基于Matlab多技术融合的红外图像增强方法研究
红外图像在低照度、强干扰和复杂环境下具有较强的成像能力,但受传感器噪声、成像条件及大气衰减等因素影响,原始红外图像往往存在对比度低、细节模糊及光照不均等问题。本文针对红外图像质量退化的特点,提出了一种基于多算法融合的红外图像增强方法。该方法集成了 Retinex、多尺度直方图均衡、同态滤波以及暗通道先验引导滤波四类典型增强算法,通过 GUI 平台实现一键加载、处理与结果对比;同时,利用信息熵、对比度及亮度三种客观评价指标对不同方法的增强效果进行量化分析。实验在多组红外样本图像上进行了验证,结果表明,所提系统能够有效改善红外图像的整体亮度与细节对比度,抑制噪声和光照不均,且可为不同场景下的红外图像处理提供灵活可扩展的工具平台。
作者:张家梁(自研改进)
引言
红外成像技术在夜间监控、目标识别、医疗检测及军事侦察等领域得到了广泛应用。与可见光成像相比,红外图像不依赖环境光照,能够在低照度和恶劣天气条件下提供目标的热辐射信息。然而,由于红外传感器固有的动态范围限制,以及成像过程中受大气衰减、热噪声及光学系统影响,红外图像常常表现出对比度不足、细节信息缺失、光照分布不均匀等缺陷。这些问题不仅降低了图像的可视性,还会影响后续的自动检测与识别任务。
针对红外图像质量退化问题,研究者提出了多种图像增强方法,大致可分为三类:
(1)基于空间域的直方图均衡及其改进方法,通过调整像素灰度分布提升整体对比度;
(2)基于频率域的同态滤波,利用频域处理分离照明分量与反射分量,均衡亮度同时增强细节;
(3)基于成像机理的先验模型,如暗通道先验去雾,可在一定程度上消除大气散射影响。此外,Retinex理论基于人类视觉感知模型,在色彩恒常性和细节恢复方面表现出较好的效果。
本文在分析上述典型算法的基础上,构建了一个集成 Retinex、多尺度直方图均衡、同态滤波以及暗通道先验引导滤波的红外图像增强平台。平台采用 MATLAB GUI 进行可视化设计,用户可在界面中加载红外图像,选择不同增强方法,并通过信息熵、对比度及亮度三种客观指标对比增强效果。这种多算法融合与可视化评估的方式,不仅便于研究者分析算法优缺点,也为实际工程应用提供了灵活、高效的工具支持。
系统架构
1.系统概述
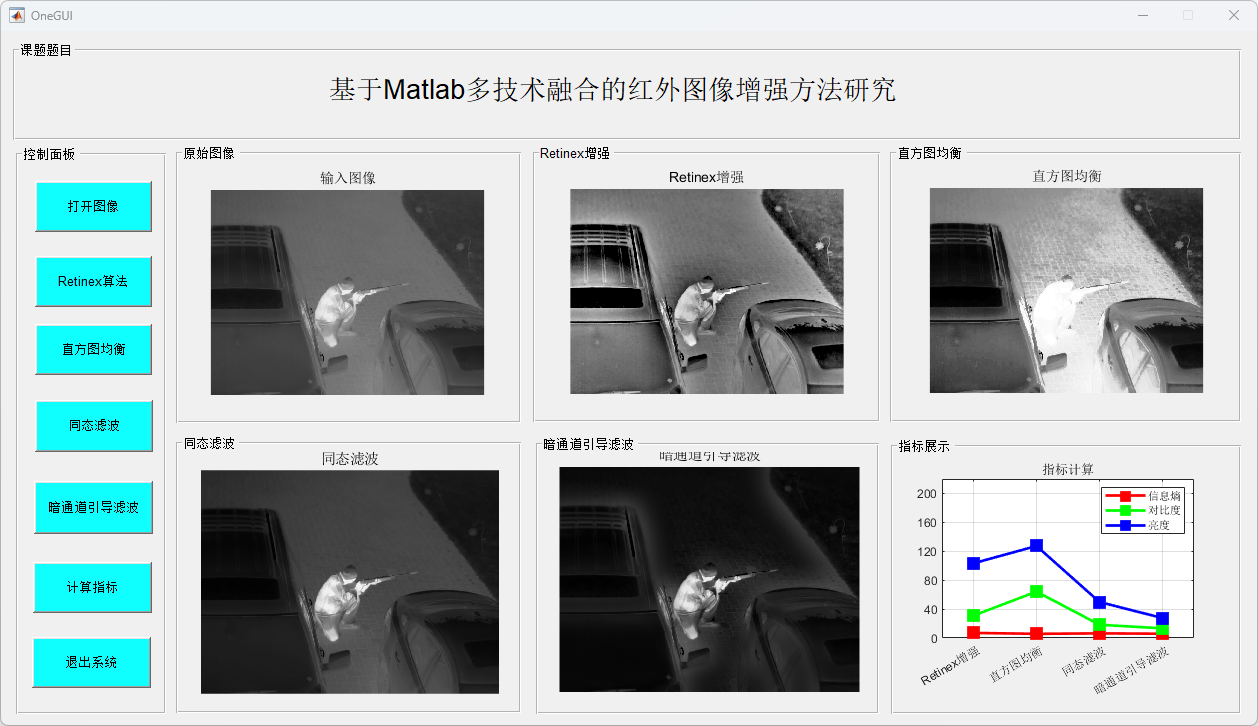
本系统旨在实现红外图像的自动增强与质量评价,通过多种图像增强算法与客观评价指标,对输入的红外图像进行细节强化、亮度与对比度优化,并以可视化方式向用户展示处理结果及其评价分数。系统采用 MATLAB 平台开发,结合 GUIDE 图形用户界面,实现了操作简单、处理快速、算法切换灵活以及增强效果可量化的特点。
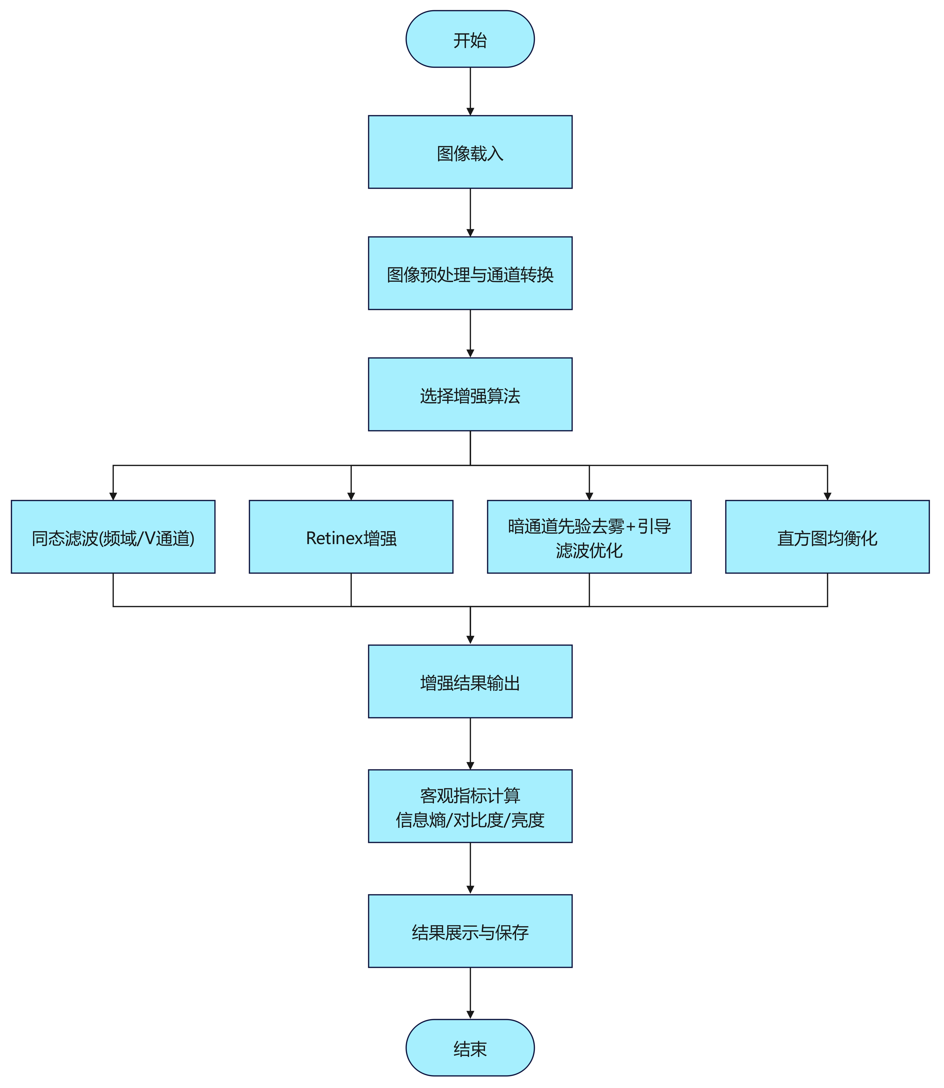
系统整体由图形界面层、业务逻辑层和图像增强与评价核心模块组成:
图形界面层(GUI):图像载入、算法选择、参数设置、处理执行与结果展示。
业务逻辑层:调用增强与评价模块,返回结果并可视化。
图像增强与评价核心模块:
(1)预处理与通道转换(RGB→灰度/HSV)
(2)增强算法:同态滤波、Retinex、暗通道去雾+引导滤波、直方图均衡化
(3)评价指标:信息熵、对比度、亮度
(4)结果输出与保存
2.系统流程图
研究方法
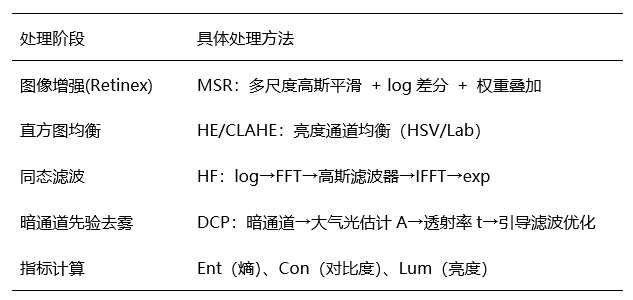
本研究提出一种基于Matlab的多技术融合红外图像增强方法,综合利用MSR、HE、HF和DCP+GF实现细节突出、对比度提升、照度均衡与去雾增强。
实验结果
实验结果表明:多种增强方法(Retinex、直方图均衡、同态滤波、暗通道引导滤波)均能改善红外图像质量,其中各算法在细节清晰度、对比度提升和亮度均衡方面表现各异。
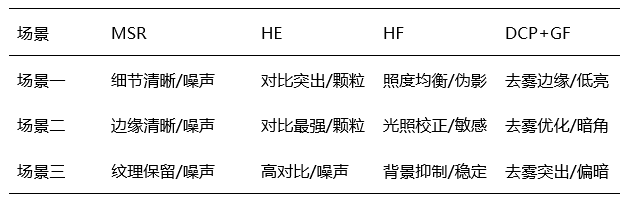
实验结果表明:MSR 适于细节检测、HE 强化对比度、HF 稳定应对光照不均、DCP+GF 去雾效果最佳但亮度不足。
1.实验过程
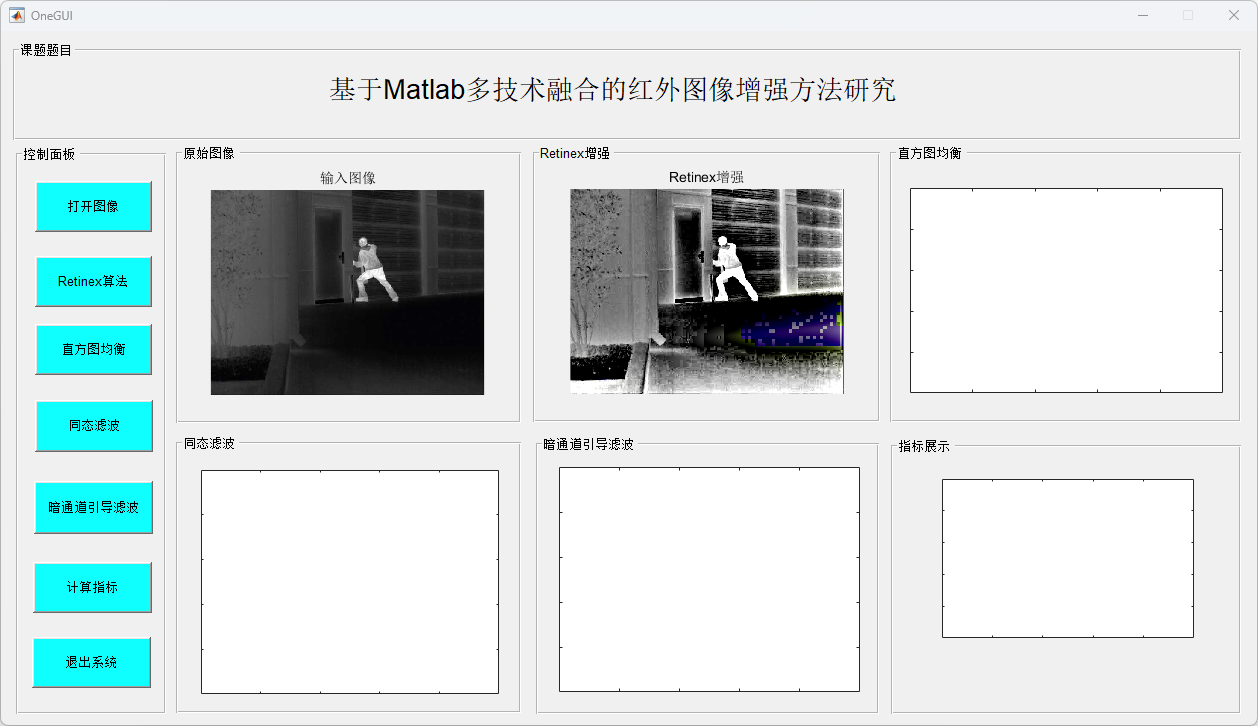
图1 原始输入图像
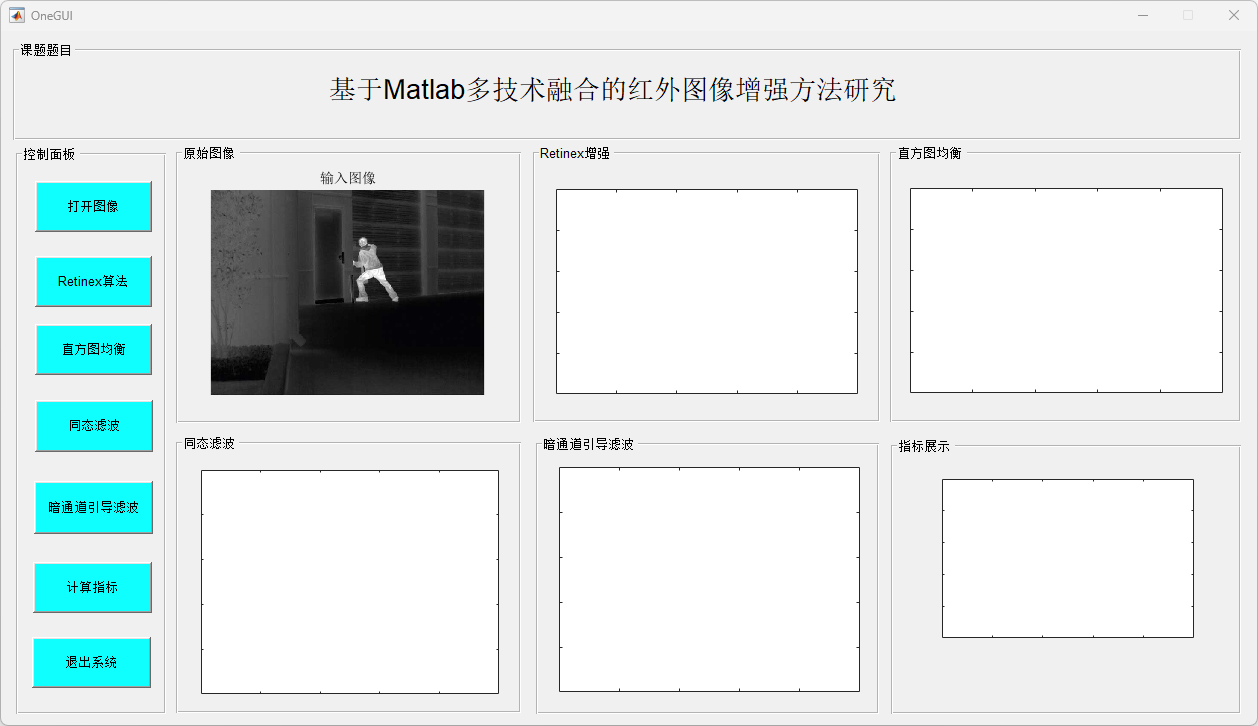
打开图像后,只显示输入图像,其余区域为空。
图2 Retinex增强结果
在“Retinex增强”区域显示结果,其它模块仍为空。
图3 直方图均衡结果

Retinex增强和直方图均衡模块均显示结果。
图4 同态滤波结果

Retinex增强、直方图均衡、同态滤波均显示结果。
图5 暗通道引导滤波 + 指标展示
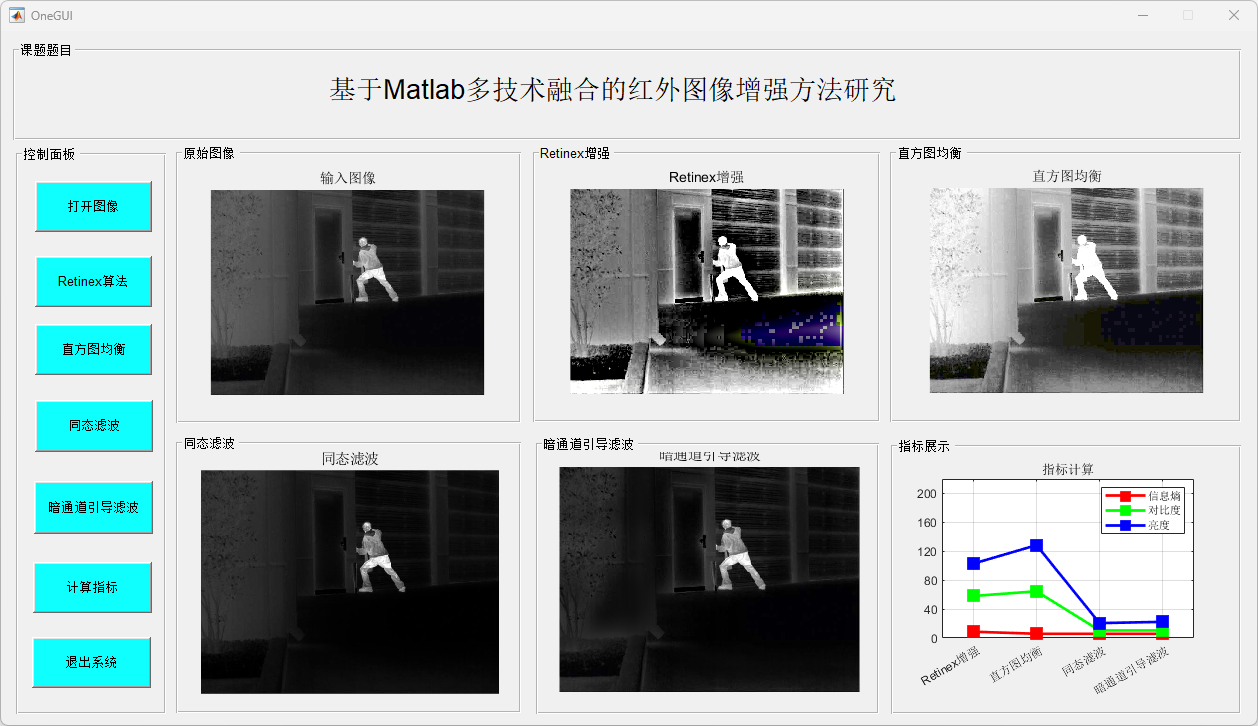
全部结果展示完成,并显示信噪比、对比度、亮度指标图。
2.实验结果
图1:红外图像增强实验结果(场景一)
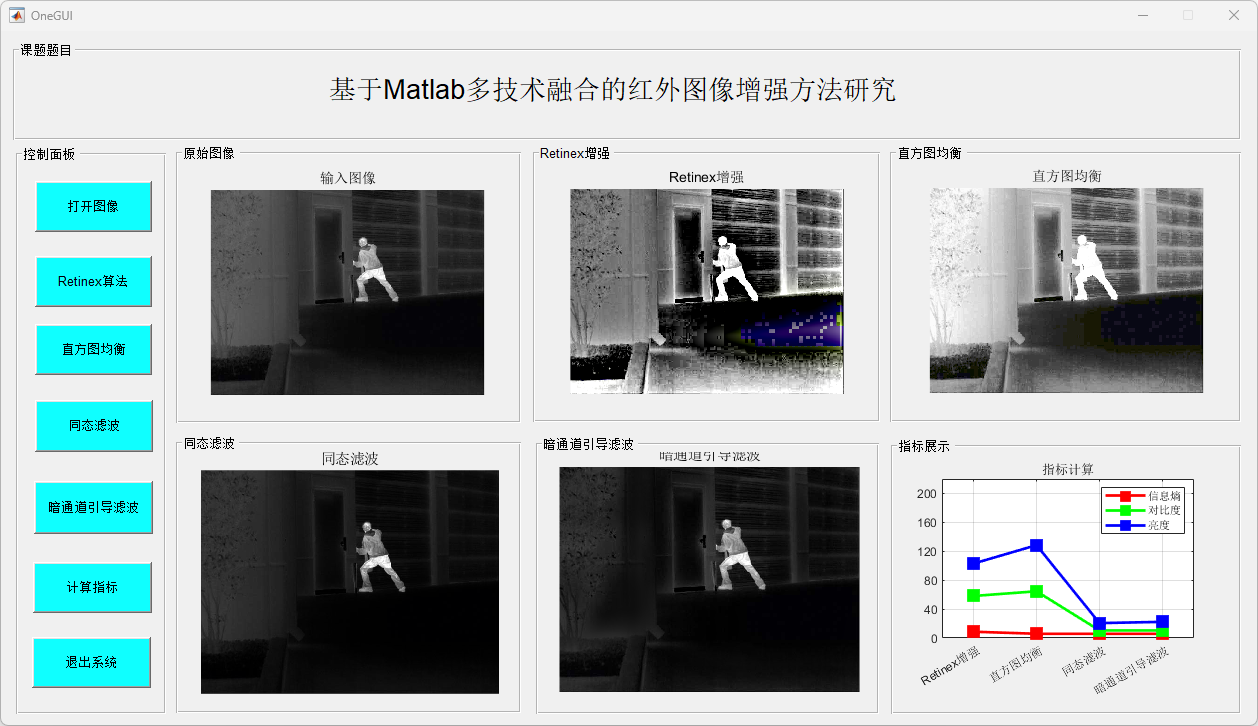
图2:红外图像增强实验结果(场景二)
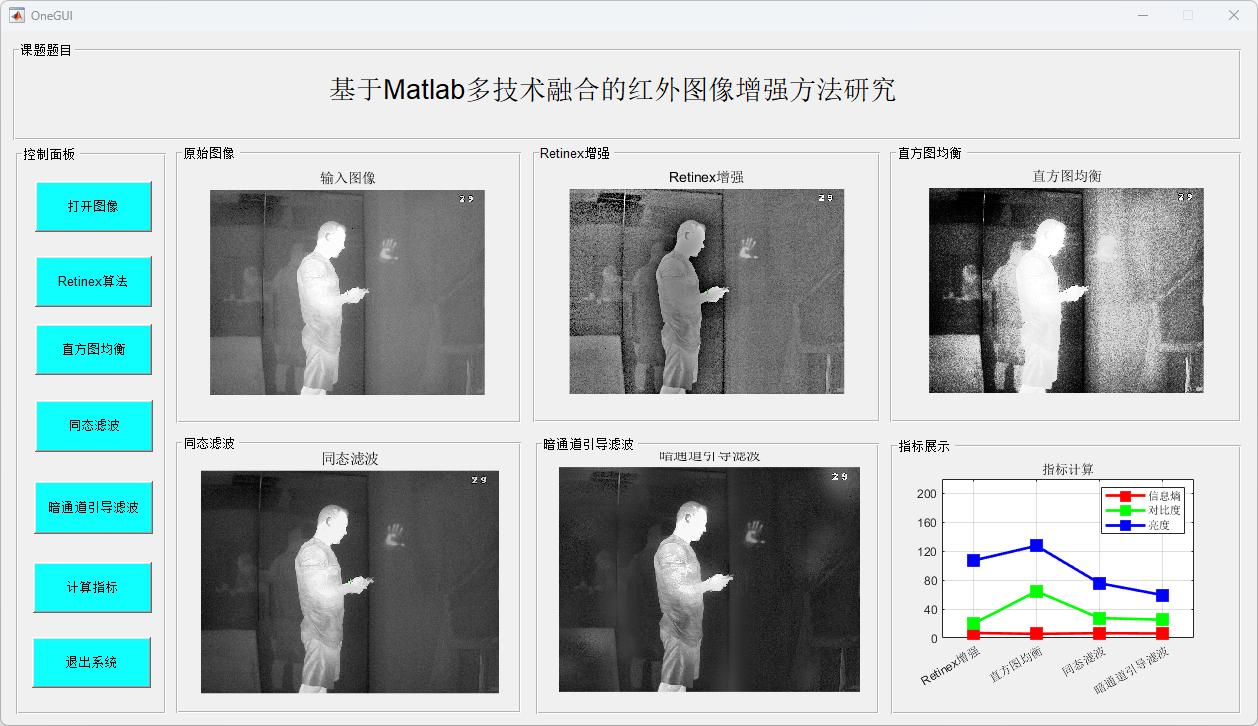
图3:红外图像增强实验结果(场景三)
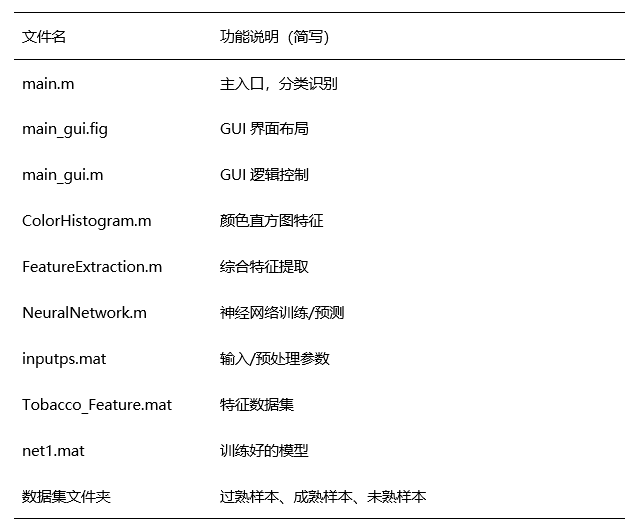
系统实现
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
实验结果表明,基于Matlab的多技术融合红外图像增强方法能够有效提升图像的细节、对比度和清晰度,不同算法在细节增强、对比度提升、照度均衡和去雾复原方面各具优势,为红外图像处理与应用提供了可靠的技术支持。
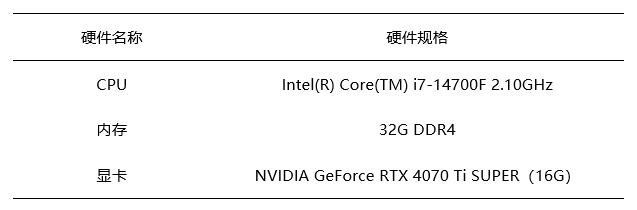
实验环境
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。