告别“盲操作”!Uskin阵列式三轴力触觉传感器:触觉型灵巧手提升科研精度,触觉型夹爪保障产线效率,多场景痛点一次解决
在机器人迈向自主操作的道路上,视觉之外的触觉感知正成为关键突破口。XELA Robotics公司的阵列式三轴力触觉传感器Uskin,凭借其高密度、三轴力测量与易集成特性,正加速推动机器人从“盲抓”到“手感操作”的跨越,为诸多行业与领域带来了创新性集成方案。

XELA Uskin 让机器人真正“有感觉”地工作
解锁新感知!Uskin三轴阵列式触觉传感器,让机器人“手感”超神!
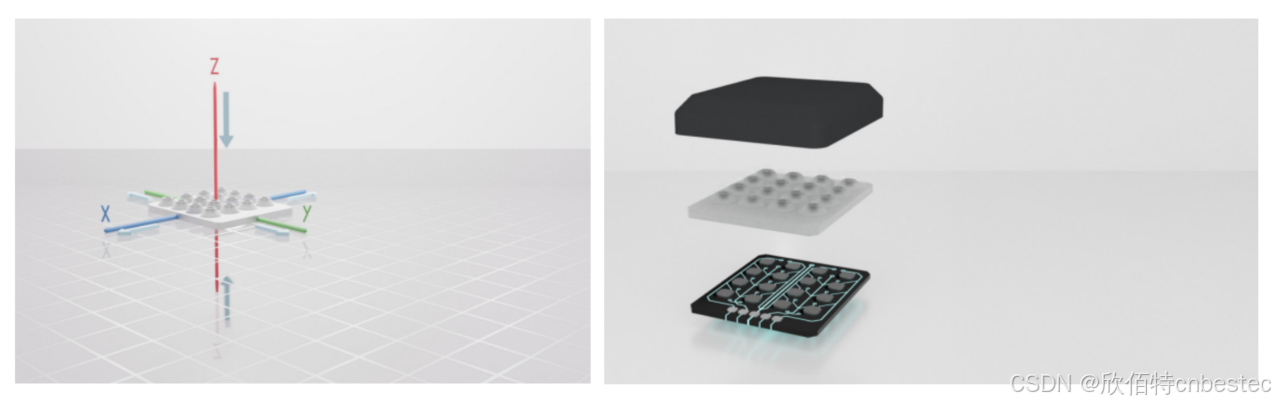
工作原理:基于磁性原理感知磁场变化捕捉接触力(高灵敏度、快响应),结合空间位移测量检测力致位移变化解析触觉信息;柔性阵列设计与优化算法提升动态任务处理效率。
核心特性:
①高密度设计:单位面积内可集成更多传感单元,提升感知精度,支持精细操作与复杂导航;
②三轴力测量:多维度力信息增强灵活性;
③轻薄柔软:仅5.5mm厚,布线精简,易集成,提升机器人安全性与适应性,降低成本,应用广泛。
产品矩阵:

XELA Uskin三大集成方向,一张图看懂!

XELA阵列式三轴力触觉传感器Uskin的集成方案,可归纳为三条主线,全面适配科研与工业需求:
- 触觉型灵巧手:赋予机器人“指尖智慧”
- 以Allegro Hand V4 四指灵巧手为代表,整手覆盖高密度触觉阵列。
- 触觉型夹爪:让通用夹爪“感知”物体,实现夹取力自适应控制
- 广泛适用于Robotiq二指夹爪、SCHUNK、Weiss、Onrobot等主流平行夹爪,即插即用。
- 定制型指尖触觉:满足多种个性化需求,提高设备在特定场景下的作业能力
- 针对特殊工况,提供可裁剪、可封装、双面的柔性指尖模块。

XELA阵列式三轴力触觉传感器Uskin集成方案,不仅是硬件升级,更是机器人从“执行者”向“感知-决策-执行”闭环迈进的关键一步。

从实验室的Allegro Hand V4,到产线的Robotiq二指夹爪,再到田间的柔性指尖,Uskin三轴力触觉传感器让机器人拥有“类人触觉”,推动精密装配、仓储物流、农业采摘、人机交互等场景迈向更安全、更高效、更柔性的未来。
在接下来的文章中,会带大家详细解读——Uskin传感器三大集成方案的优势和强大应用实力,请大家敬请期待!