人形机器人重复定位精度:工业柔性制造的“定海神针”
在智能制造不断走向深水区的今天,“柔性”已成为衡量产线能力的关键指标。而实现真正意义上的柔性制造,离不开一项核心性能指标——人形机器人重复定位精度。它不仅关乎机器能否“准确操作”,更直接影响到整条产线的可靠性、协同性与自适应能力。

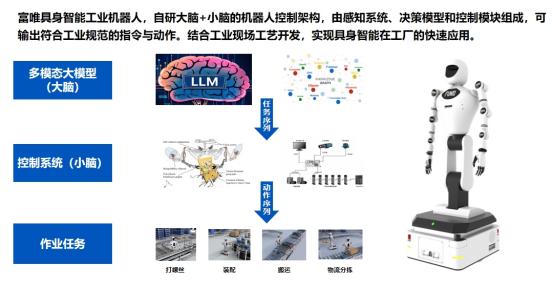
富唯智能凭借知识驱动的具身智能工业机器人技术框架,正在重新定义人形机器人重复定位精度的标准。该框架融合自研一体化关节控制器、零代码编程系统与任务规划大模型GRID,构建出包括大脑、小脑、躯干、世界模型和虚实融合仿真器在内的“五大核心模块”,为机器人提供从感知到执行的全程高精度闭环控制。
在实际应用中,人形机器人重复定位精度是实现“一机多能”与多机协同的基石。以富智1号装配人形机器人为例,其凭借轮式结构与折叠升降设计,结合GRID大模型对环境语义与任务知识的深度融合,即使在动态变化的工厂场景中,仍能保持毫米级精密装配的稳定性,显著提升了在3C电子、半导体等行业复杂装配任务中的适应能力。

同样地,富智2号转运人形机器人依托高度泛化的操作规划和一体化控制系统,展现出卓越的人形机器人重复定位精度。无论是在汽车物流中的物料搬运,还是在CNC加工间的工件上下料,它都能快速、精准地调整作业高度与路径,实现长周期、多序列任务的可靠执行。

值得一提的是,该精度能力并非仅靠硬件实现。GRID工业级大模型深度融合语义地图与知识图谱,使机器人能够“理解”环境、“记忆”工序、“预测”偏差,从而实现真正意义上的智能纠偏与精准执行。这种软件定义精度、系统保障稳定的路径,正是富唯智能解决方案在多个行业成功落地的关键。

可以看出,人形机器人重复定位精度已不再是一个孤立的性能参数,而是集成感知、决策、控制与仿真的系统级能力体现。随着工业场景对柔性制造的需求日益提升,高重复定位精度将成为人形机器人真正赋能“无人化车间”的核心竞争力——它不仅决定了机器人能否“做得对”,更决定了整个产线能否“做得快、换得勤、适应得好”。