普蓝超强承重越野移动机器人底盘轻松应对复杂路段
在一些特殊复杂的户外场景中移动机器人是极具挑战性的,尤其是山坡、野外、阶梯、碎石路段等路面环境。这意味移动机器人需要具备超强进的动力系统,也需要满足防震动撞击性和防水、防尘等有优秀性能的情况下,保证移动机器人底盘的精准控制和灵活的运动系统。凭借硬核的外观结构设计与全面的性能配置,使其成为企业、大学、科研院所开发特殊作业机器人的核心载体平台,为巡检、勘探、消防等多元场景提供稳定可靠的移动解决方案。

四轮四驱差速机器人底盘,它采用创新式多悬挂组合设计,搭配全车覆盖的加强版避震器组合,就像 “缓冲垫” 一样化了移动机器人形式在一些碎石路段中的颠簸与震动;再加上独特的防撞击结构设计,如同为底盘穿上 “防护甲”,极大减少了野外碎石、崎岖路面带来的冲击损伤。三重防护设计叠加,让底盘轻松满足重载、防震、越野三大核心要求,同时机器人的封闭式机体有着高防水等级的对外通讯和供电接口等设计,在各种复杂挑战性路段中移动机器人即便承载精密仪器,也能在复杂颠婆地形中保持稳定行驶,为移动机器人的安全运行筑牢基础。

移动机器人中的动力系统搭载四轮独立驱动与4x400W 大扭矩伺服电机,强劲动力可驱动机器人轻松翻越陡坡、跨过障碍,在草地、石泥路等阻力较大的环境中也能顺畅行驶;四轮独立悬架进一步优化了机器人底盘的接地效果,确保在凹凸不平的路面上始终保持平稳,避免因颠簸影响机器人的平衡性。
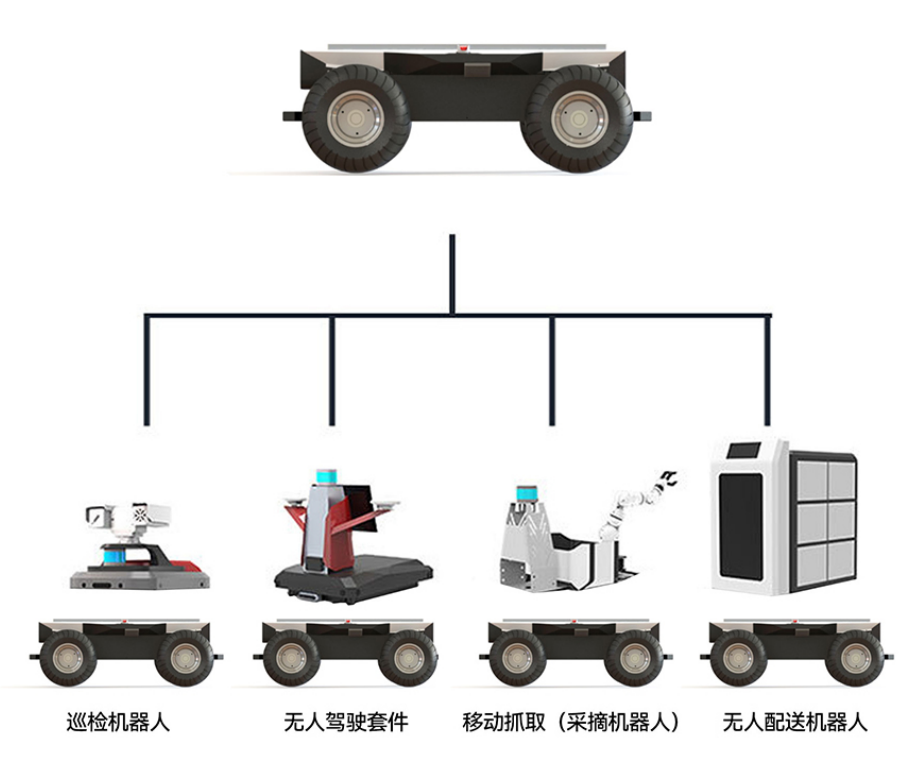
作为全域式越野移动机器人底盘有着极强的环境适应能力。在野外环境中,它能平稳穿梭于树林、沟壑之间,为勘探机器人提供稳定移动平台;面对草地环境,大扭矩电机可轻松克服杂草缠绕阻力,保障农业采摘机器人高效作业;即便是遍布碎石、泥泞的石泥路,多悬挂与避震系统的协同作用,也能减少冲击,让工程勘察机器人精准完成数据采集。全域式越野移动机器人,打破了传统底盘对作业环境的限制,让特殊作业机器人在高挑战性场景中也能 “大展拳脚”。
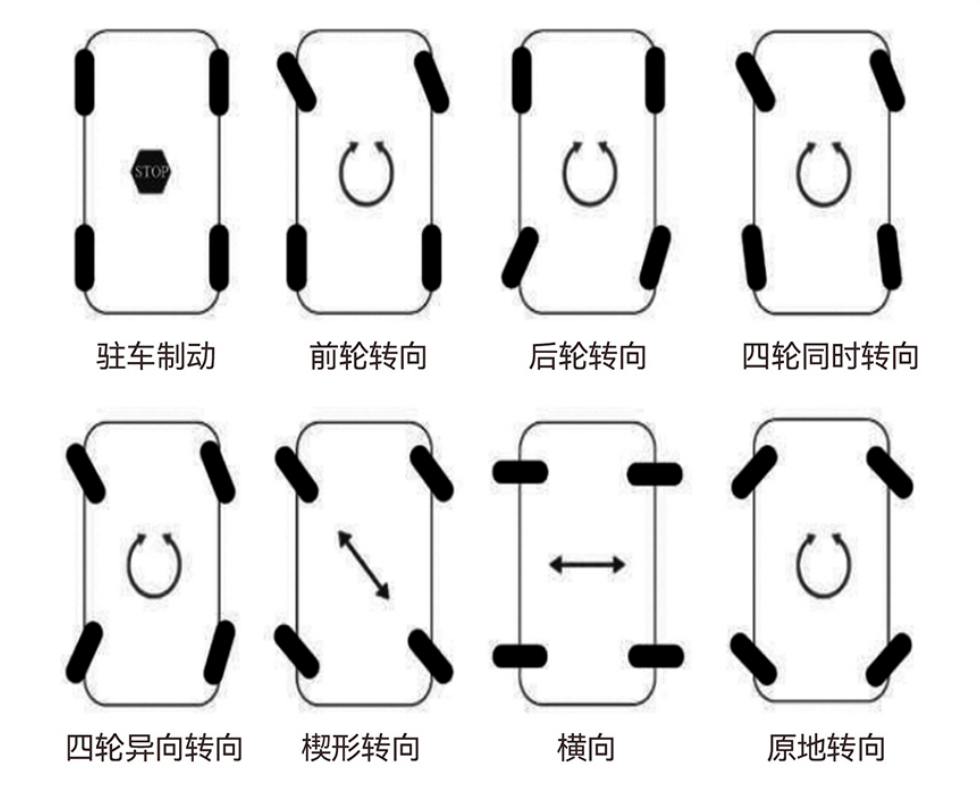
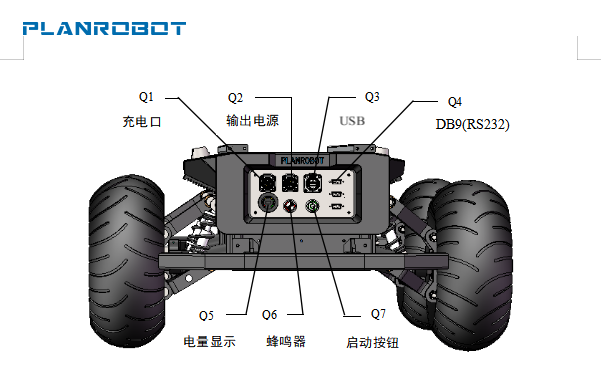
四轮四驱差速移动机器人平台有着大空间大承载力,可以在原地自旋过程中保持设备平衡承载重量可达100kg,这意味这移动机器人平台可以轻松搭载各类机械设备。用户可通过
CAN总线协议与主控通讯,快速接入传感系统,搭建自主应用开发平台,同时移动机器人还支持化高级模式,提供开源ROS/SDK/API。
移动机器人底盘有着精准匹配企业、大学、科研院所的多样化诉求。企业可借助其快速开发专属特殊作业机器人,无需从零搭建底盘,大幅缩短产品研发周期,提升市场响应速度;大学将其用于机器人专业教学,能让学生通过实操掌握 ROS 开发、底盘控制等核心技术,培养实践能力;科研院所则可依托其稳定性能,开展复杂环境下机器人运动控制、路径规划等前沿研究,加速技术成果转化。
深圳普蓝机器人的超强承重越野性移动机器人底盘,独立四轮悬架与独立四轮驱动机械结构设计,拥有强大的动力系统和卓越的稳定性,以 “硬核结构 + 全面性能 + 广泛适配” 的优势,为特殊作业机器人的开发与部署提供了强力支撑。