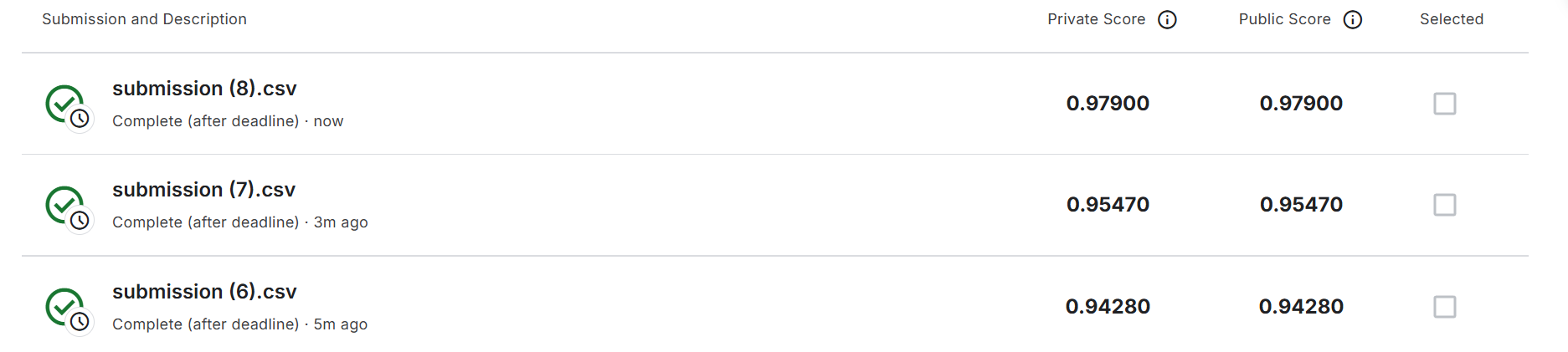
实战 Kaggle 比赛:图像分类 (CIFAR-10) TOP1 0.97900
比赛连接CIFAR-10 - Object Recognition in Images | Kaggle
首先,导入竞赛所需的包和模块。
import collections
import os
import math
import random
import torch
import torchvision
from d2l import torch as d2l
import shutil
import pandas as pd
from torch import nn了解一些函数功能
text=" Hello World "
print(text.strip())
print(text.lstrip())
print(text.rstrip())
a=[1,2,3]
b=[4,5,6]
print(dict(zip(a,b)))
print(dict([("a", 1), ("b", 2)]))output
Hello World
Hello World Hello World
{1: 4, 2: 5, 3: 6}
{'a': 1, 'b': 2}由于数据量大,这里本地就采用小样本继续train
如果想要完整运行,设置demo=False
d2l.DATA_HUB['cifar10_tiny'] = (d2l.DATA_URL + 'kaggle_cifar10_tiny.zip','2068874e4b9a9f0fb07ebe0ad2b29754449ccacd')# 如果使用完整的Kaggle竞赛的数据集,设置demo为False
demo = Trueif demo:data_dir = d2l.download_extract('cifar10_tiny')
else:data_dir = '../data/cifar-10/'
print(data_dir)查看数据
def read_cvs_labels(filename):with open(filename, 'r') as f:lines = f.readlines()[1:]tokens = [l.rstrip().split(',') for l in lines]return dict((name,label) for name,label in tokens)
labels=read_cvs_labels(os.path.join(data_dir, 'trainLabels.csv'))
print(len(labels))
print(len(set(labels.values())))1000 10
了解Collection
from collections import Countertest_labels = ['apple', 'banana', 'apple', 'orange', 'banana', 'apple']
counter = Counter(labels.values())
print(counter.most_common()[-1][1])copy文件,把train数据分成train and valid and trian+valid
def movefile(filename, target_dir):# 会自动创建对个目录shutil.mkdirs(target_dir, exist_ok=True)shutil.move(filename, target_dir)
def copyfile(filename, target_dir):# """将文件复制到目标目录""os.makedirs(target_dir, exist_ok=True)shutil.copy(filename, target_dir)def reorg_train_valid(data_dir, labels, valid_ratio):# 训练数据集中样本最少的类别中的样本数n = collections.Counter(labels.values()).most_common()[-1][1]# 验证集中每个类别的样本数n_valid_per_label = max(1, math.floor(n * valid_ratio))label_count = {}for train_file in os.listdir(os.path.join(data_dir, 'train')):# 获取train目录下的每张图片的标签label = labels[train_file.split('.')[0]]fname=os.path.join(data_dir, 'train', train_file)copyfile(fname, os.path.join(data_dir, 'train_valid_test', 'train_valid', label))if label not in label_count or label_count[label] < n_valid_per_label:copyfile(fname, os.path.join(data_dir, 'train_valid_test', 'valid', label))# 统计每个类别的样本数,每次放入新的图片就加一label_count[label] = label_count.get(label, 0) + 1else:copyfile(fname, os.path.join(data_dir, 'train_valid_test','train', label))return n_valid_per_label划分test
def reorg_test(data_dir):"""在预测期间整理测试集,以方便读取"""for test_file in os.listdir(os.path.join(data_dir, 'test')):copyfile(os.path.join(data_dir, 'test', test_file),os.path.join(data_dir, 'train_valid_test', 'test','unknown'))读取labels and 划分数据
def reorg_cifar10_data(data_dir, valid_ratio):labels=read_cvs_labels(os.path.join(data_dir, 'trainLabels.csv'))reorg_train_valid(data_dir,labels,valid_ratio)reorg_test(data_dir)batch_size=8 if demo else 32
valid_ratio=0.1
reorg_cifar10_data(data_dir, valid_ratio)获取Vit transform这里我们使用VIt_B_16的预训练模型和ResNet相比能取得很好的效果
from torchvision.models import vit_b_16, ViT_B_16_Weights
vit_transform=torchvision.models.ViT_B_16_Weights.DEFAULT.transforms()
# get_net()
print(vit_transform)Data augmentation
# 使用Vit_transform进行数据增强,因为使用了vit_transform的预训练模型
train_ds, train_valid_ds = [torchvision.datasets.ImageFolder(os.path.join(data_dir, 'train_valid_test', folder),transform=vit_transform) for folder in ['train', 'train_valid']]
# [torchvision.datasets.ImageFolder label按照文件夹名字排好
valid_ds, test_ds = [torchvision.datasets.ImageFolder(os.path.join(data_dir, 'train_valid_test', folder),transform=vit_transform) for folder in ['valid', 'test']]典型的工作流程:
训练阶段:用 train 训练模型,用 valid 验证并调整超参数。
最终训练阶段:用 train_valid(合并后的数据)重新训练模型(此时不再需要验证集,因为超参数已经固定)。
测试阶段:用 test 评估最终模型性能。
DataLoader
train_iter, train_valid_iter = [torch.utils.data.DataLoader(dataset, batch_size, shuffle=True, drop_last=True)for dataset in (train_ds, train_valid_ds)]
# drop_last=True means the last incomplete batch will be droppedvalid_iter = torch.utils.data.DataLoader(valid_ds, batch_size, shuffle=False,drop_last=True)test_iter = torch.utils.data.DataLoader(test_ds, batch_size, shuffle=False,drop_last=False)获取Vit模型
def get_net():num_classes = 10# 加载预训练的 ViTweight=torchvision.models.ViT_B_16_Weightsnet=vit_b_16(weights=weight.DEFAULT)# fine-tuning:替换分类头num_ftrs=net.heads.head.in_featuresnet.fc=nn.Linear(num_ftrs,num_classes)return net
loss=nn.CrossEntropyLoss(reduction='none')
# 默认情况:如果不指定 reduction 或设置为 'mean',损失会对所有样本的损失值求平均;如果设置为 'sum',则对所有样本的损失值求和。
# reduction='none':不进行任何聚合操作,直接返回每个样本的损失值。假设输入是一个 batch 大小为 N 的数据,则输出是一个形状为 (N,) 的张量,每个元素对应一个样本的损失。instance用法
x=[1,2,3]
print(isinstance(x,dict))
print(isinstance(x,list))定义训练一轮的函数
def train_batch_ch13(net, X, y, loss, trainer, devices):"""使用多个GPU训练一个小批次(定义在第13章)定义在 :numref:`sec_image_augmentation` 章节"""# 将输入数据X转移到第一个GPU设备# 判断X是否属于List if isinstance(X, list):# 用于BERT微调等特殊情况(后续章节会介绍)X = [x.to(devices[0]) for x in X]else:X = X.to(devices[0])# 将标签y转移到第一个GPU设备y = y.to(devices[0])# 设置网络为训练模式net.train()# 清空优化器的梯度trainer.zero_grad()# 前向传播计算预测值pred = net(X)# 计算损失l = loss(pred, y)# 反向传播计算梯度(使用mean()而不是sum(),避免受批次大小影响)l.mean().backward()# 更新模型参数trainer.step()# 计算批次总损失(用于后续统计)train_loss_sum = l.sum()# 计算批次准确率train_acc_sum = d2l.accuracy(pred, y)return train_loss_sum, train_acc_sumCFG参数配置
# 参数配置Config
best_params = {'weight_decay': 3.1595250466032746e-05,'learning_rate': 5e-5,# 0.0007394699205144519'dropout_rate': 0.10845782679503657}devices, num_epochs, lr, wd = d2l.try_all_gpus(), 30, best_params['learning_rate'], best_params['weight_decay']
lr_period, lr_decay, net = 4, 0.9, get_net()上面内容了基于ResNet-50和Optuna进行超参数搜索获得
当然也可以基于vit效果会更好,你可以自己试一试
相关文档:Optuna: A hyperparameter optimization framework — Optuna 4.5.0 documentation
定义带Warmup的余弦退火函数
import math
import torch
from torch.optim.lr_scheduler import LambdaLRdef cosine_warmup_scheduler(optimizer, warmup_epochs=5, max_epochs=num_epochs, max_lr=best_params['learning_rate']):def lr_lambda(current_epoch):if current_epoch < warmup_epochs:# 线性 warmupreturn float(current_epoch + 1) / float(warmup_epochs)else:# 余弦退火progress = (current_epoch - warmup_epochs) / (max_epochs - warmup_epochs)return 0.5 * (1.0 + math.cos(math.pi * progress))for param_group in optimizer.param_groups:param_group['lr'] = max_lrreturn LambdaLR(optimizer, lr_lambda)
开始Train
def train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period,lr_decay):# 初始化优化器:使用随机梯度下降(SGD),设置学习率、动量(momentum)和权重衰减(weight_decay)# trainer = torch.optim.SGD(net.parameters(), lr=lr, momentum=0.9,# weight_decay=wd)trainer=torch.optim.Adam(net.parameters(),lr=lr,weight_decay=wd)# 学习率调度器:warmup学习率策略和余弦退火学习率策略scheduler = cosine_warmup_scheduler(trainer)# 获取训练集的batch数量,并初始化计时器num_batches, timer = len(train_iter), d2l.Timer()# 设置动画显示图例(训练损失、训练准确率,如果有验证集则加上验证准确率)legend = ['train loss', 'train acc']if valid_iter is not None:legend.append('valid acc')# 初始化动画绘制器(用于可视化训练过程)animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],legend=legend)# 使用多GPU并行训练(DataParallel),主设备为devices[0]net = nn.DataParallel(net, device_ids=devices).to(devices[0])# 开始训练循环for epoch in range(num_epochs):net.train() # 设置模型为训练模式metric = d2l.Accumulator(3) # 初始化累加器(用于累计损失、准确率、样本数)# 遍历训练集的每个batchfor i, (features, labels) in enumerate(train_iter):timer.start() # 开始计时# 训练一个batch,返回损失和准确率l, acc = train_batch_ch13(net, features, labels,loss, trainer, devices)# 累加当前batch的损失、准确率、样本数metric.add(l, acc, labels.shape[0])timer.stop() # 停止计时# 每训练完约1/5的batch或最后一个batch时,更新训练曲线if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:animator.add(epoch + (i + 1) / num_batches,(metric[0] / metric[2], metric[1] / metric[2],None))# 如果有验证集,计算验证集准确率并更新曲线if valid_iter is not None:net.eval() # 设置模型为评估模式valid_acc = d2l.evaluate_accuracy_gpu(net, valid_iter)animator.add(epoch + 1, (None, None, valid_acc))scheduler.step() # 更新学习率(按lr_period和lr_decay调整)# 打印训练结果measures = (f'train loss {metric[0] / metric[2]:.3f}, 'f'train acc {metric[1] / metric[2]:.3f}')if valid_iter is not None:measures += f', valid acc {valid_acc:.3f}'# 打印训练速度(样本数/秒)和使用的设备print(measures + f'\n{metric[2] * num_epochs / timer.sum():.1f}'f' examples/sec on {str(devices)}')进行小样本训练
if demo:# 设置demo为True时进行小批量运行来获取最合适的超参数train(net, train_iter, valid_iter, num_epochs, lr, wd, devices, lr_period,lr_decay)# 0.547 valid acc
else:net, preds = get_net(), []net.eval()train(net, train_valid_iter, None, num_epochs, lr, wd, devices, lr_period,lr_decay)for X, _ in test_iter:y_hat = net(X.to(devices[0]))preds.extend(y_hat.argmax(dim=1).type(torch.int32).cpu().numpy())sorted_ids = list(range(1, len(test_ds) + 1))sorted_ids.sort(key=lambda x: str(x))df = pd.DataFrame({'id': sorted_ids, 'label': preds})df['label'] = df['label'].apply(lambda x: train_valid_ds.classes[x])df.to_csv('submission.csv', index=False)训练10轮效果
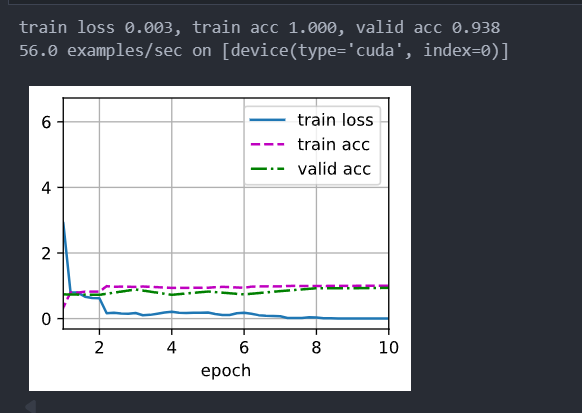
训练30轮效果
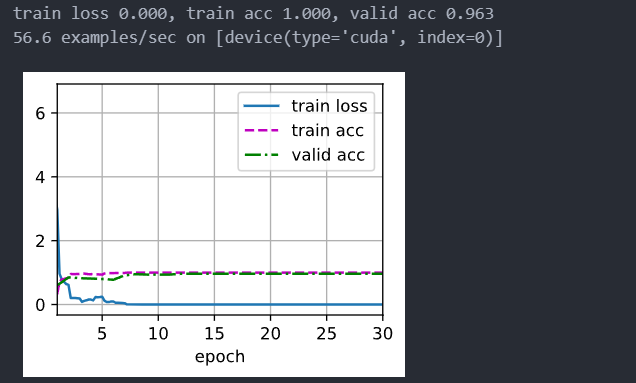
全部训练的提交结果
Top1实现代码Cifar-10 ResNet152- 97.5% Acc
完整代码:dive-into-deep-learning/d2l/CIFAR-10/main.ipynb at main · hllqkb/dive-into-deep-learning