自动捕鱼器设计cad+设计说明书+三维图
摘 要
随着人们生活水平的提高,对鱼类等水产品的需求越来越多,传统捕鱼方式已经无法满足对水产品的需求。自动捕鱼器的出现,可以大大提高捕鱼效率,实现可持续发展。自动捕鱼器能够实现自动化捕鱼,大大提高捕鱼效率,同时还能减少人工成本。对于促进地方经济发展具有重要意义。
本文设计了一种自动捕鱼机器人,旨在提高捕鱼效率,减少对环境的影响。该机器人采用远程遥控技术,通过控制自动捕鱼装置和网笼等设备,实现自动捕鱼的操作。本文主要完成了自动捕鱼机器人的机械结构设计和实物模型的制作,使用solidworks软件完成了自动捕鱼机器人的三维数字模型的绘制,使用ansys的workbench完成了自动捕鱼机器人的主要零部件有限元分析,完成了自动捕鱼机器人的实物模型制作。实验进一步分析表明,该机器人具有智能化、精准化、多样化和环保化等特点,有广阔的应用前景。未来的发展方向包括进一步提高智能化程度、改进控制系统和增加功能等方面。该机器人为水域管理和水产养殖等领域的发展提供了新的思路和方法。
目 录
1 绪论 1
1.1 选题的背景及意义 1
1.2 国内外研究的现状 1
1.2.1 国外的研究现状 1
1.2.2 国内的研究现状 2
1.3 自动捕鱼装置发展趋势 2
1.4 本文拟采取的研究方法 3
1.5 本文设计主要研究内容 4
2 自动捕鱼机的总体方案设计 5
2.1 设计原则和设计方法 5
2.2 总体结构设计 5
2.3 总体设计方案 6
2.4 总体方案的创新点 7
2.4 本章小结 8
3 自动捕鱼机的机械结构设计 9
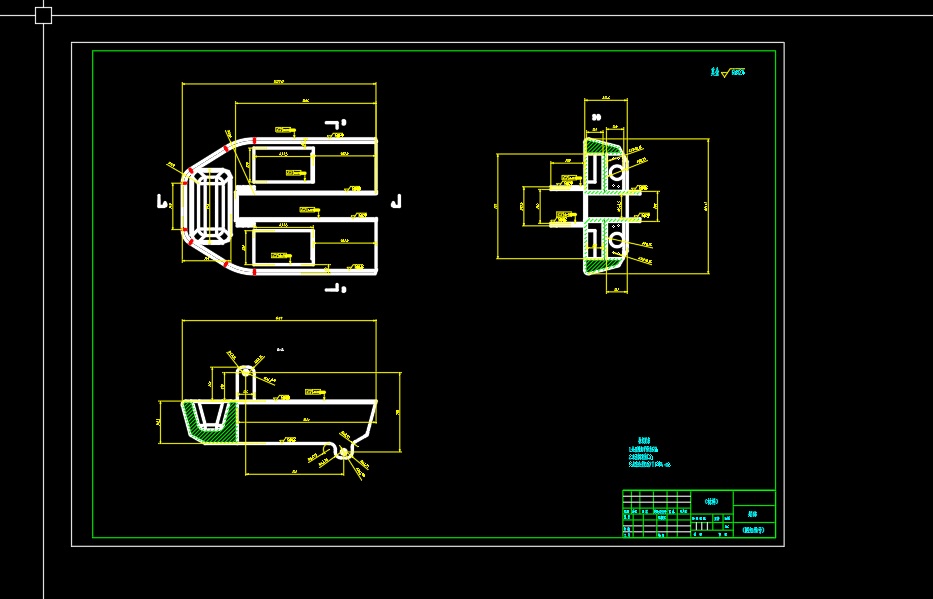
3.1 机体结构的设计 9
3.1.1 船体的结构设计 9
3.1.2 船体的排水量和吃水深度 9
3.3 行走装置的设计 10
3.3.1 机器人受到的阻力 10
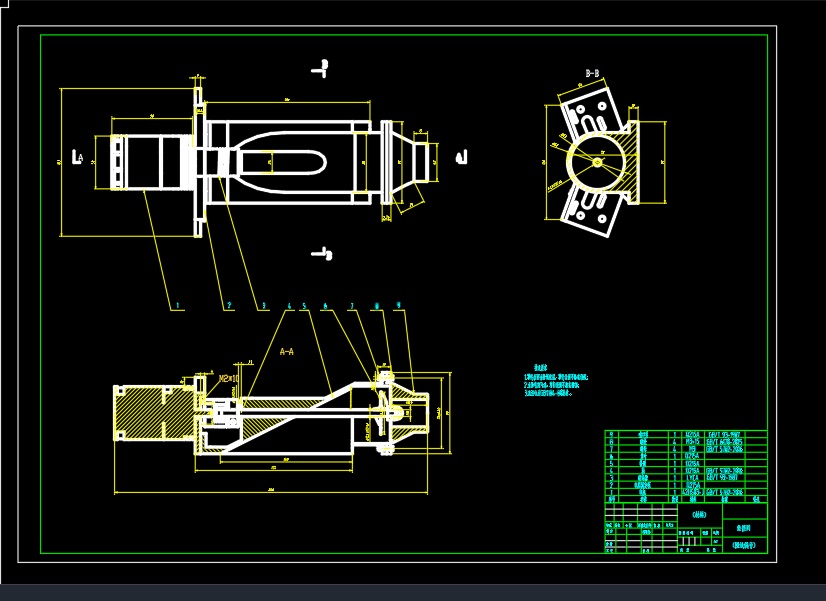
3.3.2 推进器的选型 12
3.3.3 喷水推进器的工作原理 13
3.3.4 喷水推进器的优点 13
3.3.5 喷水推进器推力的影响因素 14
3.3.6 喷水电机的选型 14
3.3.7 电池的选型 15
3.4 捕鱼装置的设计 16
3.4.1 电机的选型 17
3.4.2 输入轴的动力参数 17
3.4.3 传送带的设计 18
3.4.4 轴的设计 19
3.4.5 轴承的选型 20
4 自动捕鱼机的硬件电路设计 22
4.1 控制器的选型设计 22
4.1.1 单片机的选型 22
4.1.2 电源模块 23
4.1.3 晶振电路模块 23
4.1.4 复位电路模块 24
4.1.5 下载电路模块 24
4.1.6 BOOT电路模块 25
4.2 远程无线遥控电路 25
4.3 电机驱动电路 27
4.4 显示电路的设计 27
4.5 继电器控制电路 28
5 自动捕鱼机的软件系统设计 29
5.1 软件的总体方案框图 29
5.2 OLED显示程序的设计 29
5.3 电机控制程序的设计 30
5.4 遥控程序的设计 31
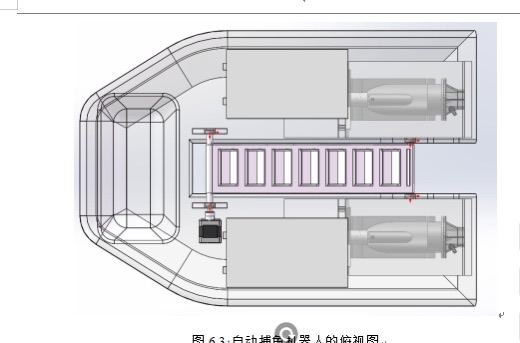
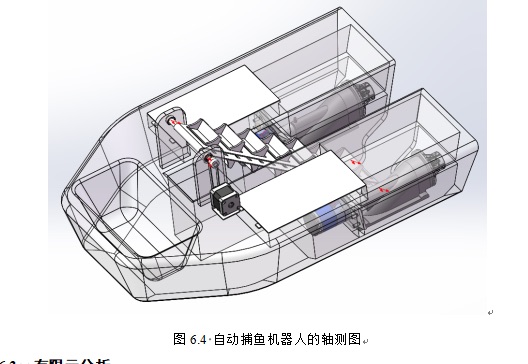
6 自动捕鱼机器人的三维模型和有限元分析 33
6.1 三维模型的绘制 33
6.2 三维模型的绘制 34
6.3 有限元分析 35
6.3.2 材料的选择 36
6.3.3 网格划分 37
6.3.4 施加载荷 37
6.3.5 后处理 37
6.4 自动捕鱼机器人的工艺性分析 38
7 实物样机的制作 39
7.1 样机的组成框架 39
7.2 硬件系统的调试 39
7.3 软件系统的调试 40
7.4 样机的测试模拟 40
8.总结与展望 42
8.1 总结 42
8.2 展望 42
文 献 参 考 43
致 谢 45
1 绪论
1.1 选题的背景及意义
自动捕鱼器是一种利用先进的技术和设备,实现对水产资源的高效捕捞的工具。随着人口的增长和生活水平的提高,对海洋和淡水资源的需求也越来越大,为了满足人们对于水产资源的需求,开发一种高效、可持续的捕鱼工具变得尤为重要。因此,自动捕鱼器研究也应运而生。传统的捕鱼方式需要大量的人力和时间,同时也对海洋环境和水生生物造成了不小的损害,使得海洋资源的开发利用变得十分困难。而自动捕鱼器的出现,则能够大大提高捕鱼效率,降低成本,减少对海洋环境的污染和对水生生物的伤害,从而实现可持续的海洋资源开发利用。
随着人口的增长和生活水平的提高,对水产品的需求也越来越大。而传统捕鱼方式无法满足这种需求,因此需要一种高效的捕鱼工具。由于过度捕捞和环境污染等原因,海洋资源日益减少,传统捕鱼方式已经无法满足对水产品的需求。自动捕鱼器的出现,可以大大提高捕鱼效率,实现可持续发展。传统捕鱼方式对海洋环境和水生生物造成了很大的伤害。自动捕鱼器采用现代科技,可以减少对环境和生态的破坏。
自动捕鱼器能够实现自动化捕鱼,大大提高捕鱼效率,同时还能减少人工成本。自动捕鱼器可以减少对海洋环境和水生生物的损害,对于保护生态环境具有重要意义。自动捕鱼器的出现可以促进渔业的发展,增加渔业产值和就业机会,对于促进地方经济发展具有重要意义。
1.2 国内外研究的现状
1.2.1 国外的研究现状
自动捕鱼器是一种使用计算机视觉和机器学习技术来自动识别和捕捉鱼类的设备。在国外,自动捕鱼器的研究经历可以追溯到早期的计算机视觉和机器学习技术的开发阶段。下面我将介绍一些关键的研究经历。
在早期,自动捕鱼器的研究主要集中在计算机视觉和图像处理技术的发展。这些技术被用来分析和识别图像中的鱼类,例如通过颜色、纹理和形状等特征来识别鱼类。然而,这些方法受到光照、水质和鱼类运动等因素的影响较大,导致识别准确度较低。随着深度学习技术的兴起,自动捕鱼器的研究开始使用卷积神经网络(CNN)等深度学习技术来解决图像识别中的问题。通过使用大量的鱼类图像来训练CNN模型,可以大大提高识别准确度。此外,研究人员还尝试了一些新的方法,例如使用多个摄像头来提高识别准确度,以及通过将水下摄像头与声纳等传感器相结合来实现更准确的捕鱼。除了在科学研究中使用自动捕鱼器外,它还被广泛应用于商业捕捞和水产养殖领域。例如,自动捕鱼器可以用于监测水产养殖场的鱼类数量和生长情况,以帮助养殖者做出更好的决策。在商业捕捞中,自动捕鱼器可以帮助捕鱼船减少人力成本,同时提高捕鱼效率。
随着技术的不断发展,自动捕鱼器将会在更多领域得到应用。例如,自动捕鱼器可以与物联网和人工智能等技术相结合,实现更精准的鱼类识别和捕捉。此外,自动捕鱼器还可以用于监测海洋生态系统的健康状况,帮助保护和管理海洋资源。
1.2.2 国内的研究现状
自动捕鱼器是一种利用计算机视觉和机器学习技术来实现自动捕捉鱼类的设备。在国内,自动捕鱼器的研究经历也有着悠久的历史,并在近年来得到了快速发展。自动捕鱼器是一种利用计算机视觉和机器学习技术来实现自动捕捉鱼类的设备。在国内,自动捕鱼器的研究经历也有着悠久的历史,并在近年来得到了快速发展。早在上世纪80年代末期,中国科学院水生生物研究所的研究人员就开始了自动捕鱼器的研究工作。在这个阶段,研究人员主要是采用传统的计算机视觉和图像处理技术,如色彩、纹理和形状等特征进行鱼类识别。但是,由于光照、水质等环境因素的影响以及鱼类的运动速度和方向等因素,使得传统的图像处理方法在鱼类识别方面存在一定的局限性。
随着技术的不断发展和应用领域的拓展,自动捕鱼器在国内的发展前景非常广阔。未来,自动捕鱼器可以与物联网、云计算和人工智能等技术相结合,实现更加精准的鱼类识别和捕捉,
1.3 自动捕鱼装置发展趋势
自动捕鱼器是一种利用现代技术和设备实现对水产资源的高效捕捞的工具,其发展前景在技术、市场和环境等方面都具有广阔的前景。
(1)技术方面
自动捕鱼器在技术方面的发展具有以下几个方向:
智能化:未来自动捕鱼器将更加智能化,利用人工智能、机器学习等技术来实现更精准的捕捞和更准确的鱼类辨识,从而提高捕捞效率,减少误捕和非目标物种的捕捞。
无人化:随着无人技术的不断发展,未来的自动捕鱼器将越来越趋向无人化。利用自主控制和遥控技术,可以实现远程控制和自主操作,从而提高捕捞效率和减少人工成本。
低碳化:未来的自动捕鱼器将更加注重低碳化和环保。采用新型材料和新能源技术,减少能耗和污染,从而更好地保护海洋生态环境。
(2)市场方面
自动捕鱼器的市场前景非常广阔,主要表现在以下几个方面:
需求旺盛:随着人口增长和生活水平提高,人们对水产品的需求不断增加。自动捕鱼器的出现,可以提高捕鱼效率,满足人们对水产品的需求,具有很高的市场需求。
降低成本:自动捕鱼器可以大大降低人工成本和物料成