软件设计师——数据结构与算法基础学习笔记
一、数据结构与算法基础
数据结构与线性表
1. 下三角矩阵元素存储位置计算:
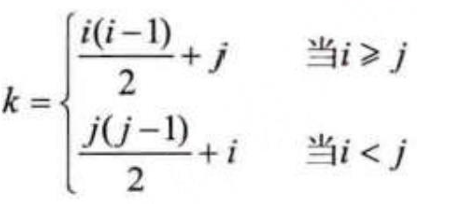
三对角矩阵是指除了主对角线及其相邻的两条对角线(上对角线和下对角线)外,其他位置的元素均为0的矩阵。
非零元素仅出现在以下位置:
主对角线 (i = j):肯定有元素。
主对角线之上的一条对角线 (i = j - 1):有元素。这条线也称为上对角线或上次对角线。
主对角线之下的一条对角线 (i = j + 1):有元素。这条线也称为下对角线或下次对角线。
非零元素的总数为:
- 第一行:2个
- 中间 n−2n−2 行:每行3个 → 3×(n−2)
- 最后一行:2个
总计:3n−2
常用一维数组,按行优先存储,映射公式:k = 2i + j - 3
2. 队列的特性应用:
队列是一种遵循先进先出原则的线性数据结构,支持在队尾插入元素(入队)和队头删除元素(出队)。核心特性包括:
有序性:元素按插入顺序排列,先进入队列的元素优先被处理。
操作受限:仅允许在两端操作,不支持随机访问。
队列的典型应用场景: 任务调度与消息处理 广度优先搜索(BFS) 缓冲区管理 多线程同步 实时系统请求处理
3. 栈的特性应用:
栈是一种线性数据结构,遵循后进先出原则。最后压入栈的元素最先被弹出。栈的核心操作包括:
Push:将元素压入栈顶。
Pop:移除并返回栈顶元素。
Peek/Top:获取栈顶元素但不移除。
栈的典型应用场景: 函数调用与递归 表达式求值 括号匹配 浏览器历史记录 撤销操作
树
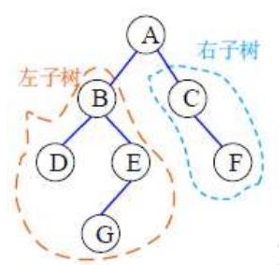
二叉树是一种树形数据结构,每个节点最多有两个子节点,通常称为左子节点和右子节点。
二叉树是许多高级数据结构(如二叉搜索树、堆、AVL树)的基础。
在树结构中,以下关系总是成立:
总结点数 = 叶子结点数 + 度为1的结点数 + 度为2的结点数 + … + 度为k的结点数。
总分支数(即树中所有结点的子节点总数) = 1 × 度为1的结点数 + 2 × 度为2的结点数 + … + k × 度为k的结点数。
在树中,总结点数 = 总分支数 + 1(因为根节点没有父节点,其他结点都有一个父节点)。
1. 二叉树的特性:
(1)在二叉树的第i层上最多有2i-1个结点(i≥1)。
(2)深度为k的二叉树最多有2k-1个结点(k≥1)。
(3)对于任何一棵二叉树,如果其叶子结点数为n0,度为2的结点数为n2,则n0=n2+1。
(4)具有n个结点的完全二叉树的深度为[log2n] +1。
(5)如果对一棵有n个结点的完全二叉树的结点按层序编号(从第1层到[log2n]+1层,每层从左到右),则对任一结点i(1≤i≤n)有:
1)如果i=1,则该结点是二叉树的根,无双亲;如果i>1,则该结点是i/2。
2)如果2i≤n,则该结点左子树的编号是2i;否则,无左子树。
3)如果2i+1≤n,则该结点右子树的编号是2i+1;否则,无右子树。
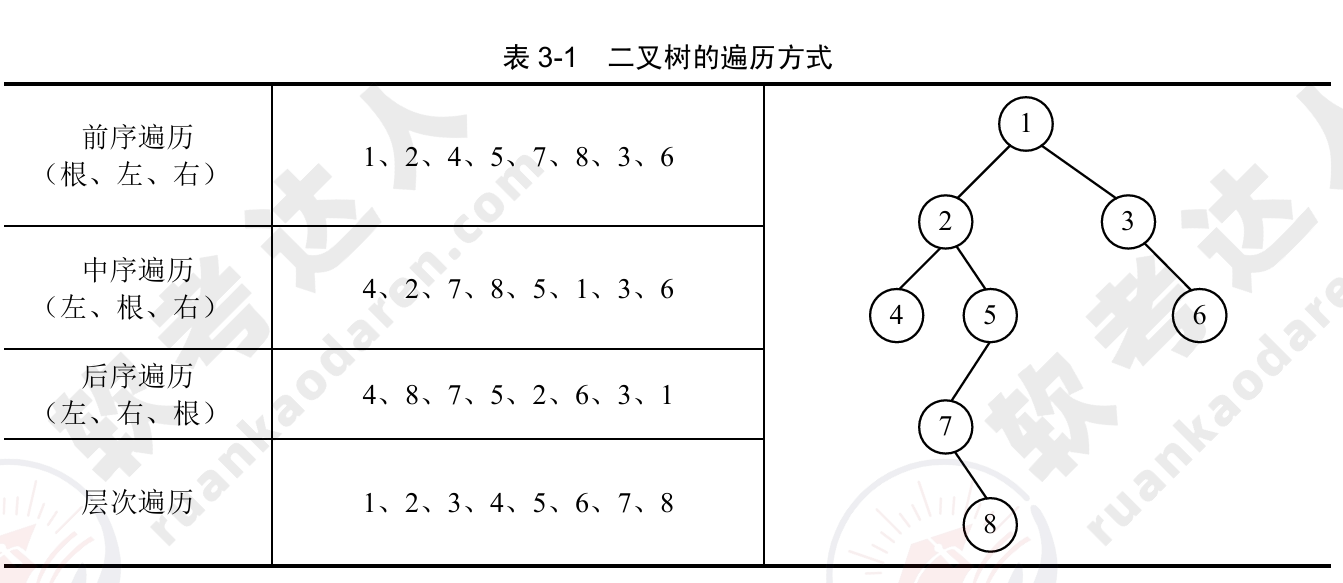
2.二叉树的遍历:
- 前序遍历(Pre-order):访问根节点 → 遍历左子树 → 遍历右子树。
- 中序遍历(In-order):遍历左子树 → 访问根节点 → 遍历右子树。
- 后序遍历(Post-order):遍历左子树 → 遍历右子树 → 访问根节点。
- 层次遍历(Level-order):按层从上到下访问节点,通常使用队列实现。
3. 特殊二叉树类型
完全二叉树:除最后一层外,其他层节点均填满,且最后一层节点靠左排列。常用于堆的实现。
满二叉树:所有非叶子节点都有两个子节点,且所有叶子节点在同一层。
二叉搜索树(BST):左子树所有节点值小于根节点,右子树所有节点值大于根节点。中序遍历结果为有序序列。
平衡二叉树(AVL树):任意节点的左右子树高度差不超过1,通过旋转操作保持平衡。
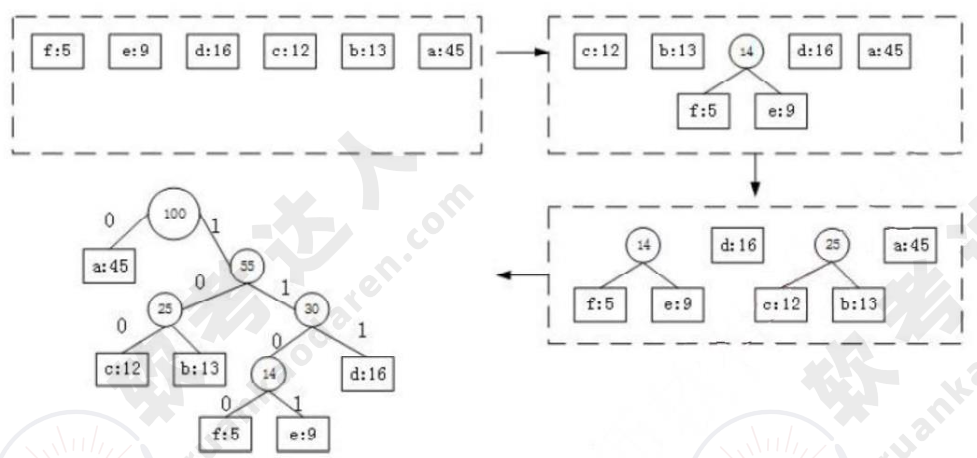
3.哈夫曼树(最优二叉树):
哈夫曼树又称为最优二叉树,是一种带权路径长度最短的二叉树。所谓树的带权路径长度,就是树中所有的叶子结点的权值乘上其到根结点的路径长度(若根结点为0层,叶子结点到根结点的路径长度为叶子结点的层数)。
其核心思想是通过频率或权重分配编码,高频(高权重)的字符使用较短的编码,低频字符使用较长的编码,从而实现整体编码长度最小化。
哈夫曼编码的生成
从根节点出发,向左子树路径标记为 0,向右子树路径标记为 1。每个叶子节点的路径编码即为对应字符的哈夫曼编码。
压缩比=(定长-变长)/定长
图
1.图的存储结构:
(1)邻接矩阵。邻接矩阵表示法是指用一个矩阵来表示图中顶点之间的关系。对于具有n个
顶点的图G=(V,E),其邻接矩阵是一个n阶方阵且满足:

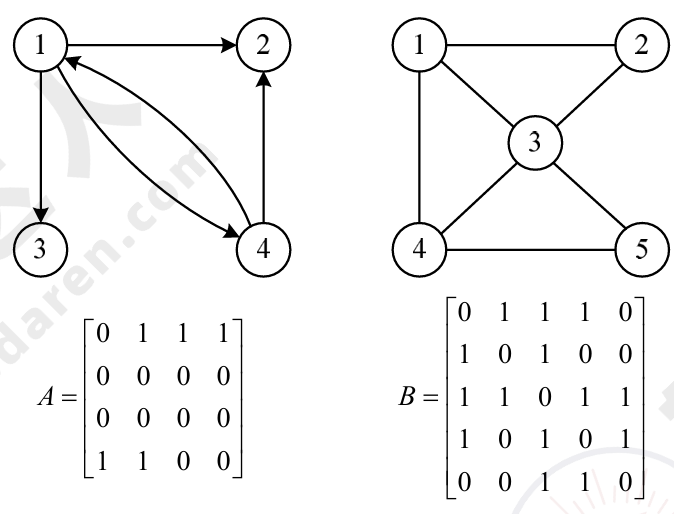
无向图的邻接矩阵是对称的,有向图的邻接矩阵则不一定对称。完全有向图的邻接矩阵也对称。
(2)邻接表。邻接表表示法是指为图中的每一个顶点建立一个单链表。
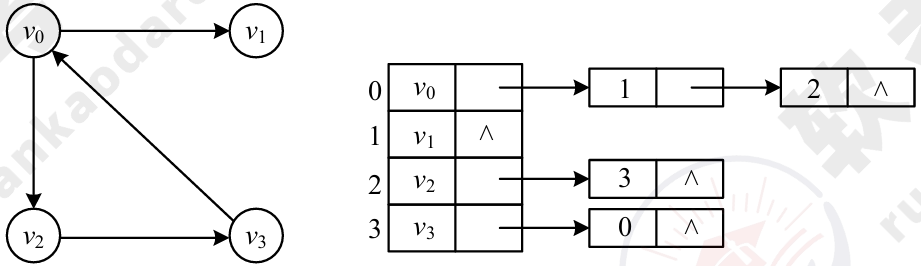
存储特点: 图中的顶点数决定了邻接矩阵的阶和邻接表中的单链表数目,无论是对有向图还是无向图,边数的多少决定了单链表中的结点数,而不影响邻接矩阵的规模,因此采用何种存储方式与有向图、无向图没有区别,要看图的边数和顶点数,完全图适合采用邻接矩阵存储。
查找与排序
1.顺序查找
将待查的元素从头到尾与表中元素进行比较,如果存在,则返回成功;否则,查找失败。此方法效率不高。顺序查找的平均查找长度为(n+1)/2。
顺序查找的方法对于顺序存储方式和链式存储方式的查找表都适用。
2.二分查找 (折半查找)
二分查找的前提是元素有序(一般是升序),基本思路是拿中间元素A[m]与要查找的元素x进行比较,如果相等,则表示找到;如果A[m]比x大,那么要找的元素一定在A[m]前边(左边);如果A[m]比x小,那么要找的元素一定在A[m]后边(右边)。每进行一次查找,数组规模减半。反复将子数组规模减半或使当前子数组为空,直到发现要查找的元素。

无论查找成功与否,折半查找的最大关键字比较次数均为: ⌊log2n⌋+1 \lfloor \log_2 n \rfloor + 1⌊log2n⌋+1
折半查找(二分查找)在有序数组中的时间复杂度为 O(log₂n)
3.哈希查找
设关键序列为47、34、13、12、52、38、33、27、3,哈希表长为11,哈希函数为Hash(key)=key
mod 11,则有:
Hash(47) = 47 mod 11= 3,Hash(34) = 34 mod 11= 1,Hash(13) =13 mod 11= 2,
Hash(12) = 12 mod 11= 4,Hash(52) = 52 mod 11= 8,Hash(38) = 38 mod 11= 5,
Hash(33) = 33 mod 11= 0,Hash(27) = 27 mod 11= 6,Hash(3) =3 mod 11= 7。
对于产生的冲突,哈希函数可以采用线性探测法解决冲突,哈希地址和关键字的对应关系如表所示。

4. 排序


5. 直接插入排序
在插入第i个记录时,R1,R2,…,Ri-1均已排好序,这时将第i个记录依次与Ri-1,…,R2,R1进行比较,找到合适的位置插入,插入位置及之后的记录依次向后移动。
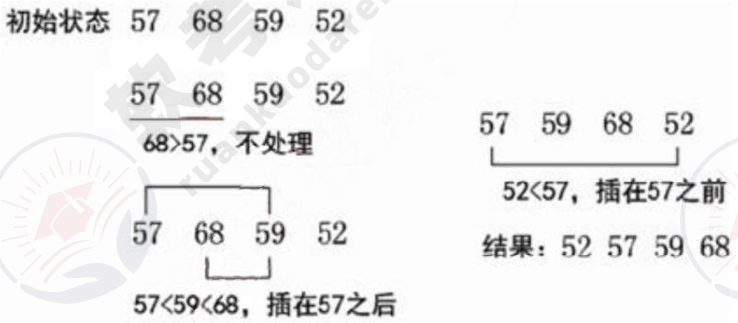
直接插入排序在最好情况下的时间复杂度为O(n),在最坏情况下的时间复杂度为O(n2)。
6.冒泡排序
通过相邻元素(i 与 i-1)之间的比较和交换,将排序码较小的元素逐渐从底层移向顶层。整个过程像水底的气泡逐渐向上冒,由此而得名冒泡排序。冒泡排序的时间复杂度为O(n2)。
7.简单选择排序
每一趟从待排序的数据元素中选出最小的元素,顺序放在待排序数列的最前面,直到全部待排
序的数据元素全部排完。简单选择排序的时间复杂度为O(n2)。
8.快速排序
快速排序是对冒泡排序的一种改进。基本思路是:通过一趟排序将要排序的数据分成独立的两个部分,其中一部分的所有数据都比另外一部分的所有数据要小,然后再按此方法对这两部分数据分别进行快速排序,整个排序过程可以递归进行,以此达到整个数据变成有序序列。
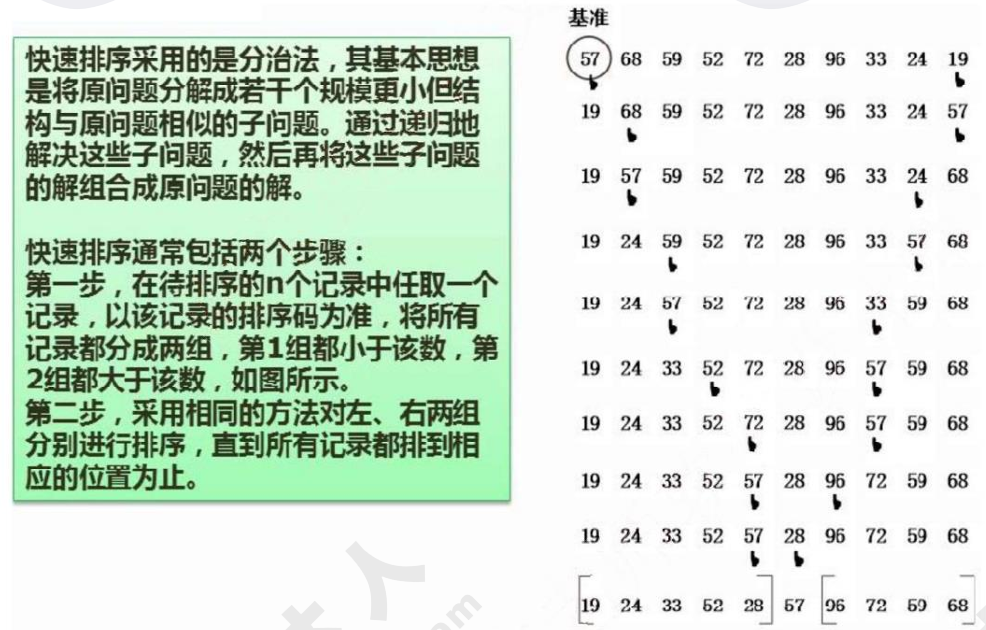

快速排序在最好情况下的时间复杂度为O(nlog2n);在最坏情况下,即初始序列按关键字有序或基本有序时,快速排序的时间复杂度为O(n2)。
9.堆排序
对于n个元素的序列,当且仅当满足下列关系时称其为堆,其中,2i 和 2i+1不大于n。
其中,前者称为小顶堆,后者称为大顶堆。
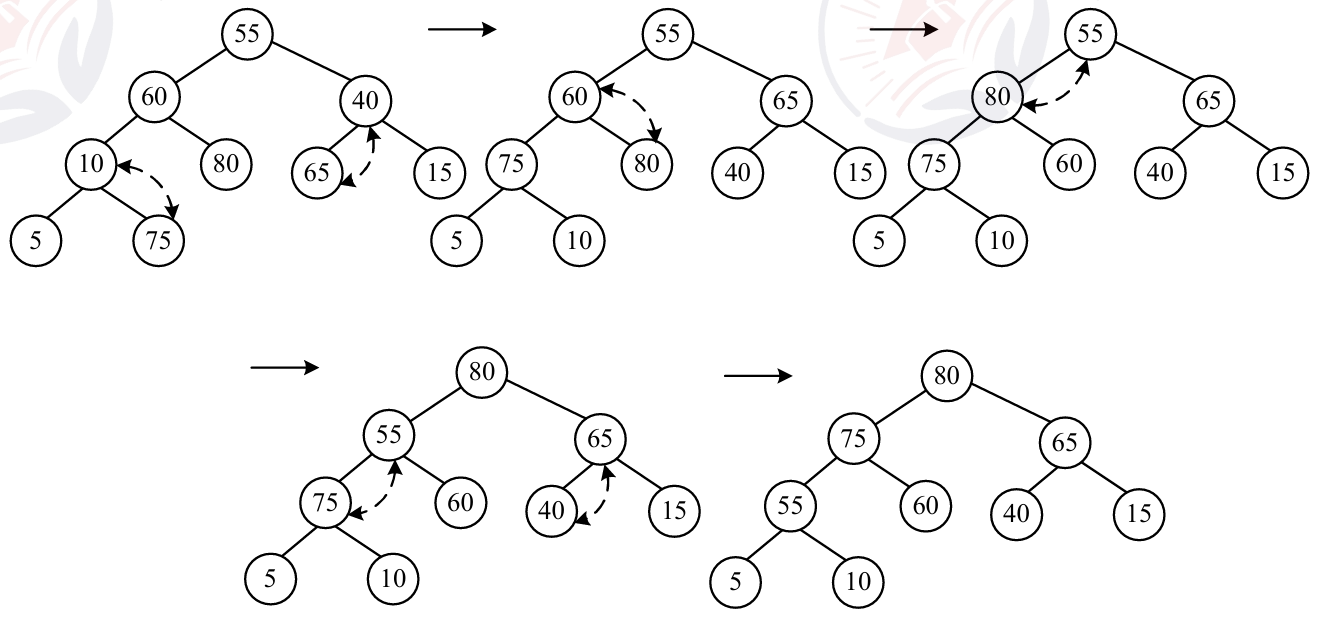
堆排序的基本思路是:对于一组待排序记录的关键字,首先按堆的定义排成一个序列(建立初始堆),之后输出堆顶最大关键字(对于大顶堆而言),然后将剩余的关键字再调整成新堆,从而得到次大关键字,如此反复,直到全部关键字排成有序序列为止。堆排序(以大顶堆为例)的建立过程与调整新堆的过程如图所示。堆排序的时间复杂度为O(nlog2n)。
10.归并排序
所谓“归并”,是将两个或两个以上的有序文件合并成为一个新的有序文。归并排序过程分为三步:
(1)分解。将n个元素分成各含n/2个元素的子序列。
(2)求解。用归并排序对两个子序列递归地排序。
(3)合并。合并两个已经排好序的子序列以得到排序结果。
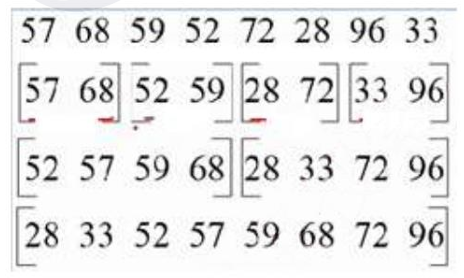
归并排序的时间复杂度为O(nlog2n)。
以下是符合Markdown格式的排序算法对比表格:
11. 排序算法对比
| 排序算法 | 平均时间复杂度 | 最坏时间复杂度 | 最好时间复杂度 | 空间复杂度 | 稳定性 | 适用场景 |
|---|---|---|---|---|---|---|
| 冒泡排序 | O(n²) | O(n²) | O(n) | O(1) | 稳定 | 小规模数据或基本有序 |
| 选择排序 | O(n²) | O(n²) | O(n²) | O(1) | 不稳定 | 小规模数据 |
| 插入排序 | O(n²) | O(n²) | O(n) | O(1) | 稳定 | 小规模或部分有序数据 |
| 希尔排序 | O(n log n) | O(n²) | O(n log n) | O(1) | 不稳定 | 中等规模数据 |
| 归并排序 | O(n log n) | O(n log n) | O(n log n) | O(n) | 稳定 | 大规模数据,需额外空间 |
| 快速排序 | O(n log n) | O(n²) | O(n log n) | O(log n) | 不稳定 | 大规模数据,通用场景 |
| 堆排序 | O(n log n) | O(n log n) | O(n log n) | O(1) | 不稳定 | 大规模数据,无需额外空间 |
| 计数排序 | O(n + k) | O(n + k) | O(n + k) | O(k) | 稳定 | 非负整数,范围较小 |
| 基数排序 | O(n × k) | O(n × k) | O(n × k) | O(n + k) | 稳定 | 非负整数,位数较少 |
算法基础知识
1. 时间复杂度分析
主定理的核心思想
主定理(Master Theorem)提供了一种快速求解分治算法递归式的方法,特别适用于形式如 T(n)=aT(n/b)+f(n)T(n) = aT(n/b) + f(n)T(n)=aT(n/b)+f(n) 的递归关系,其中:
- aaa 是子问题的数量;
- n/bn/bn/b 是每个子问题的规模;
- f(n)f(n)f(n) 是合并子问题结果的开销。
主定理的三种情况
情况一:叶子层开销主导
如果 f(n)f(n)f(n) 的增长速度慢于 nlogban^{\log_b a}nlogba,即 f(n)=O(nlogba−ϵ)f(n) = O(n^{\log_b a - \epsilon})f(n)=O(nlogba−ϵ)(ϵ>0\epsilon > 0ϵ>0),则递归的解由叶子层的操作决定:
T(n)=Θ(nlogba)T(n) = \Theta(n^{\log_b a})T(n)=Θ(nlogba)
情况二:各层开销平衡
如果 f(n)f(n)f(n) 和 nlogban^{\log_b a}nlogba 同阶,即 f(n)=Θ(nlogbalogkn)f(n) = \Theta(n^{\log_b a} \log^k n)f(n)=Θ(nlogbalogkn)(k≥0k \geq 0k≥0),则解为:
T(n)=Θ(nlogbalogk+1n)T(n) = \Theta(n^{\log_b a} \log^{k+1} n)T(n)=Θ(nlogbalogk+1n)
常见的是 k=0k=0k=0,此时 T(n)=Θ(nlogbalogn)T(n) = \Theta(n^{\log_b a} \log n)T(n)=Θ(nlogbalogn)。
情况三:合并开销主导
如果 f(n)f(n)f(n) 增长快于 nlogban^{\log_b a}nlogba,即 f(n)=Ω(nlogba+ϵ)f(n) = \Omega(n^{\log_b a + \epsilon})f(n)=Ω(nlogba+ϵ)(ϵ>0\epsilon > 0ϵ>0),且满足正则条件 af(n/b)≤cf(n)af(n/b) \leq cf(n)af(n/b)≤cf(n)(c<1c < 1c<1),则解由合并操作决定:
T(n)=Θ(f(n))T(n) = \Theta(f(n))T(n)=Θ(f(n))
直观理解
- 情况一:递归树的叶子节点(最底层)操作数量最多,总时间由叶子层决定。
- 情况二:每一层的操作数量相近,总时间是层数×每层时间。
- 情况三:根节点(合并步骤)的开销最大,总时间由合并步骤主导。
经典例子
-
二分查找:T(n)=T(n/2)+Θ(1)T(n) = T(n/2) + \Theta(1)T(n)=T(n/2)+Θ(1)
属于情况二,a=1,b=2a=1, b=2a=1,b=2,f(n)=Θ(1)f(n)=\Theta(1)f(n)=Θ(1),nlogba=1n^{\log_b a}=1nlogba=1,故 T(n)=Θ(logn)T(n)=\Theta(\log n)T(n)=Θ(logn)。 -
归并排序:T(n)=2T(n/2)+Θ(n)T(n) = 2T(n/2) + \Theta(n)T(n)=2T(n/2)+Θ(n)
属于情况二,a=2,b=2a=2, b=2a=2,b=2,f(n)=Θ(n)f(n)=\Theta(n)f(n)=Θ(n),nlogba=nn^{\log_b a}=nnlogba=n,故 T(n)=Θ(nlogn)T(n)=\Theta(n \log n)T(n)=Θ(nlogn)。 -
快速排序(平均情况):T(n)=2T(n/2)+Θ(n)T(n) = 2T(n/2) + \Theta(n)T(n)=2T(n/2)+Θ(n)
与归并排序相同,解为 Θ(nlogn)\Theta(n \log n)Θ(nlogn)。