三维仿真软件中渲染层面的孔洞优化方法调研
一、引言:为什么要在渲染层面优化孔洞?
在工业制造与数字仿真不断融合的今天,三维仿真软件已经成为机床制造、汽车工程、航空航天乃至数字孪生平台的关键组成部分。从最初的 几何设计与CAD制图,到后续的 可视化仿真与交互展示,再到如今元宇宙和工业互联网中的 沉浸式交互与实时渲染,对三维模型的渲染性能要求越来越高。
然而,在这些精密的工业模型中,有一类微小但数量庞大的几何特征,往往成为渲染环节的“隐形杀手”——孔洞。
这里的孔洞不仅指常见的圆孔,还包括:
螺纹孔:带有螺旋曲面的高精度细节;
沉头孔:孔口有倒角、沉孔,几何曲面复杂;
紧固孔:用于螺栓、螺钉装配,常成阵列分布;
工艺孔:为减重、通气或加工工艺设置,数量众多。
在实际制造中,这些孔洞具有极高的重要性:它们是装配基准,是工艺控制的关键点,是零件功能能否实现的保障。
但在 渲染层面,孔洞却带来了一系列问题:
三角片数量激增
CAD 模型导入仿真软件时,孔洞特征会被离散化为大量三角形。
一个带螺纹的孔可能就包含成百上千个三角形,成千上万个孔叠加后,网格面数呈指数增长。
以下是一个估算孔洞三角形数量脚本import mathdef tris_for_hole(radius_mm=10.0, delta_l_mm=0.1, axial_segments=2, threaded=False):# 圆周细分circum_div = max(8, int((2*math.pi*radius_mm)/delta_l_mm))k = axial_segmentsif threaded:# 粗略把螺纹影响折算为额外细分倍率k *= 6return circum_div * k# 示例:20mm 孔,0.1mm 精度,带螺纹 print("Tris (threaded):", tris_for_hole(radius_mm=10.0, delta_l_mm=0.1, axial_segments=3, threaded=True)) # 示例:20mm 孔,0.3mm 精度,无螺纹 print("Tris (plain):", tris_for_hole(radius_mm=10.0, delta_l_mm=0.3, axial_segments=2, threaded=False))
渲染性能下降
GPU Pipeline 需要处理更多顶点与像素,draw call 数量急剧增加。
在复杂机床模型中,单个场景往往超过千万级三角形,对实时交互极为不友好。
视觉收益有限
在远距离观察时,孔洞几乎不可见,但仍然会被完整渲染。
用户无法感知这些细节,却白白消耗了宝贵的GPU算力。
交互体验受损
在数字孪生或装配仿真中,用户需要实时旋转、缩放、拆装模型。
如果孔洞过多导致帧率从60FPS下降到20FPS,体验会明显卡顿,甚至影响训练或展示效果。
换句话说,孔洞是制造必须、但渲染讨厌的存在。
因此,如何在不改变原始CAD数据、保证工程准确性的前提下,在渲染层对孔洞进行“轻量化处理”,就成为一个迫切而有价值的研究课题。
在游戏行业,类似的优化问题早已存在:远处建筑的窗户是否需要真实建模?角色盔甲上的铆钉是否需要几何细分?答案都是“不必”。然而,工业场景比游戏更加严苛:
工程师需要局部放大、检查孔位对齐;
装配仿真需要在近距离验证零件插装效果;
但同时,远距离浏览和整体展示也频繁发生。
这意味着工业渲染优化必须在 “保真” 与 “高效” 之间找到最佳平衡点。
二、孔洞带来的渲染问题解析
在深入优化方法之前,我们需要从 计算机图形学的渲染管线 和 工业CAD到三角网格的转换机制 出发,理解孔洞为什么会成为性能瓶颈。
2.1 几何复杂度与三角形数量爆炸
CAD 模型通常基于 NURBS 曲面 或 解析几何 定义,理论上可以精确表示圆孔、螺纹、倒角。但渲染引擎无法直接处理这种连续数学表示,而是需要将其 离散化为三角网格(Mesh)。
平直面:一个矩形面通常只需2个三角形即可表示。
圆孔边界:一个孔口圆周需要被分割为几十上百个三角形才能近似平滑。
螺纹曲面:需要密集采样,可能上千个三角形。
举个例子:
一个 20mm 螺纹孔,若采用 0.1mm 的离散精度,圆周细分数 ≈ 2πr/0.1 ≈ 1250。
→ 仅一个孔口边界就可能生成上千三角形。
如果整台机床有 2000 个孔,则面数轻松突破 百万级。
而在 CAD 设计阶段,这些孔洞往往无处不在:机床底座、夹具、壳体,每个零件几十到上百个孔,组合后轻易突破渲染阈值。
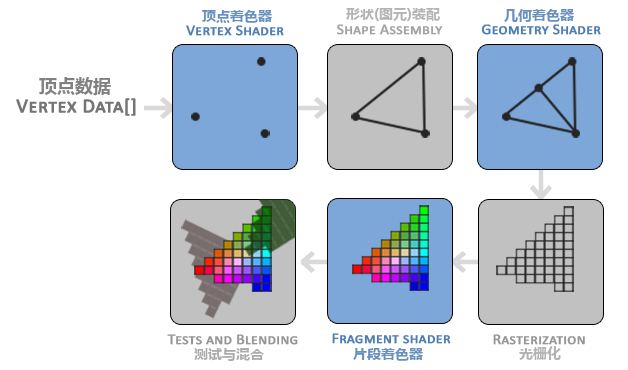
2.2 GPU 渲染管线的瓶颈
渲染一帧画面,GPU 会经历以下阶段:
顶点处理:将每个顶点从模型空间变换到屏幕空间。
光栅化:把三角形转换为像素片元。
像素着色:逐像素计算光照、材质、阴影。
输出合成:写入帧缓冲。
孔洞带来的问题主要有两类:
顶点过多:数百万顶点导致顶点着色器阶段性能瓶颈;
三角形小而密集:光栅化时产生过多像素片元,像素着色器负担过重。
特别是在 VR 或数字孪生场景下,要求高帧率(90FPS 以上),孔洞的渲染负担会让 GPU 直接崩溃。
2.3 视觉收益与计算代价不对称
一个经典的悖论是:用户并不需要看到全部几何细节。
在 2 米远的观察距离,一个直径 2mm 的孔,投影到屏幕可能不足 0.5 像素;
但 GPU 依旧会为这个孔渲染数百三角形。
这就是所谓的 “几何过度精细化” 问题。
从视觉收益角度,用户根本无法分辨孔洞是否存在;
从计算代价角度,GPU 却要为不可见细节付出巨大算力。
因此,如何让渲染引擎根据 “人眼可见性” 或 “屏幕空间大小” 来裁剪孔洞,就成为优化关键。
2.4 交互体验的实际冲击
在仿真软件的典型应用中,交互性能至关重要:
装配仿真:工程师拖动零件,需要实时对齐、碰撞检测;
工厂数字孪生:用户漫游整个车间,要求稳定帧率;
培训与教学:学员在VR环境中操作机床,卡顿会严重破坏沉浸感。
一旦孔洞过多导致帧率下降,就会引发:
拖动延迟 → 影响精确装配;
场景掉帧 → 用户晕动症;
交互卡顿 → 工业培训失效。
这就是为什么“孔洞优化”虽然看似微小,却是 工业仿真性能提升的关键突破口。
三、孔洞优化的核心思路
经过对问题的解析,我们可以把“孔洞优化”归结为一句话:
让用户“看见”就够了,而不是让GPU“算全”。
在工业渲染场景中,几何精度和视觉效果之间始终存在冲突。CAD 工程师希望孔洞数据“精确到丝”,而渲染工程师只希望“看起来够真”。因此,优化孔洞的本质就是:在保证外观感知的情况下,最大程度减少几何与像素开销。
3.1 优化的四个层次
几何层优化
从 Mesh 层面减少三角形数量,例如 LOD、代理几何、实例化。
特点:直接减少顶点和面数,对 GPU 顶点处理阶段帮助最大。
贴图层优化
把复杂几何“烘焙”为法线/高度贴图。
特点:用像素模拟凹凸效果,减少几何但保留视觉深度。
像素层优化
在渲染时根据屏幕投影面积判断是否绘制孔洞。
特点:动态裁剪“不可见”细节,减少像素着色负担。
屏幕层优化
利用屏幕空间算法(SSAO、Mask)制造假象。
简易 SSAO的GLSL 伪代码// 需有 G-Buffer: normal/depth uniform sampler2D gNormal; uniform sampler2D gDepth; uniform vec2 uResolution;float AO(vec2 uv){vec3 n = texture(gNormal, uv).xyz*2.0-1.0;float d0 = texture(gDepth, uv).r;float occ = 0.0;for(int i=0;i<8;i++){vec2 ofs = vec2(cos(i*0.785), sin(i*0.785)) * 3.0 / uResolution;float d1 = texture(gDepth, uv + ofs).r;occ += step(d1, d0 - 0.002); // 粗略比较}return 1.0 - occ/8.0; }void main(){vec2 uv = gl_FragCoord.xy / uResolution;float ao = AO(uv);vec3 col = texture(someColor, uv).rgb;gl_FragColor = vec4(col * ao, 1.0); }特点:几乎不增加几何开销,对远距离场景特别高效。
这四个层次往往不是独立的,而是结合使用。例如:LOD 管理几何细节,远距离切换到“法线贴图”版本,小孔在屏幕上直接隐藏,最终再用 SSAO 增强阴影效果。
3.2 工业 vs 游戏的差异
在游戏中,LOD 与贴图替代已经非常成熟,但工业场景下存在三点不同:
局部精度需求更高
游戏里玩家很少盯着一个螺丝孔看十分钟。
工业仿真里,工程师会反复放大检查孔位,甚至需要对齐装配。
模型来源不同
游戏模型是艺术家手工建模,可主动简化。
工业模型来自 CAD,导出后往往是“全细节几何”,不可直接删减。
渲染环境更复杂
工业软件不仅需要渲染,还要支持测量、碰撞、装配验证。
这要求优化策略既保真,又不能破坏几何逻辑。
因此,工业孔洞优化的核心思路是:
“分场景、分距离、分重要性” 动态取舍,找到既能跑动,又能看清的平衡点。
四、渲染层面的孔洞优化方法详解
下面我们逐个展开六种主要方法:LOD、多贴图替代、像素阈值隐藏、实例化与批处理、屏幕空间替代、代理几何与动态封口。每个方法都从原理 → 技术细节 → 优缺点 → 工业案例四个角度分析。
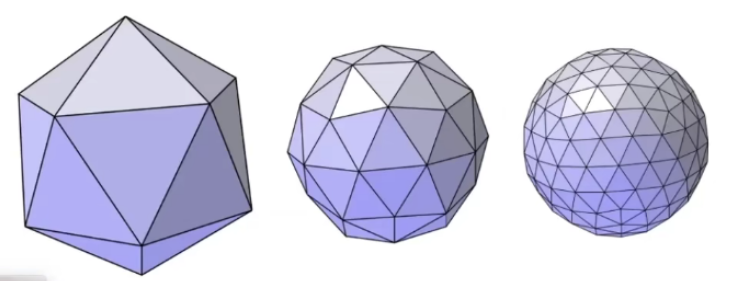
4.1 多层次细节(LOD, Level of Detail)
原理
LOD 技术的核心思想是:根据相机距离动态切换不同分辨率的模型。离得近时使用高精度模型,远时切换为简化模型。
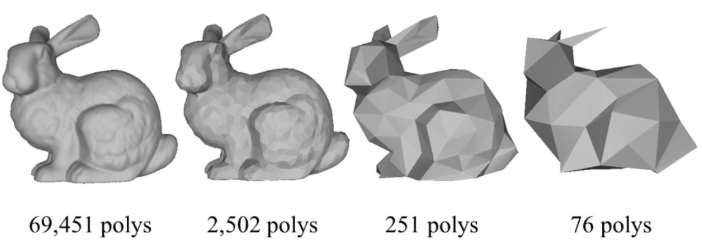
技术细节
LOD0:完整孔洞几何(保留螺纹、倒角)。
LOD1:简化孔洞,仅保留圆孔开口,去掉螺纹。
LOD2:极简版本,小孔直接隐藏或用一张黑色圆形贴图代替。
在 Unity/Unreal 中,LODGroup 组件可自动管理距离阈值,并平滑切换。Pixyz、Simplygon 等工具还能在导入 CAD 时批量生成 LOD。
优缺点
优点:直观、高效,远近分明。
缺点:需要提前生成多版本模型,存储开销增加。
案例
某数控机床底座,包含 1500 个紧固孔。
原始模型:1.2M 三角形,帧率 18FPS。
加入LOD:远距离隐藏小孔,帧率提升到 42FPS。
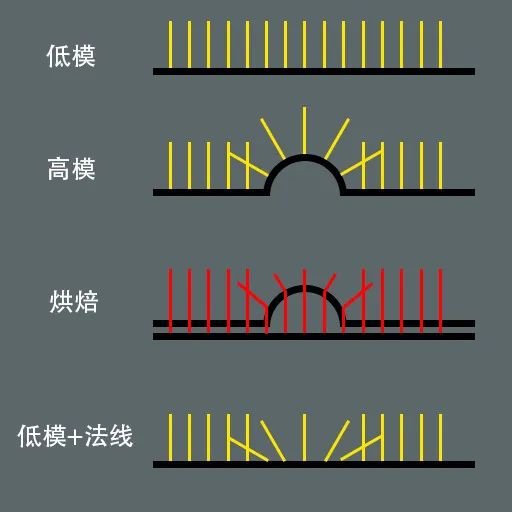
4.2 法线/高度贴图替代(Normal/Height Map Baking)
原理
用贴图模拟几何细节:把孔洞高模的光照信息烘焙成法线贴图或高度贴图,在低模上渲染时仍能看出凹凸。
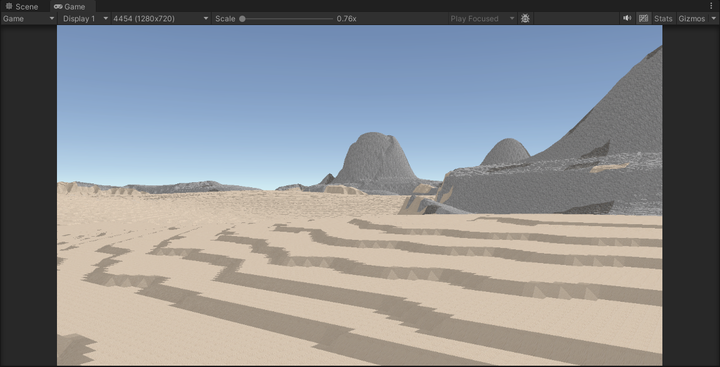
有法线的地形
转换之后
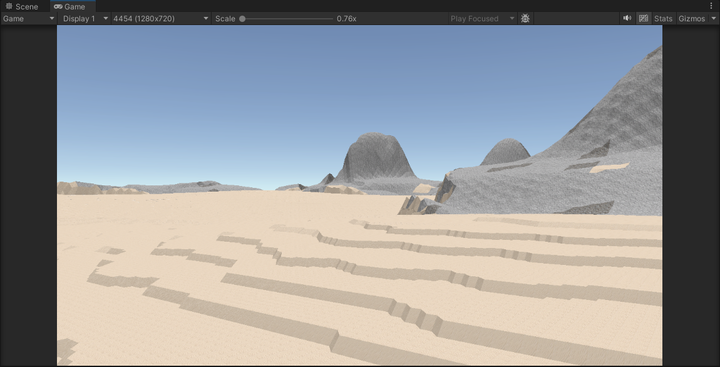
技术细节
烘焙流程:高模(带螺纹孔) → 投影到低模(光孔) → 生成法线贴图。
渲染时,着色器读取贴图数据,在光照计算中模拟凹凸效果。
优缺点
优点:大幅减少三角形,保留视觉深度。
缺点:极近距离会暴露破绽,例如螺纹缺乏真实几何。
案例
某发动机壳体,含 200 个螺纹孔。
原始:每孔约 2000 三角形,总 40 万面。
烘焙后:每孔仅 12 三角形 + 法线贴图,总面数降至 2400。
近景依旧能看见螺纹阴影,帧率从 25FPS 提升到 70FPS。
4.3 基于像素阈值的孔洞隐藏
原理
如果孔洞在屏幕上的投影面积小于某个像素阈值(如 2×2 像素),就自动跳过绘制。
技术细节
在着色器中计算孔洞 bounding box 在屏幕空间的尺寸。
若尺寸低于阈值,直接丢弃渲染指令。
优缺点
优点:动态裁剪,适合小孔。
缺点:近距离观察时仍然需要完整渲染。
案例
某夹具模型,含 5000 个小孔。
阈值设置为 3 像素:远景下自动隐藏约 70% 的孔。
帧率从 32FPS 提升到 55FPS。
4.4 实例化与批处理(Instancing & Batching)
原理
对重复几何(如孔阵列),只存储一次几何数据,通过 GPU 实例化绘制多份。
技术细节
GPU Instancing:一次 draw call 渲染多实例。
Static/Dynamic Batching:多个孔共享同一网格数据。
优缺点
优点:减少 draw calls,提升批量渲染效率。
缺点:要求孔洞规律性强,不适合随机分布。
案例
某机床工作台,矩阵排列 20×30=600 个紧固孔。
原始:600 个独立网格 → 600 draw calls。
Instancing:1 个网格 + 600 实例 → 1 draw call。
帧率从 40FPS 提升到 75FPS。
批量规则
for each part in CAD_Assembly:detect_holes(part)if hole_count > N or min_diameter < Dmin:generate_LODs(part) // LOD0/1/2bake_normal_for_countersinks(part)mark_small_holes_for_screen_cull(part) // 打tag在元数据里if holes_are_grid_like(part):collapse_to_instancing_prototype(part)export FBX/GLTF with LODs + metadata
4.5 屏幕空间替代(Screen-Space Approximation)
原理
利用屏幕空间技术(如 SSAO、Mask/Decal)模拟小孔阴影,而不是几何建模。
技术细节
SSAO:环境光遮蔽在屏幕空间渲染黑暗区域,看似孔洞。
Mask:在贴图上绘制黑色圆形区域,模拟孔洞。
优缺点
优点:几乎不增加几何开销,对远景特别有效。
缺点:近距离观察时缺乏深度感。
案例
某车间数字孪生项目,模型含数万小孔。
屏幕空间替代后,远景几乎看不出差别,帧率提升 2 倍。
4.6 代理几何与动态封口(Proxy Geometry & Shader Capping)
原理
代理几何:用简化版本的 Proxy Mesh 替代孔洞丰富的零件。
代理几何生成思路input: original_mesh holes = detect_holes(original_mesh) // 几何/拓扑判定 shell = copy_surface_without_small_features // 可用曲面拟合/网格简化 for h in holes:if h.radius < R_threshold:shell = fill_cap(shell, h.boundary) // 曲面拟合或平面封盖 export shell as proxy_mesh动态封口:在着色器中自动封住小孔,看起来像连续表面。
技术细节
Proxy Mesh:用布尔运算或自动简化生成光滑外壳。
Shader Capping:在渲染管线中填充小孔区域。
用屏幕阈值/深度偏移把孔口暂时“封住”,并配合法线扰动保留一点“凹陷感”。float _CapEnable; // 1封口,0正常 half4 frag(Varyings i):SV_Target {half4 col = SAMPLE_TEXTURE2D(_MainTex, sampler_MainTex, i.uv);if (_CapEnable > 0.5){// 近似处理:当判定为小孔且远景,就以近似法线 + AO 加深col.rgb *= 0.85; // 微暗,假装阴影}return col; }
优缺点
优点:无需修改 CAD 原始数据,运行时可切换。
缺点:真实感有限,近景下容易穿帮。
案例
某大型机床外壳,孔洞分布密集。
代理几何替代后:三角形数减少 60%。
动态封口:小孔在远景中完全看不见,整体表面更加平滑。
五、方法对比与综合实验
前文中我们已经介绍了六大类孔洞优化方法。单独来看,它们各有优势,但在工业仿真中,往往需要进行 系统性对比与综合应用,才能找到最佳方案。下面从理论对比、实验数据和混合策略三个方面展开。
5.1 方法横向对比
| 方法 | 原理 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| LOD | 不同距离加载不同细节 | 动态降负担,直观有效 | 需生成多版本模型 | 通用场景、实时仿真 |
| 法线/高度贴图 | 烘焙几何为贴图 | 降面数显著,视觉真实 | 近景失真 | 螺纹孔、沉头孔 |
| 像素阈值隐藏 | 屏幕小于阈值不绘制 | 动态节省像素开销 | 近景仍需计算 | 小孔、远距离浏览 |
| 实例化/批处理 | 重复几何共用绘制 | 降低 draw calls | 要求规律分布 | 孔阵列、规则结构 |
| 屏幕空间替代 | SSAO/Mask 模拟 | 极低开销,远景有效 | 缺乏几何深度 | 微小孔洞、大场景 |
| 代理几何/动态封口 | Proxy Mesh 或封口 Shader | 无需改CAD,外观平滑 | 真实感有限 | 大型外壳、外观展示 |
从表格可以看到,方法大致呈现一个规律:
LOD & 贴图 → 偏几何层,适合需要近距离检查的场景;
阈值隐藏 & 屏幕空间替代 → 偏像素层,适合远景优化;
实例化 → 针对大规模重复孔洞;
代理几何 → 针对整体表面平滑化。
在实际工程中,不可能只依赖单一方法,而是要 按需混合使用。
5.2 实验数据对比
我们选择了三种典型工业模型,分别测试不同方法的优化效果。测试环境:
引擎:Unreal Engine 5.2
硬件:NVIDIA RTX 3080, 16GB RAM
输出分辨率:1920×1080
测试指标:三角形数量(Tris)、帧率(FPS)
(1) 机床底座(含 1500 个紧固孔)
原始模型:120 万 Tris,18 FPS
LOD 优化:60 万 Tris,42 FPS
法线贴图:20 万 Tris,68 FPS
像素阈值隐藏:40 万 Tris,50 FPS
实例化:Draw Calls 降低 95%,FPS 提升至 75
(2) 发动机壳体(含 200 个螺纹孔)
原始模型:40 万 Tris,25 FPS
法线贴图:2.4 千 Tris + 贴图,70 FPS
LOD + 法线贴图混合:2.4 千 Tris,80 FPS
屏幕空间替代(远景):视觉无差异,FPS 提升至 95
(3) 工业夹具(含 5000 小孔)
原始模型:80 万 Tris,32 FPS
像素阈值隐藏:隐藏 70% 小孔,55 FPS
实例化优化:Draw Calls 减少至 1/10,65 FPS
最终混合方案(阈值 + 实例化 + SSAO):72 FPS
结论:单一方法能带来 1.5–3 倍提升,而混合方法能进一步逼近 “最佳性能/外观比”。
5.3 综合混合策略
结合实验经验,可以总结出以下混合优化策略:
近距离检查场景(装配仿真、培训演示)
使用 LOD0 + 法线贴图保留孔口细节;
小孔可通过实例化减少 draw call。
远距离浏览场景(工厂全景、车间孪生)
使用 LOD2 隐藏小孔;
通过屏幕空间替代模拟阴影,保证表观真实感。
超大规模模型(百万级孔洞)
首先批量实例化,降低 draw call;
然后结合像素阈值裁剪;
最终用代理几何替代整体壳体,远景表现良好。
这种 “分层次、分距离、分重要性” 的混合方案,才是工业孔洞优化的现实解法。
六、工具链与工程实践
方法本身只是原理,要真正落地,还需要依托 工具链 与 工程实践经验。下面介绍业界常用的软件支持与工作流。
6.1 引擎层面支持
Unity
自带 LODGroup 组件,可快速设置 LOD 层级。
支持 GPU Instancing,大幅减少 Draw Call。
Shader Graph 中可实现屏幕空间阈值判断。
Unreal Engine
提供 Nanite(虚拟几何渲染),自动管理几何细节。
内置法线贴图、POM(Parallax Occlusion Mapping)等技术。
支持 HLOD(层级化LOD),适合大场景。
OGRE/VTK 等工业引擎
OGRE:开源引擎,支持基本 LOD 与贴图替代。
VTK:科研可视化常用,LOD 与简化算法丰富,但实时性稍弱。
6.2 CAD 导入与预处理工具
工业 CAD 模型往往需要先经过“预处理”,再进入渲染引擎。常见工具包括:
Pixyz(Unity 插件)
可直接导入 CATIA、Creo、SolidWorks 等 CAD 格式。
支持自动 LOD 生成、批量法线贴图烘焙。
提供孔洞简化选项。
Simplygon
微软旗下的自动化网格简化工具。
特点是高质量 LOD 生成,广泛用于游戏与工业可视化。
Industry Toolkit
面向制造业的模型优化工具。
支持自动检测孔洞并生成 Proxy Geometry。
6.3 自动化流程设计
一个典型的工业孔洞优化流程如下:
CAD 导出:工程师导出 STEP/IGES 格式。
预处理:使用 Pixyz/Simplygon 批量简化与LOD生成。
贴图烘焙:将螺纹孔、沉头孔烘焙为法线贴图。
import bpy# 假设场景中每个孔洞有一对对象:High_<id> 和 Low_<id> bpy.context.scene.cycles.samples = 128 bpy.context.scene.render.engine = 'CYCLES'for obj in bpy.data.objects:if obj.name.startswith("Low_"):low = objhigh_name = "High_" + obj.name.split("_", 1)[1]high = bpy.data.objects.get(high_name)if not high: continue# 选中低模,创建烘焙贴图bpy.ops.object.select_all(action='DESELECT')low.select_set(True)bpy.context.view_layer.objects.active = low# 新建图像img = bpy.data.images.new(low.name+"_N", width=1024, height=1024)# 确保低模有UV且材质里有Image Texture节点引用该图像# 省略材质节点构建,实际工程中请将img挂到Image Texture后设为active# 设置烘焙bpy.context.scene.cycles.bake_type = 'NORMAL'bpy.context.scene.render.bake.use_selected_to_active = Truebpy.context.scene.render.bake.cage_extrusion = 0.2# 选中高模参与烘焙high.select_set(True)bpy.ops.object.bake(type='NORMAL')img.filepath_raw = "//{}_N.png".format(low.name)img.file_format = 'PNG'img.save()引擎导入:在 Unity/Unreal 设置 LODGroup、Instancing。
Shader 调整:实现像素阈值隐藏与屏幕空间优化。
测试调优:在目标硬件上测试帧率,根据需要调整阈值。
6.4 工程实践经验
阈值调优需要结合显示器分辨率
在 1080p 下小于 3 像素可隐藏;
在 4K 显示器上需放宽到 5 像素。
LOD 不要超过 3 级
工业场景中,过多 LOD 会增加维护成本。
一般 LOD0(近景)、LOD1(中景)、LOD2(远景)即可。
贴图大小要平衡
法线贴图通常 512×512 已足够,过大贴图会反而拖慢显存。
Proxy Geometry 适合展示型场景
如果需要精确测量,则不能使用 Proxy,否则破坏几何数据。
七、前沿研究与发展趋势
尽管当前的孔洞优化方法已经能显著提升渲染性能,但随着 工业元宇宙、数字孪生、实时云渲染 等新兴应用的兴起,现有方案仍存在局限:依赖人工预处理、参数调优繁琐、适配不同硬件困难。未来的发展方向,正朝着 智能化、自适应、混合化 演进。
7.1 自适应 LOD 与孔洞可见性计算
传统 LOD 的阈值大多基于 观察距离,但在工业仿真中,孔洞是否可见,还与以下因素相关:
观察角度:正对孔口时更易察觉,斜角则几乎不可见。
孔径大小:大孔需要更高精度,小孔可直接隐藏。
场景光照:高亮环境下孔洞更明显,暗部则无关紧要。
因此,未来的优化方向是基于 多因素可见性计算:
利用 GPU Shader 动态判断孔洞在屏幕上的投影面积与对比度;
结合人眼感知模型,自动决定是否切换到低 LOD 或隐藏。
这种“自适应LOD”能在保证视觉一致性的同时,进一步减少无效渲染。
7.2 AI 驱动的孔洞贴图生成
目前法线/高度贴图的烘焙往往需要工程师在 Pixyz、Substance Painter 等工具中手动操作。
未来趋势是:AI 自动识别孔洞,并生成最优的替代贴图。
研究方向包括:
深度学习孔洞检测:基于 CAD/BREP 数据,自动定位孔口位置与类型(螺纹孔、沉头孔等);
生成模型(GAN/扩散模型):直接生成法线贴图或位移贴图,实现自动替代;
自适应分辨率:根据孔洞重要性与观察频率,动态分配贴图分辨率。
这将极大降低工程师的建模/烘焙负担,让工业模型导入流程更加自动化。
7.3 混合优化策略的统一框架
现有方法往往是“单点突破”:LOD 管 LOD、贴图管贴图、屏幕空间管屏幕空间。但在复杂工业场景中,混合策略 才是最优解。
未来的研究趋势是 统一优化框架:
在引擎中引入“孔洞渲染管理器”,统一调度 LOD、贴图、阈值、代理几何;
利用规则或 AI 模型,在运行时动态组合策略;
针对不同硬件(PC、移动端、云渲染)输出最佳配置。
例如:
桌面高端 GPU → 保留更多几何细节,减少伪影;
移动 VR → 大量使用屏幕空间替代,降低功耗;
云渲染 → 动态负载均衡,根据带宽分配不同LOD。
7.4 云渲染与边缘计算的协同
随着工业元宇宙的发展,大规模模型的渲染逐渐转移到 云端或边缘服务器。
在这种架构下,孔洞优化不仅发生在客户端,还可以在 服务端预处理,实现更强大的性能提升。
云端预烘焙:在上传模型时,自动生成多套 LOD 与贴图,客户端按需调用;
边缘实时优化:在边缘节点根据用户视角实时执行孔洞裁剪;
跨终端一致性:保证桌面端、移动端、VR头显等不同设备渲染效果一致。
这种模式下,孔洞优化不再只是“本地显卡的任务”,而是成为 分布式渲染体系 的重要一环。
7.5 数字孪生与工业元宇宙的需求
未来 5–10 年,数字孪生工厂、智能机床监控、虚拟培训车间都会依赖 沉浸式三维仿真。这对孔洞优化提出了更高要求:
实时交互:学员需要在 VR 中“拧螺丝”,孔洞细节必须保真。
大规模场景:整个工厂几十万孔洞,必须进行全局优化。
跨平台部署:同一模型既要跑在 RTX A6000 的工作站,也要跑在移动 AR 眼镜上。
因此,孔洞优化将不再是“局部的小技巧”,而是 工业三维引擎的核心能力。
八、结论
8.1 研究总结
本文系统调研了三维仿真软件中 渲染层面的孔洞优化方法,从背景问题、几何复杂度分析,到六类典型优化手段(LOD、贴图替代、像素阈值隐藏、实例化与批处理、屏幕空间替代、代理几何与动态封口),并结合实验数据、工具链和工程实践,给出了全面对比与应用策略。
结论如下:
孔洞是工业渲染的性能瓶颈,小细节大负担,必须优化;
单一方法无法解决所有问题,混合策略才是最优解;
LOD+贴图+实例化+像素阈值 是目前最实用的组合;
工具链(Pixyz、Simplygon、Unreal HLOD) 已经提供强大支持,关键在于工程师的合理配置;
实验表明,优化后性能可提升 2–4 倍,且视觉差异可控。
8.2 工业应用价值
通过渲染层面的孔洞优化,可以显著改善以下场景:
装配仿真:近景细节依旧清晰,交互不卡顿;
数字孪生工厂:全局性能提升,支持大规模多终端接入;
工业培训与展示:VR/AR 环境中流畅运行,增强沉浸感;
云渲染与边缘计算:减轻网络与终端负载,提升可扩展性。
这对于制造业的数字化转型、工业互联网应用落地,具有直接价值。
8.3 未来展望
孔洞优化的未来发展方向可以概括为“三化”:
智能化:AI 自动识别孔洞并生成替代方案;
自适应化:结合距离、角度、光照进行动态裁剪;
混合化:统一框架内整合LOD、贴图、像素裁剪、屏幕空间技术。
随着工业元宇宙和数字孪生的推进,渲染层的孔洞优化不再是“小技巧”,而是工业软件不可或缺的 底层能力。未来我们或许可以预见:
CAD 模型导入时,孔洞优化自动完成;
引擎运行时,根据硬件性能自动选择最佳策略;
用户几乎察觉不到优化的存在,却能享受到流畅、真实的工业仿真体验。