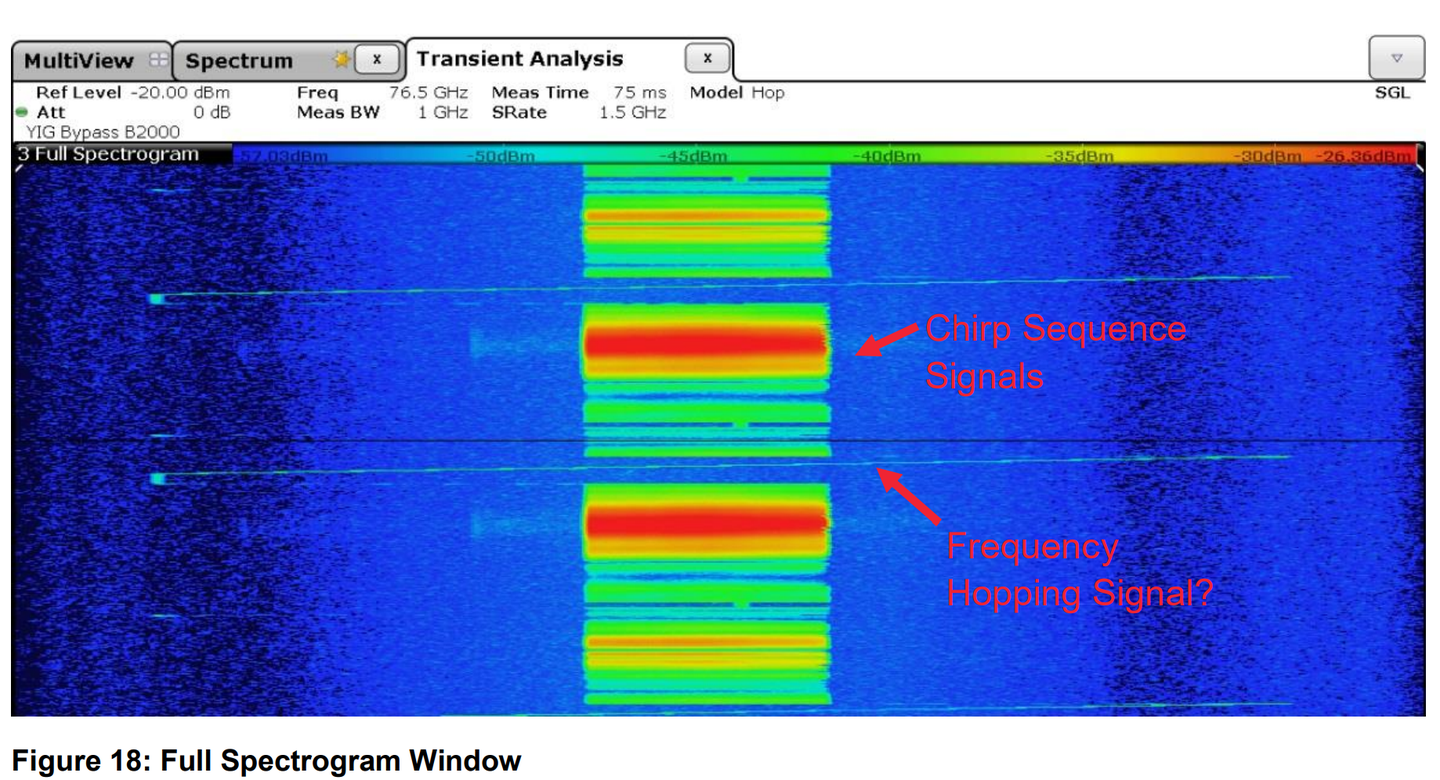
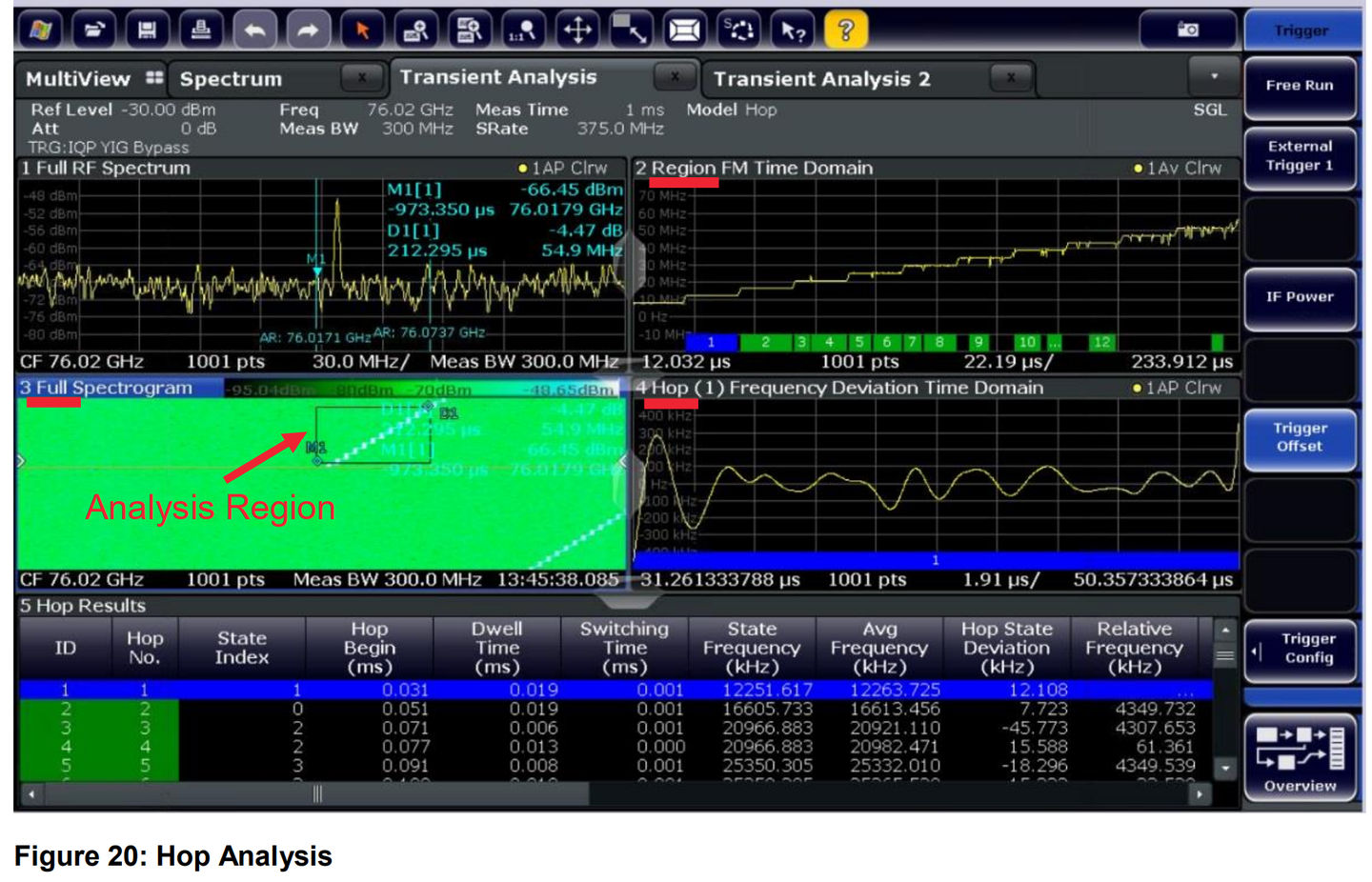
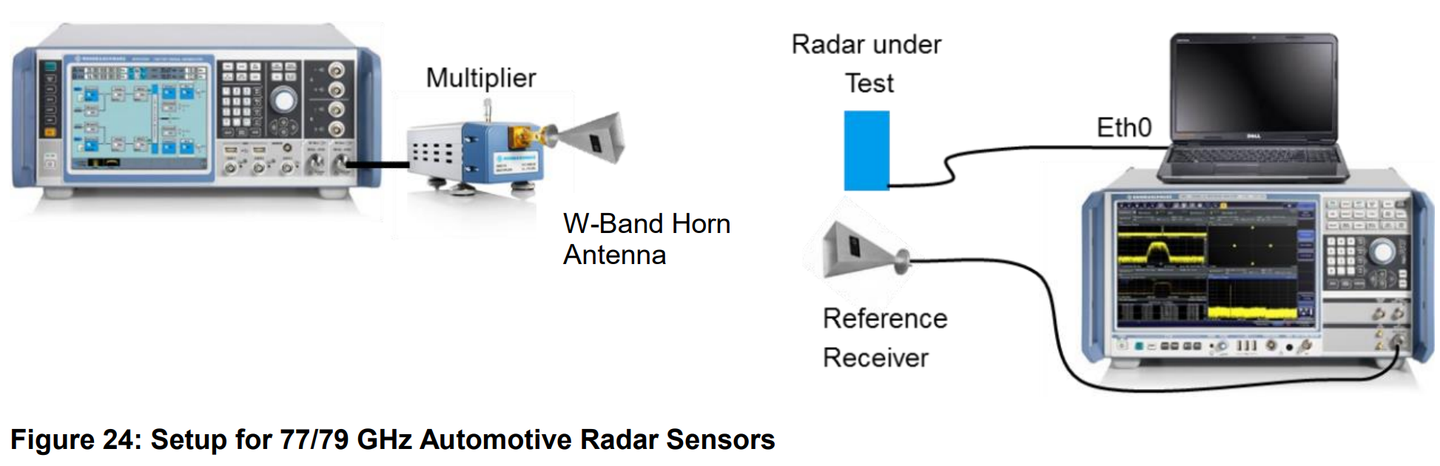
在车载毫米波雷达开发阶段,最重要的就是雷达波形的配置与验证了,有两种方法可以使用。一种是无线 (OTA) 设置,即没有同轴电缆连接;另一种是有线设置,即在 RUT 和 FSW 信号与频谱分析仪之间有合适的同轴电缆。 下文描述的设置假设一个远距离雷达收发器,它使用 W 波段喇叭天线通过无线 (OTA) 传输信号。该设置使用带有瞬态分析选件(FSW-K60C/H,线性调频和跳频分析)和宽带信号分析选件 (B2000) 的 FSW85 信号与频谱分析仪。
雷达抗干扰能力测试
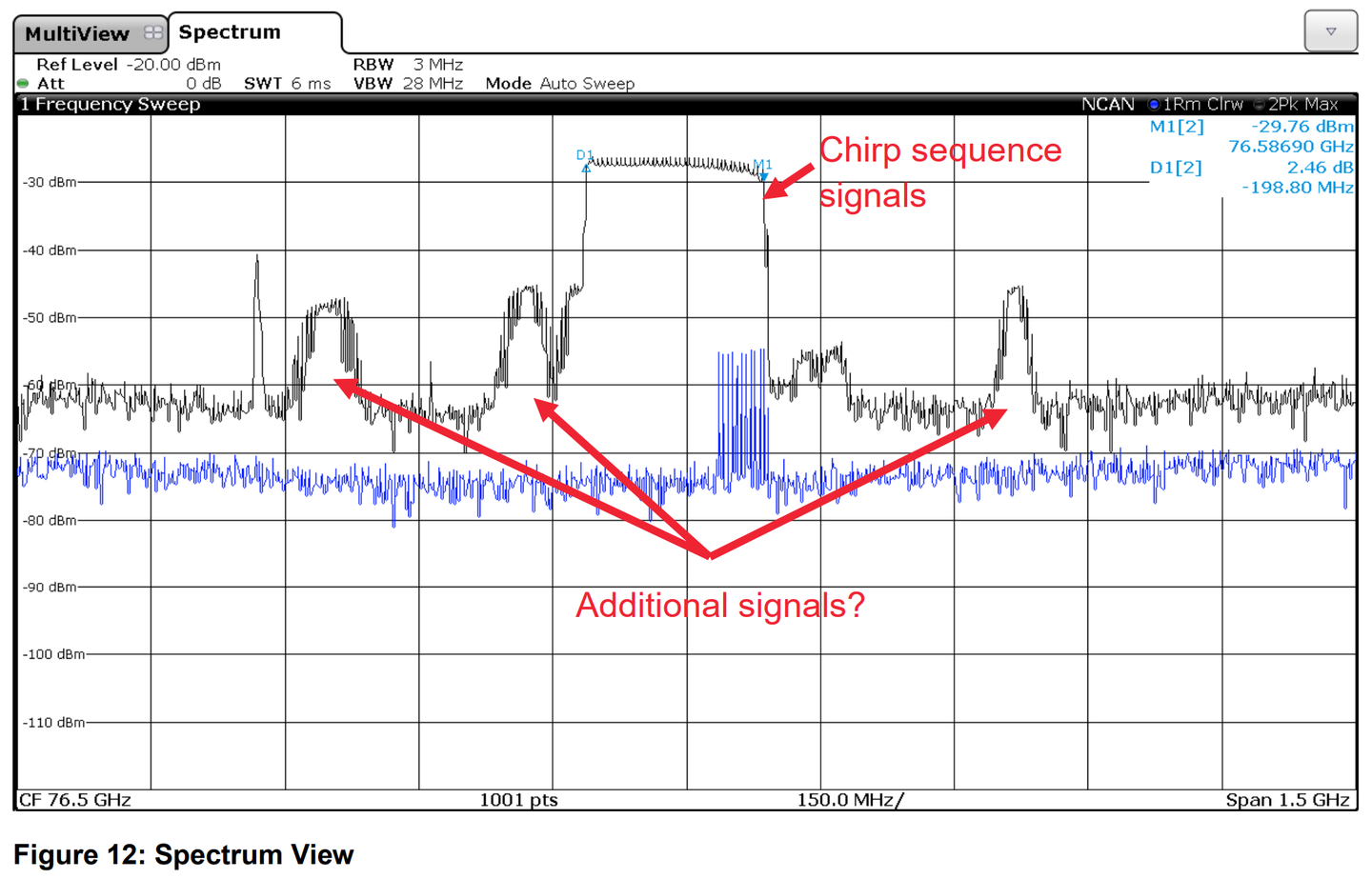
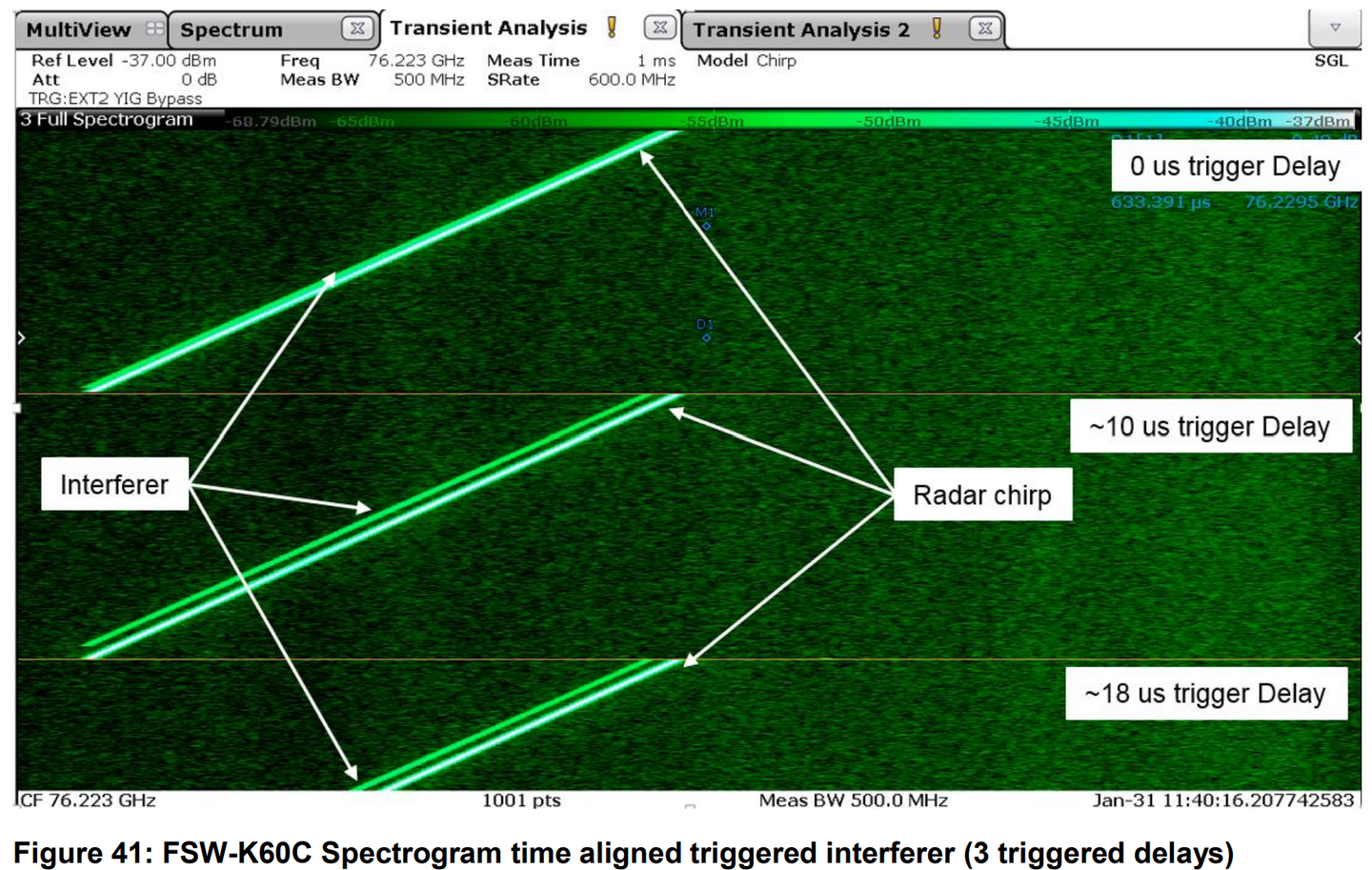
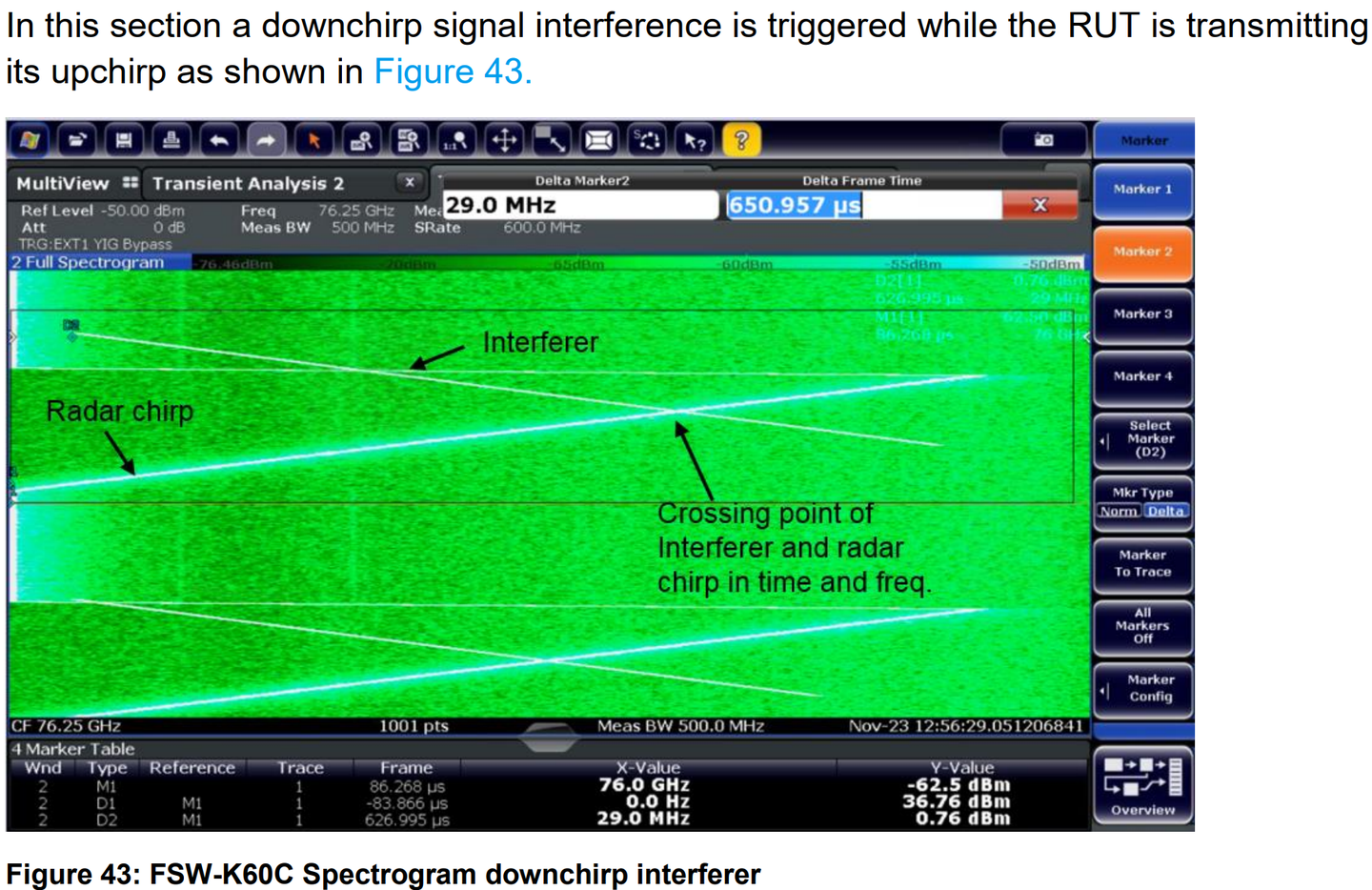
由干扰引起的目标被称为Ghost Target。顾名思义,Ghost Target实际上并不存在,但在雷达输出端看起来就像真实目标一样。这可能是由于发射信号的近似副本造成的,而该副本实际上并非来自雷达自身的发射器,而是落入了接收“窗口”。要发生这种情况,两个或多个雷达之间的时序、波形和频率必须非常匹配,并且接收到的“视在回波”功率必须超过一定限度。
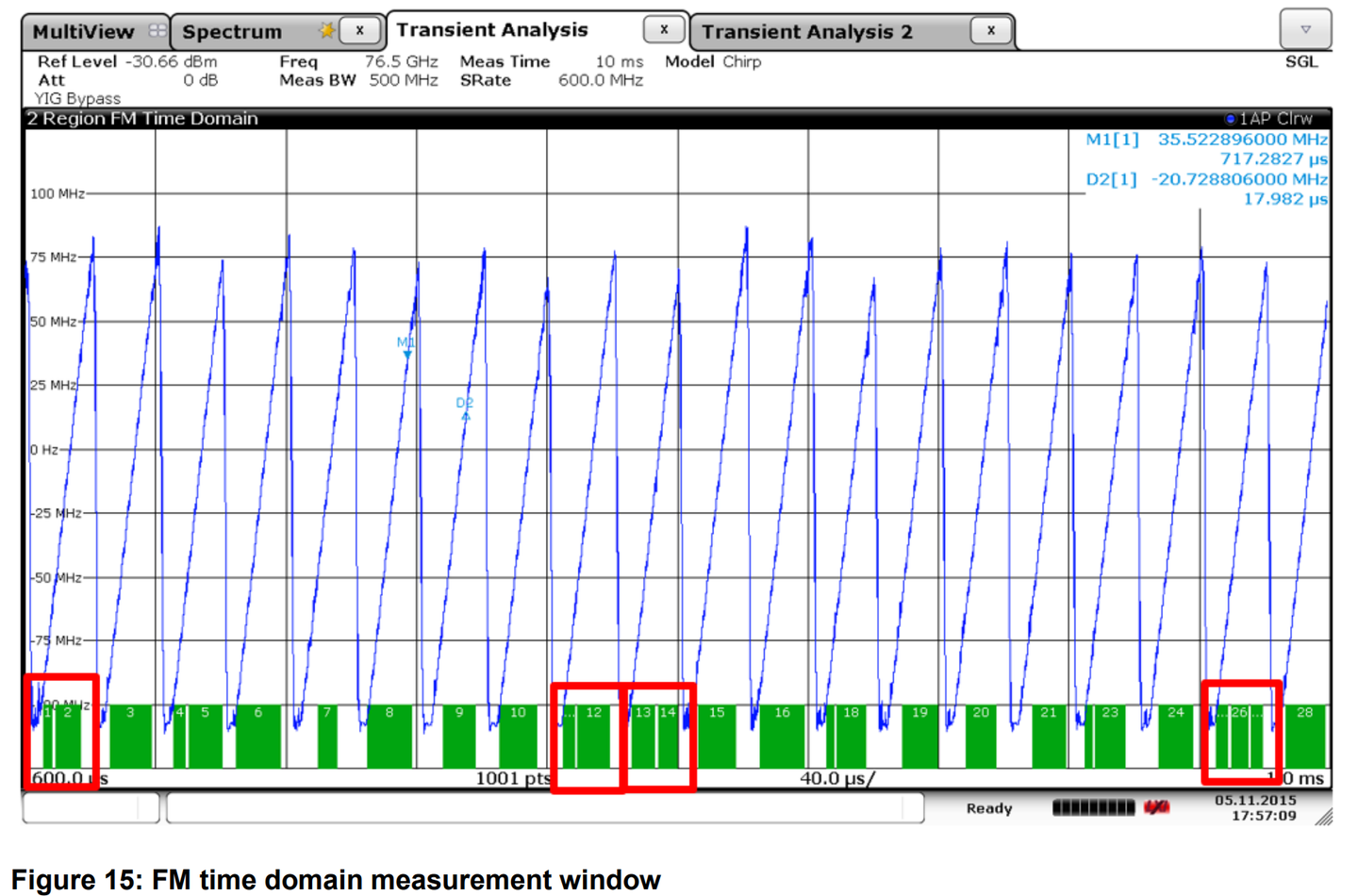
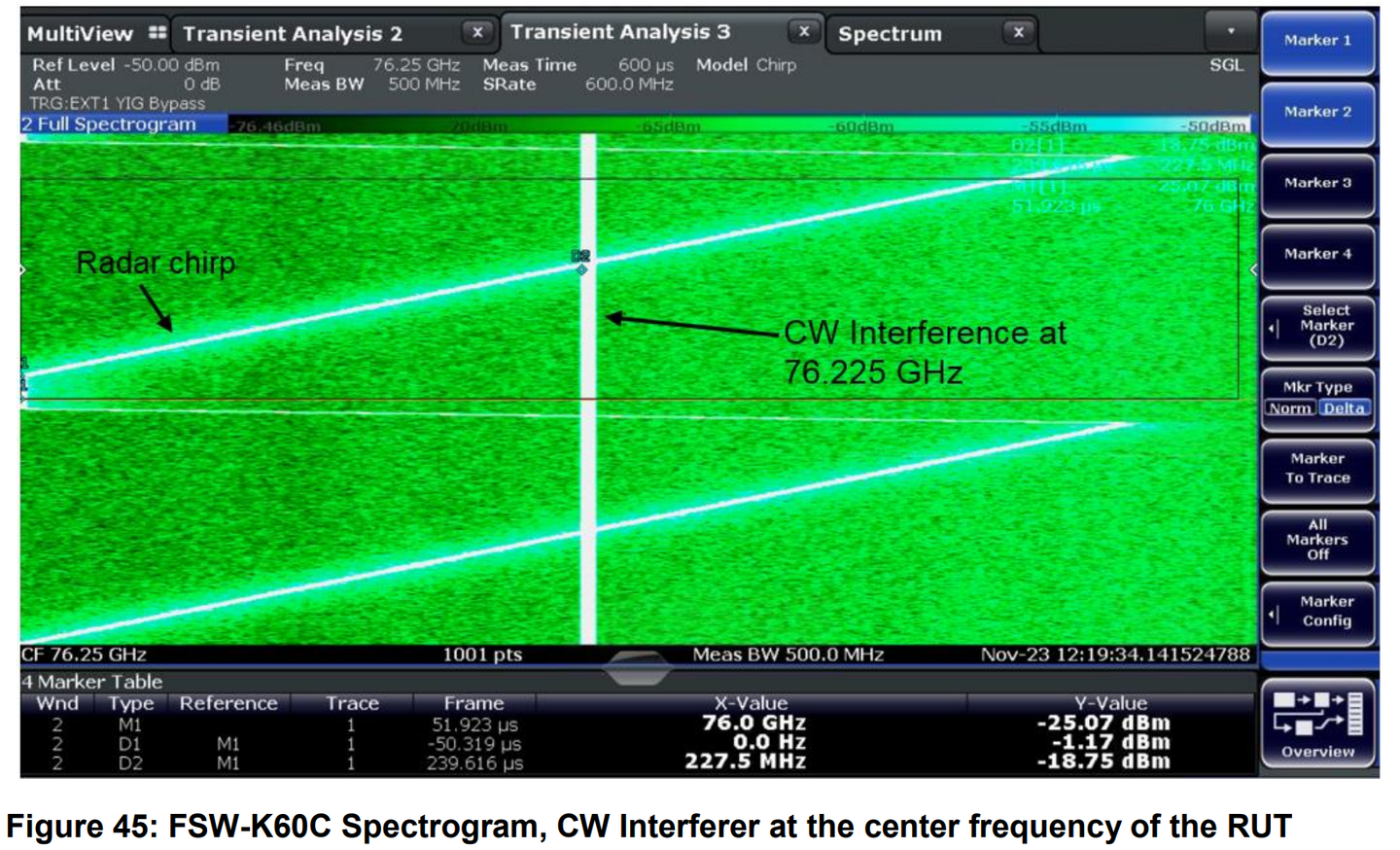
高功率宽带连续波信号,或具有一定功率且落入接收机带宽的宽带连续波类噪声信号,可能会增加雷达的本底噪声,并降低目标的信噪比 (SNR)。这可能会导致雷达散射截面 (RCS) 较小的目标由于其回波信噪比降低而消失。为了实现这种情况,必须发射连续的宽带类噪声信号,或任何其他经过 FFT 信号处理后在所有频率上扩展且信号功率较高的信号。当汽车雷达传感器采用 CS(线性调频序列,快速调频连续波)波形时,测试其相互干扰就显得尤为重要。由于 CS 中的线性调频频率较高,因此测量目标的拍频远高于同类慢速调频连续波雷达(MHz vs. kHz)。这也是为什么需要提高采样率和滤波器带宽的原因,而这反过来又会导致更容易产生干扰。一种降低干扰的方法是结合慢速 FMCW 和 Chirp 序列波形,以便在存在相互干扰的情况下测量雷达回波信号。
通过以上测试可以验证雷达的波形设计(如编码波形)是否具有足够的鲁棒性。
矢量信号发生器SMW用于生成不同类型的干扰信号。与SMZ90倍频器配合使用,将窄带信号倍频至50 GHz以上载波频率的所需带宽。
a) 信号带宽为160 MHz的加性高斯白噪声 (AWGN),可由SMW自行生成(仅适用于24 GHz雷达)。
b) 脉冲序列发生器软件SMW-K300生成的宽线性调频信号,然后上传至SMW的任意波形发生器(适用于24 GHz、77 GHz和79 GHz雷达)。
c) 不同频率的连续波信号
Ref:https://scdn.rohde-schwarz.com/ur/pws/dl_downloads/dl_application/application_notes/1ma267/1MA267_1e_automotive_Radar.pdf
2、暗室测试
天线测试
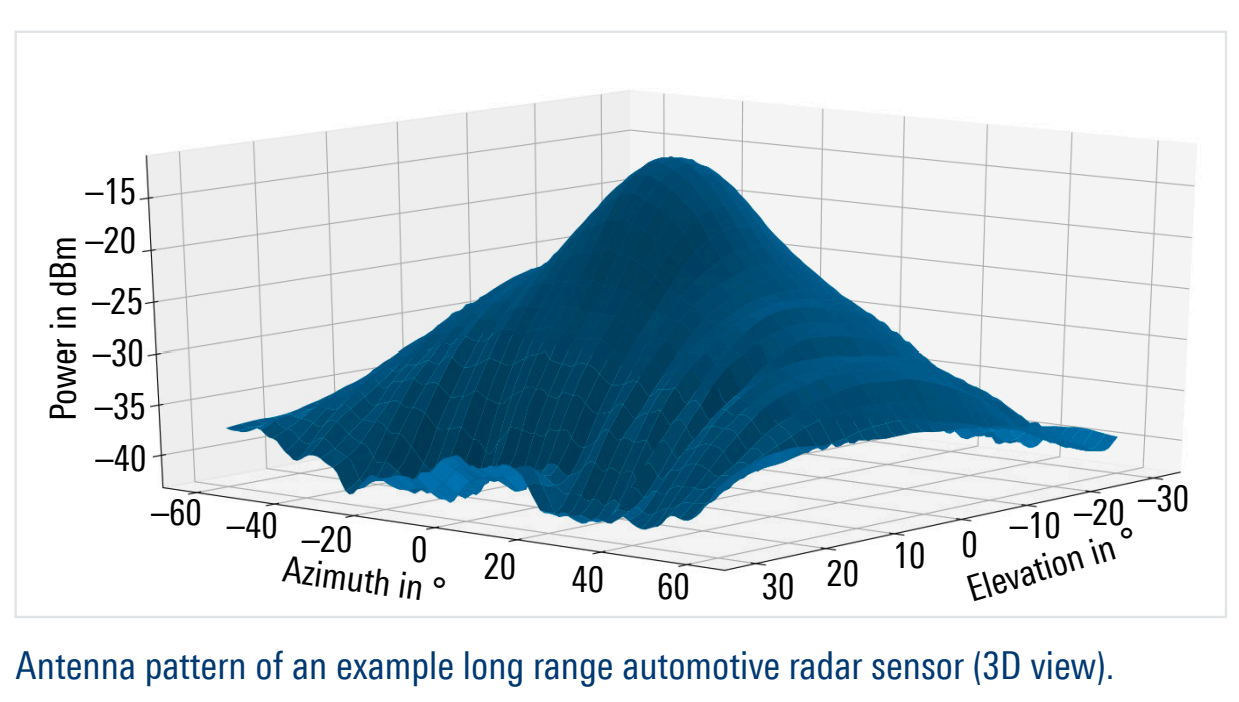
天线方向图是汽车电子雷达在开发和验证过程中需要测量的关键特性。通过天线方向图,可以推导出许多特性,包括半功率波束宽度 (HPBW)、峰旁瓣比 (PSLR)、天线增益和灵敏度。
为了获得准确、确定和可靠的测量结果,必须满足远场条件。随着越来越多的汽车电子雷达工作在 79 GHz 频率下,孔径尺寸达到或超过 15 厘米,这一条件越来越难以满足,因为测量距离至少需要 12 米。
另一个缺点是,以高分辨率测量完整的 3D 天线方向图非常耗时。不仅测量过程耗时长,测量设置和确保所有组件正确对准也需要耗费大量时间。
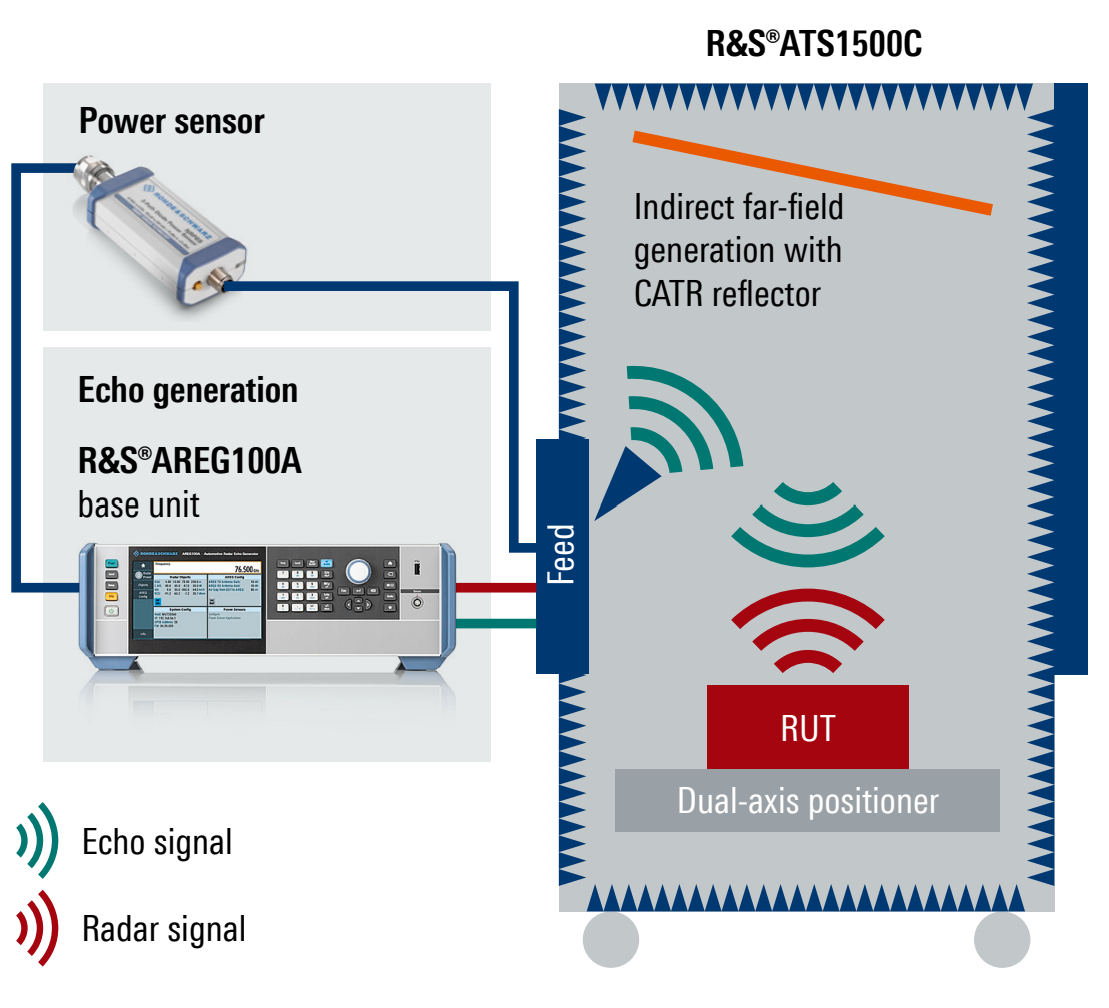
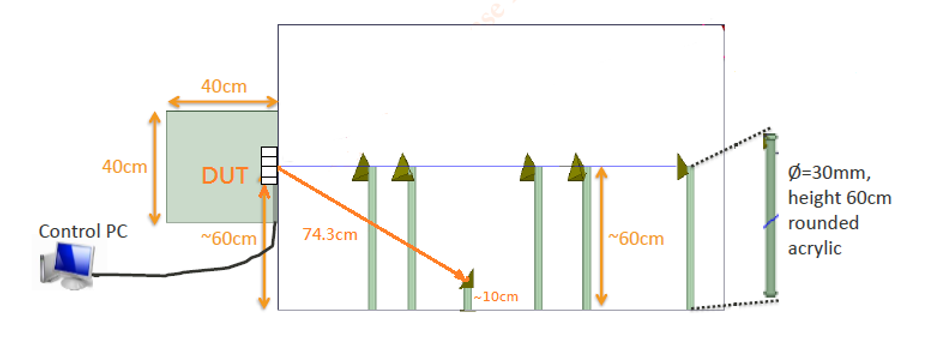
下图系统由一个用于汽车雷达传感器的 R&S®ATS1500C 天线测试暗室、一个 R&S®AREG100A 汽车雷达回波发生器和一个 R&S®NRP8S 三路径二极管功率探头组成。这套简单的装置可提供满足远场条件的高质量天线方向图测量。R&S®ATS1500C 天线测试暗室包含一个优质的 CATR 反射器,可提供较大的静区,使设置变得简单快捷,因为被测设备的微小位置变化不会影响 CATR 中的测量结果。该暗室可容纳孔径最大为 30 厘米的汽车雷达,并且可以使用高动态范围功率探头通过 R&S®AREG100A 的校准路径测量天线方向图。
得益于 3D 倾斜-倾斜定位器,被测雷达 (RUT) 的天线极化始终与馈源天线极化保持一致。这使得高速天线方向图测量不会对质量造成任何影响。
Ref:https://scdn.rohde-schwarz.com/ur/pws/dl_downloads/dl_application/pdfs/Measuring-antenna-patterns_ac_en_3608-5229-92_v0100.pdf
雷达模拟器

R&S®AREG100A 汽车雷达回波发生器是一款智能且强大的解决方案,适用于在生产过程中测试汽车雷达传感器。其突出的关键特性包括:
● 远程前端支持高达 4 GHz 的信号带宽和不同的频率,例如 24 GHz 至 24.25 GHz、76 GHz 至 77 GHz 和 76 GHz 至 81 GHz
● 最多可同时模拟四个物体
– 最多三条可独立切换的路径,用于模拟 5 米至 300 米的固定物体距离
– 一条额外的可切换路径,用于 4 米的固定短物体距离(包括 0.8 米的空气间隙)
● 每条路径的幅度均可独立控制
● 前端可选单天线(最适合测试 MIMO 雷达)或双天线(Rx/Tx 路径之间隔离度最佳)
● 可选多普勒频偏,用于模拟径向速度
Ref:https://scdn.rohde-schwarz.com/ur/pws/dl_downloads/pdm/cl_manuals/user_manual/1178_7417_01/AREG100A_User_Manual_en_08.pdf
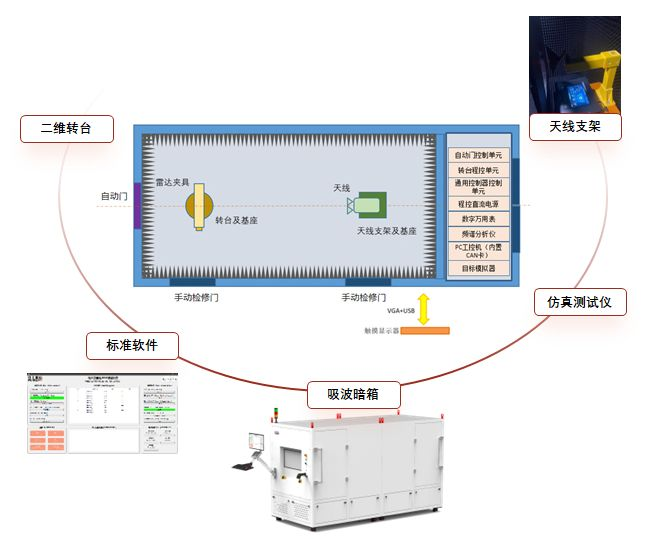
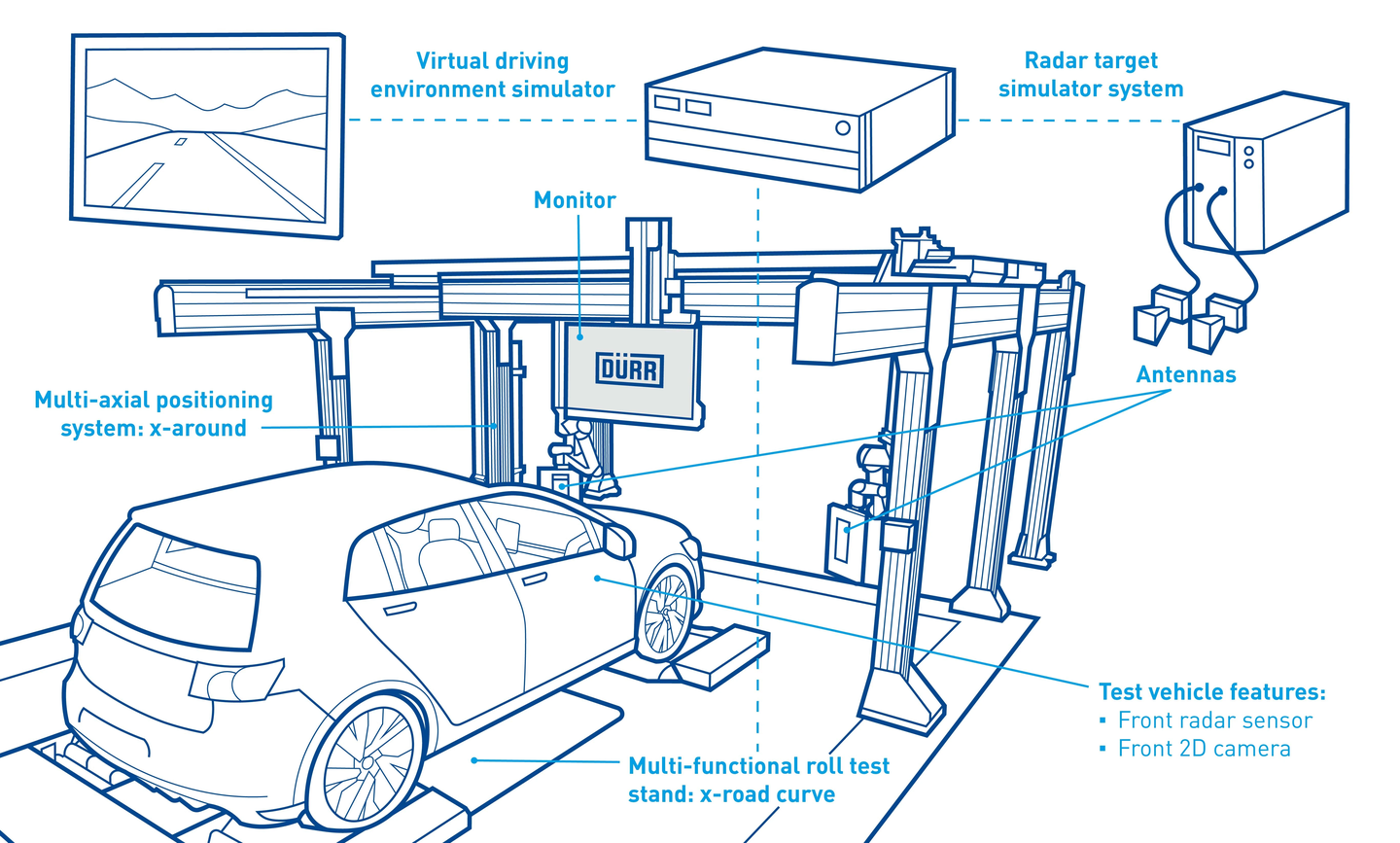
NI也提供类似的系统如下
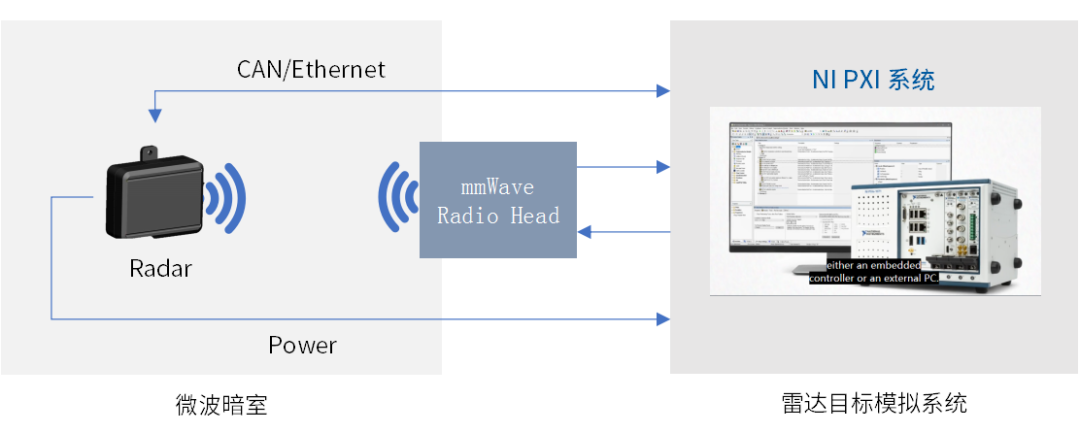
整套测试系统可以实现原至300米的目标距离仿真,±100m/s的目标速度仿真,±90°的目标角度仿真。
可以评估雷达在以上范围内的测距测速能力。
雷达角反射器
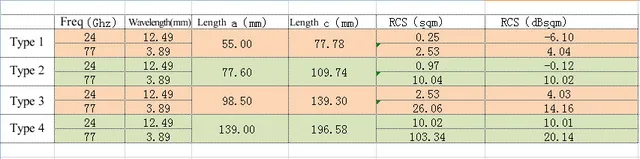
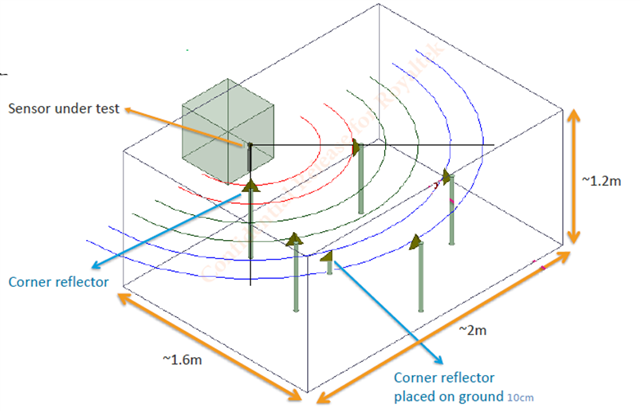
如上图所示,多个角反可以在对雷达的距离以及距离分辨率,角度以及角度分辨率进行测试评估。
3、校准(EOL Calibration)
Radar产线校准
毫米波雷达生产自动化测试系统用于对车载毫米波雷达进行EOL下线标定与功能指标检测,系统具有功能齐全、自动化程度高、测试速度快等特点。
测试功能范围:
a) 标定校准:雷达幅度、相位标定校准;
b) 功能测试:目标距离、角度、速度等方便的识别能力和精度测试;
c) 射频测试:天线方向图、EIRP、辐射功率、功率平坦度、有效贷款等;
d) 电气测试:工作电压、电流;休眠电压、电流。
整车产线校准
Ref:https://news.eeworld.com.cn/qrs/ic616221.html
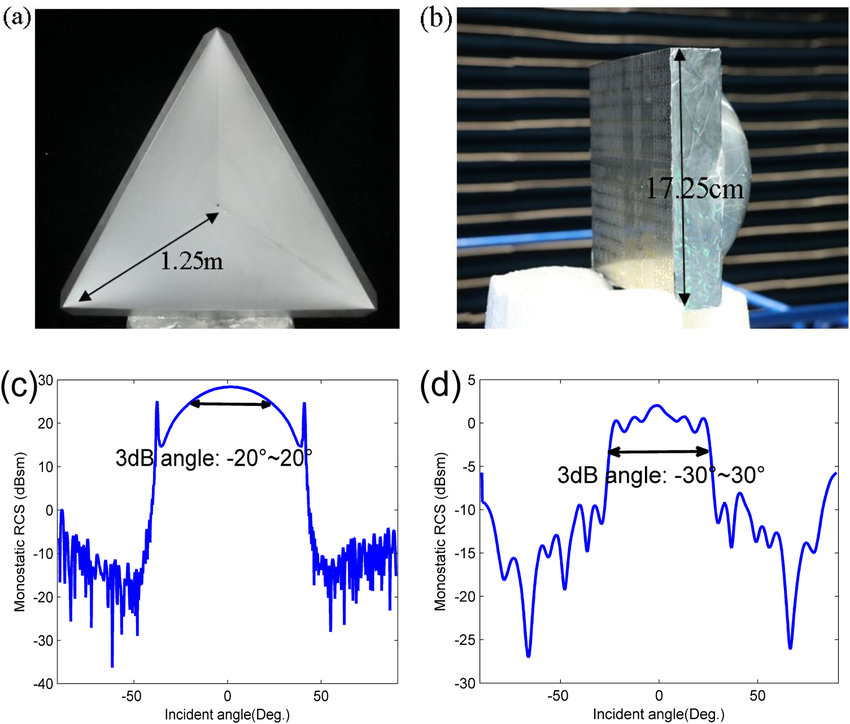
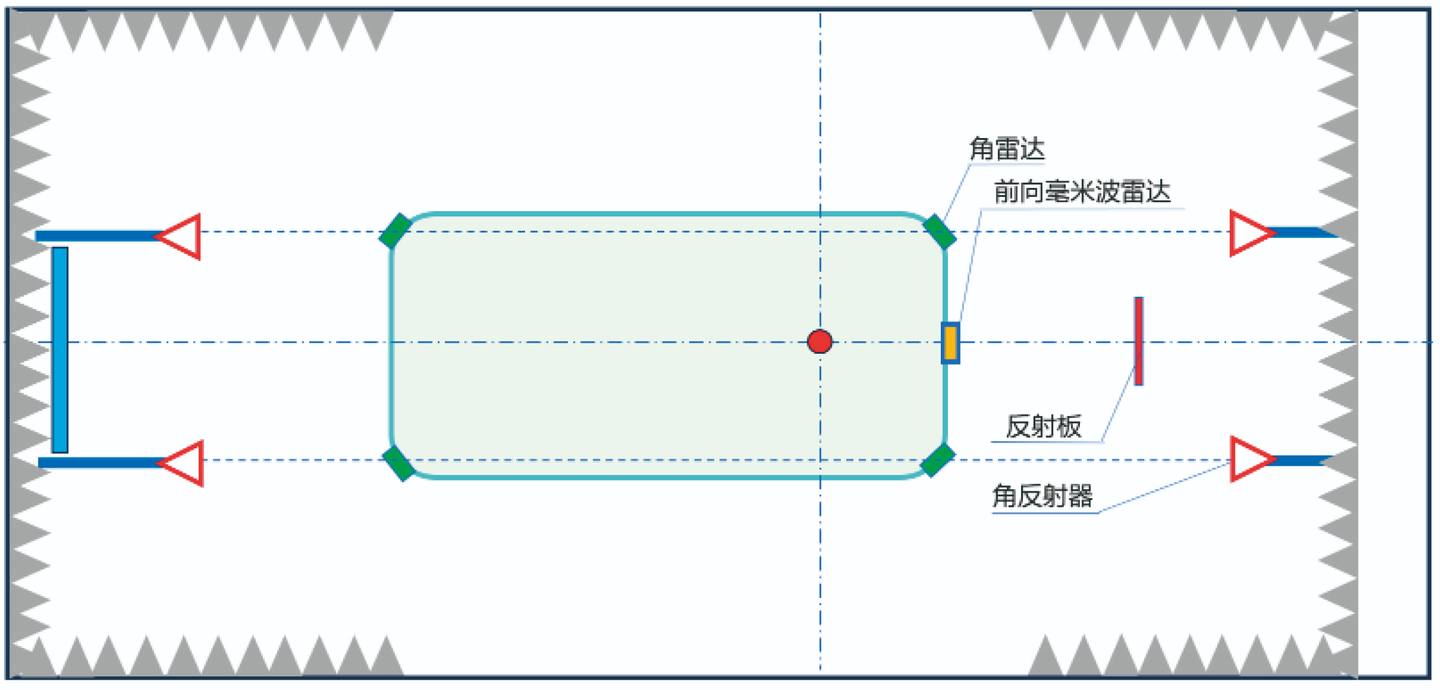
毫米波雷达主要涉及前向毫米波雷达和四角毫米波雷达,其中,前向毫米波雷达标靶采用反射板的型式,角毫米波雷达标靶型式采用角反射器,同时,需要考虑对雷达干扰避免区内的金属类强反射物通过建立吸波墙等方式进行防护,以保证雷达标定准确性及成功率,吸波墙高度应在雷达垂直FOV探测范围基础之上,留有足够余量,以确保防护有效性。
Ref:https://auto.jgvogel.cn/c1428539.shtml
此外还有整车在道路行驶过程中的自动校准,这里不再进行详细论述。
4、整车测试
这里主要涉及到的是ENCAP和雷达相关的功能规范测试验证。
VRU
Ref:https://cdn.euroncap.com/media/58226/euro-ncap-aeb-vru-test-protocol-v303.pdf
以及各种Radar在实际ADAS功能项目测试中应用到的项目要求(Car、Bicycle,锥桶、三脚架等等)。
后续还有《智能网联汽车组合驾驶辅助系统安全要求》,里面涉及到了很多对Radar强需求的场景,也是需要在整车测试中进行的。
Ref:雪岭 · 7类最极端场景——最新智驾安全强制标准分析