OpenCV学习 day5
一、图像轮廓特征查找
图像轮廓特征查找其实就是他的外界轮廓
- 应用:
- 图像分割
- 形状分析
- 物体检测与识别
图像轮廓特征查找根据轮廓点进行,所以要先找到轮廓。
- 对图像先灰度化、二值化。目标物体白色,非目标物体黑色,选择合适的二值化方法
- 有了了轮廓点就可以找到最上、最下、最左、最右的四个坐标,就可以绘制矩形。
1、外接矩形(非旋转)
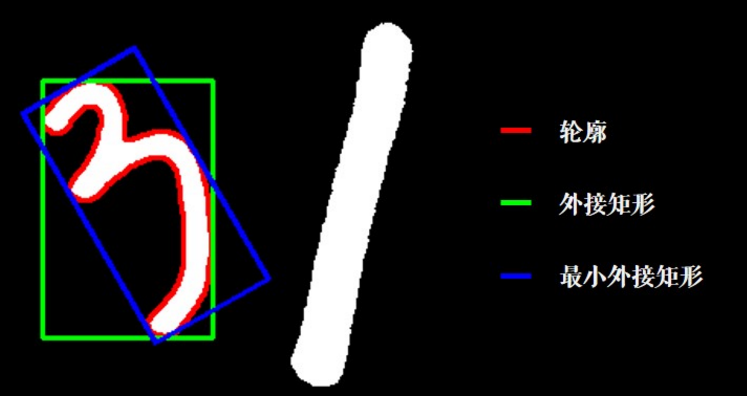
形状的外接矩形有两种,如下图,绿色的叫外接矩形,表示不考虑旋转并且能包含整个轮廓的矩形。其中,外接矩形可根据获得到的轮廓坐标中最上、最下、最左、最右的点的坐标来绘制外接矩形,也就是下图中的绿色矩形。蓝色的是最小外接矩形,会考虑面积。
API及说明:
boundingRect(轮廓点)
作用:
用于计算轮廓的直立矩形(非旋转)的函数,其返回值是一个四元组 (x, y, w, h),数据类型为int,表示能完全包围轮廓的最小正矩形(无旋转)。
boundingRect函数,输入的是轮廓点,所以在运行过程中我们需要对图像的轮廓点进行查找检测、遍历提取,再将遍历的返回值输入进boundingRect函数
OpenCV代码实现:
import cv2 as cv
#读图
img = cv.imread("../../images/666.png")
img1 = cv.resize(img,(400,400))
# print(img.shape)
#灰度化
gray = cv.cvtColor(img1, cv.COLOR_BGR2GRAY)
cv.imshow("gray", gray)#二值化
_,binary = cv.threshold(gray, 120, 255, cv.THRESH_OTSU + cv.THRESH_BINARY_INV)
cv.imshow("binary", binary)#查找轮廓
conts,hie = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)#轮廓特征查找,外接矩形 多条轮廓,遍历
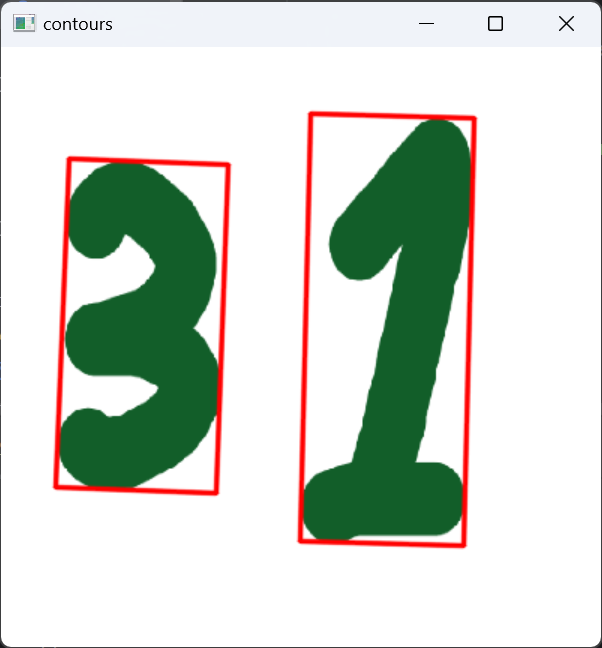
for cont in conts:#x,y:外接矩形的左上角坐标;w,h:外接矩形的宽高#用于计算轮廓的直立矩形(非旋转)的函数,其返回值是一个四元组 (x, y, w, h),表示能完全包围轮廓的最小正矩形(无旋转)。x,y,w,h = cv.boundingRect(cont)print(x,y,w,h)#绘制外接矩形cv.rectangle(img1,(x,y),(x+w,y+h),(0,255,0),2)#显示效果
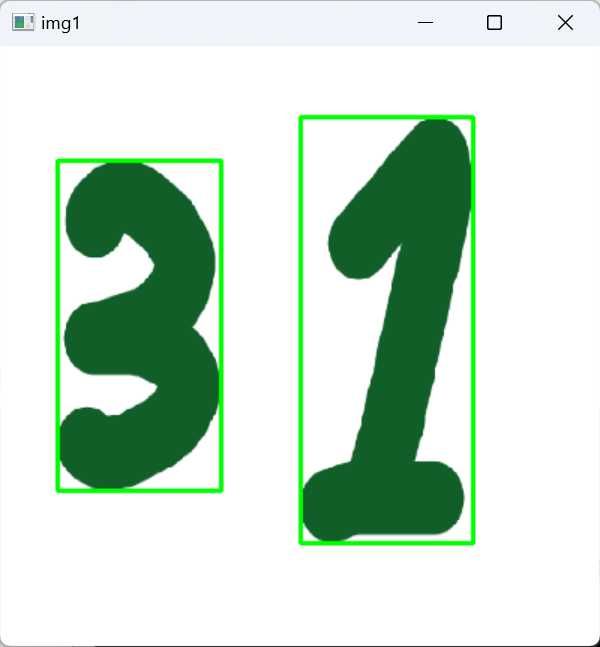
cv.imshow("contours", img1)
cv.waitKey(0)
cv.destroyAllWindows()
最终结果显示:
2、最小外接矩形
最小外接矩形是指能够完全包含给定二维形状(如点集、多边形等)且面积最小的矩形。这个概念在计算机图形学、地理信息系统(GIS)、模式识别等领域有广泛应用。
对于不规则图像,绘制的最小外接矩形通常是旋转的
计算方法,旋转卡壳法:
这是计算凸多边形最小外接矩形的经典算法:
- 计算点集的凸包
- 使用旋转卡壳技术,旋转矩形寻找最小面积
应用场景:
- 物体识别和检测
- 碰撞检测
- 地理空间数据分析
- 图像处理中的对象定位
API及说明:
contours,hierarchy=cv2.findContours(image_np_thresh,cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours为二值图像上查找所有的外部轮廓
具体参数说明在OpenCV学习 day4中提及
rect = cv2.minAreaRect(cnt)
上一个API的返回值contours表示获取到的轮廓点的列表。将列表遍历后作为输入(cnt)传入minAreaRect函数,然后就可以计算出每个轮廓的最小外接矩形
- rect 是计算轮廓最小面积外接矩形:返回值rect 结构通常包含中心点坐标 (x, y)、宽度 width、高度 height 和旋转角度 angle,也就是旋转矩形的数据元素
cv2.boxPoints(rect).astype(int)
cv2.boxPoints(rect)返回 是一个形状为 4行2列的数组,每一行代表一个点的坐标(x, y),也就是四个顶点坐标,顺序按照逆时针或顺时针方向排列
.astype(int)将浮点坐标转为整形(因像素坐标必须是整数)
最后一步:;连接四个顶点,在图像上绘制轮廓(绘制最小外接矩形)
cv2.drawContours(image, contours, contourIdx, color, thickness)
- image:原图像,一般为numpy数组,通常为灰度图或彩色图像
- contours:一个包含多个轮廓的列表,可以用上一个API得到的返回值,但必须使用[]中括号包裹,因为该函数的设计要求传入的是一个轮廓列表而不是单个轮廓(如果直接传入,会被误认欸多个轮廓点而非一个完整的轮廓)
- contourldx:要绘制的轮廓索引。如果设置为-1,则绘制所有轮廓。
- color:轮廓的颜色,可以是BGR颜色格式的三元组
- thickness:轮廓线的粗细,如果是正数,则绘制实线;如果是0,则绘制轮廓点;如果是负数,则填充内部区域。
OpenCV代码实现:
import cv2 as cv
import numpy as np#读图
img = cv.imread("../../images/666.png")
img1 = cv.resize(img,(400,400))
# print(img.shape)
#灰度化
gray = cv.cvtColor(img1, cv.COLOR_BGR2GRAY)#二值化
_,binary = cv.threshold(gray, 120, 255, cv.THRESH_OTSU + cv.THRESH_BINARY_INV)#查找轮廓
conts,hie = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)#最小外接矩形
#遍历所有检测到的轮廓
for c in conts:'''计算轮廓的最小外接旋转矩形(RotatedRect)返回值rect是一个元组,包含:((矩形中心x, 中心y), (宽度, 高度), 旋转角度)注:角度范围[-90,0],宽度可能小于高度'''rect = cv.minAreaRect(c)'''将旋转矩形转换为4个顶点坐标boxPoints返回格式:[[x1,y1], [x2,y2], [x3,y3], [x4,y4]].astype(int)将浮点坐标转为整型(因像素坐标必须是整数)'''dst = cv.boxPoints(rect).astype(int)print(dst)#在图像img1上绘制轮廓 [dst] - 将顶点列表作为单个轮廓传入(注意外层要加[])cv.drawContours(img1, [dst], -1, (0,0,255), 2,cv.LINE_AA)cv.imshow("contours", img1)
cv.waitKey(0)
cv.destroyAllWindows()
最终结果显示:
3、最小外接圆
最小外接圆是指能够完全包围给定轮廓或点集的最小圆形。
寻找最小外接圆使用的算法是Welzl算法。Welzl算法基于一个定理:希尔伯特圆定理表明,对于平面上的任意三个不在同一直线上的点,存在一个唯一的圆同时通过这三个点,且该圆是最小面积的圆(即包含这三个点的圆中半径最小的圆,也称为最小覆盖圆)。
应用场景:
- 目标尺寸测量:通过半径计算物体大小。
- 圆形物体检测:如检测瞳孔、硬币、气泡。
- 轮廓简化:用圆代替复杂轮廓进行碰撞检测。
与其他包围形状对比:
| 方法 | 函数 | 输出 | 适用场景 |
|---|---|---|---|
| 凸包 | cv.convexHull() | 凸多边形点集 | 轮廓凸性分析 |
| 直立矩形(AABB) | cv.boundingRect() | (x,y,w,h) | 快速区域提取 |
| 最小外接旋转矩形 | cv.minAreaRect() | 旋转矩形(中心、尺寸、角度) | 任意方向的长条形物体 |
| 最小外接圆 | cv.minEnclosingCircle() | 圆心 + 半径 | 圆形物体 |
API及说明:
cv2.minEnclosingCircle(points) > 返回值 (center, radius)
- points:输入目标图像的轮廓数据。通常遍历得到。
- 返回值:
- center:一个包含圆心坐标的二元组(x,y)
- radius:浮点数类型,表示计算得到的最小覆盖圆的半径。
cv2.circle(img, center, radius, color, thickness)
- img:输入图像,通常是一个numpy数组,表示要绘制圆形的图像。
- center:一个二元组(x,y),表示圆心的坐标位置。
- radius:整数或浮点型数值,表示圆的半径长度。
- color:颜色标识,可以是BGR格式的三元组
OpenCV代码实现
import cv2 as cv
import numpy as np#读图 + 灰度化
num = cv.imread("../../images/num.png")
gray = cv.cvtColor(num, cv.COLOR_BGR2GRAY)#二值化
_,binary = cv.threshold(gray,0,255,cv.THRESH_OTSU + cv.THRESH_BINARY_INV)#查找坐标
counts,hie = cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)#遍历轮廓
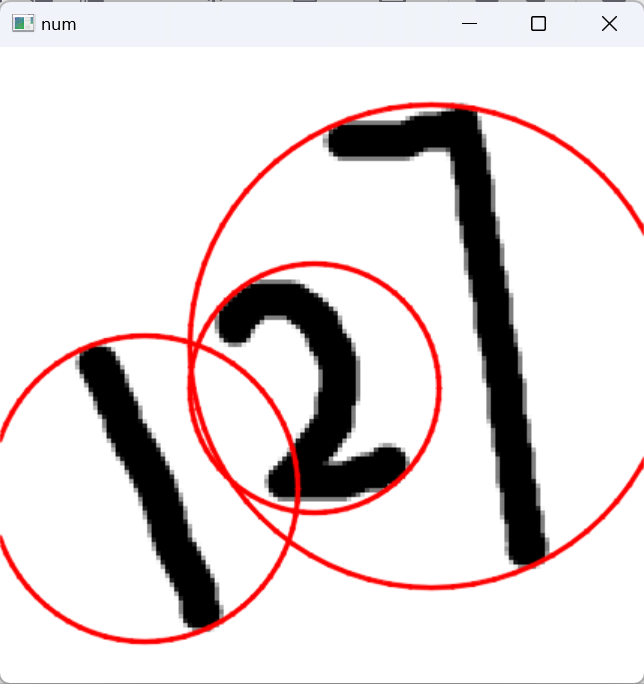
for c in counts:#查找最小外接圆(x,y),r = cv.minEnclosingCircle(c)print(x,y,r)#数据类型转换x,y,r = np.int_(x),np.int_(y),np.int_(r)#绘制最小外接圆cv.circle(num,(x,y),r,(0,0,255),2,cv.LINE_AA)#显示效果
cv.imshow("num",num)
cv.waitKey(0)
cv.destroyAllWindows()
最终结果显示
二、直方图均衡化
1、什么是直方图
直方图是对数据进行统计的一种方法,并且将统计值组织到一系列实现定义好的 bin 当中。其中, bin 为直方图中经常用到的一个概念,可以译为 “直条” 或 “组距”,其数值是从数据中计算出的特征统计量,这些数据可以是诸如梯度、方向、色彩或任何其他特征。
基础概念:
直方图是图像像素强度的统计分布图,X轴表示像素值(0-255),Y轴表示该像素值出现的频率。
核心作用:
- 分析图像对比度、亮度分布
- 检测过曝/欠曝
- 图像分割的前处理
- 颜色分布分析(彩色图像)
- 增加对比度:黑的更黑,白的更白。
2、绘制直方图
就是以像素值为横坐标,像素值的个数为纵坐标绘制一个统计图。
API及说明:
hist=cv2.calcHist(images, channels, mask, histSize, ranges)
- images:输入图像列表,可以是一幅或多幅图像(通常是灰度图像或者彩色图像的各个通道)。
- channels:一个包含整数的列表,指在每个图像上计算直方图的通道编号。如果输入的图像是灰度图,它的值就是[0];如果是彩色图像的话,传入的参数可以是[0],[1],[2]它们分别对应着通道B,G,R
- mask(可选):一个与输入图像尺寸相同的二值掩膜图像,其中非零元素标记了参与直方图计算的区域,None代表全部计算。
- histSize:一个整数列表,它是一个二维列表,每一维对应着一个通道的最小值和最大值,如灰度图就是[0,256]
返回值hist 是一个长度为255的数组,数组中的每个值表示图像中对应灰度等级的像素计数
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(hist)
获取直方图的最小值、最大值及其对应最小值的位置索引、最大值的位置索引
cv2.line(img, pt1, pt2, color, thickness)
- img:原始图像,即要在上面画线的numpy数组(一般为uint8类型)。
- pt1 和 pt2:分别为线段的起点和终点坐标,它们都是元组类型,例如 (x1, y1) 和 (x2, y2) 分别代表线段两端的横纵坐标。
- color:线段的颜色,通常是一个包含三个元素的元组 (B, G, R) 表示BGR色彩空间的像素值,也可以是灰度图像的一个整数值。
- thickness:线段的宽度,默认值是1,如果设置为负数,则线宽会被填充。
OpenCV代码实现
import cv2 as cv
import numpy as np#读图
cat = cv.imread("../../images/face.png")#统计像素
hist = cv.calcHist([cat],[0],None,histSize=[256],ranges=[0,256])
print(hist,len(hist))#获取直方图的最小值、最大值及其对应最 小值的位置索引、最大值的位置索引
minval, maxval , minloc, maxloc = cv.minMaxLoc(hist)
print(minval, maxval, minloc, maxloc)# 定义绘制图像的高
h_max = np.int_(400)#定义绘制的背景,黑色背景
back = np.zeros((400,256,3), np.uint8)#遍历
for i in range(256):#将统计频数转换为可视化的像素高度h = int(hist[i].item()*h_max/maxval)#绘制直方图cv.line(back,(i,400-h),(i,400),(0,255,0),1)cv.imshow("back",back)
cv.waitKey(0)
cv.destroyAllWindows()
3、直方图均衡化
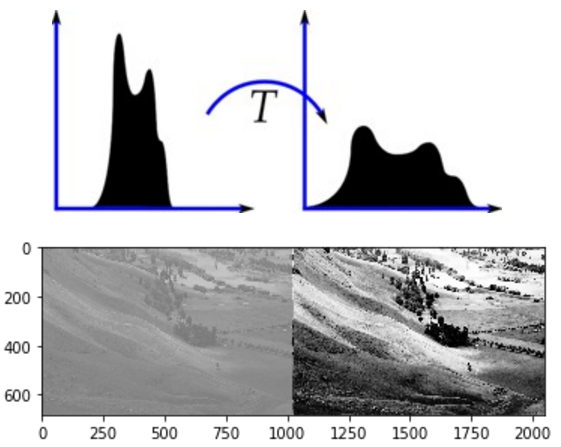
一副效果好的图像通常在直方图上的分布比较均匀,直方图均衡化就是用来改善图像的全局亮度和对比度。
如果一幅图像整体很亮,那所有的像素值的取值个数应该都会很高,所以应该把它的直方图做一个横向拉伸,就可以扩大图像像素值的分布范围,提高图像的对比度
通俗的讲,就是遍历图像的像素统计出灰度值的个数、比例与累计比例,并重新映射到0-255范围(也可以是其他范围)内,其实从观感上就可以发现,下面两幅图中前面那幅图对比度不高,偏灰白。
- 直方图均衡化作用:
- 增强对比度
- 提高图像质量
(1)自适应直方图均衡化
自适应直方图均衡化(Adaptive Histogram Equalization, AHE),通过调整图像像素值的分布,使得图像的对比度和亮度得到改善。
API及说明:
dst = cv.equalizeHist(imgGray)
imgGray为需要直方图均质化的灰度图,返回值为处理后的图像
OpenCV代码实现:
import cv2 as cv#读图,灰度化
img = cv.imread("../../images/zhifang.png", cv.IMREAD_GRAYSCALE)
print(img.shape)
dst = cv.equalizeHist(img)cv.imshow("img", img)
cv.imshow("dst", dst)
cv.waitKey(0)
cv.destroyAllWindows()
结果显示

该方法适用于图像的灰度分布不均匀,且灰度分布集中在更窄的范围,图像的细节不够清晰且对比度较低的情况。
(2)对比度受限的自适应直方图均衡化
核心原理
与传统直方图均衡化的区别
| 特性 | 传统均衡化 | CLAHE |
|---|---|---|
| 处理范围 | 全局图像 | 局部区域(分块处理) |
| 对比度控制 | 无限制 | 通过阈值限制对比度增强幅度 |
| 噪声抑制 | 可能放大噪声 | 有效抑制噪声 |
| 适用场景 | 整体低对比度图像 | 局部光照不均的图像(如医学影像) |
API及说明:
clahe = cv2.createCLAHE(clipLimit=None, tileGridSize=None)
- clipLimit(可选):对比度限制参数,用于控制直方图均衡化过程中对比度增强的程度。如果设置一个大于1的值(如2.0或4.0),CLAHE会限制对比度增强的最大程度,避免过度放大噪声。如果不设置,OpenCV会使用一个默认值。
- tileGridSize(可选):图像分块的大小,通常是一个包含两个整数的元组,如(8, 8),表示将图像划分成8x8的小块进行独立的直方图均衡化处理。分块大小的选择会影响到CLAHE的效果以及处理速度。
创建CLAHE对象后,使用 .apply() 方法对图像进行CLAHE处理:
img=clahe.apply(image)
- image:要均衡化的图像。
- img均衡后的图像
OpenCV代码实现
import cv2 as cv#读图,灰度化
img = cv.imread("../../images/songyuqi.jpg")
img = cv.resize(img, dsize=(405, 721))
img1 = cv.cvtColor(img, cv.COLOR_BGR2GRAY)#创建clahe对象
clahe = cv.createCLAHE(clipLimit=2, tileGridSize=(8,8))#调用apply()方法
dst = clahe.apply(img1)#显示效果
cv.imshow("img", img)
cv.imshow("img1", img1)
cv.imshow("dst", dst)
cv.waitKey(0)
cv.destroyAllWindows()
结果显示

三、模板匹配
模板匹配就是用模板图(通常是一个小图)在目标图像(通常是一个比模板图大的图片)中不断的滑动比较,通过某种比较方法来判断是否匹配成功,找到模板图所在的位置。
- 不会有边缘填充。
- 类似于卷积,滑动比较,挨个比较象素。
- 返回结果大小是:目标图大小-模板图大小-1。
基本原理:
-
在目标图像中滑动搜索模板图像,计算相似度
-
返回匹配位置坐标和置信度分数
关键特性:
| 特性 | 说明 |
|---|---|
| 平移不变性 | 只能检测平移变换,无法处理旋转/缩放 |
| 计算效率 | 复杂度高(大图像+大模板时慢),适合小范围搜索 |
| 应用场景 | 物体定位、工业质检、简单OCR |
API及说明:
res=cv2.matchTemplate(image, templ, method)
- image:原图像,这是一个灰度图像或彩色图像(在这种情况下,匹配将在每个通道上独立进行)。
- templ:模板图像,也是灰度图像或与原图像相同通道数的彩色图像。
- method:匹配方法,可以是以下之一:
- cv2.TM_CCOEFF:需要先计算模板与目标图像的均值,然后通过每个像素与均值之间的差的乘积再求和来表示其匹配程度,1表示完美的匹配,-1表示最差的匹配。
- cv2.TM_CCOEFF_NORMED:也是将相关系数匹配的结果统一到0到1之间,值越接近1代表匹配程度越高。
- cv2.TM_CCORR:使用对应像素的乘积进行匹配,乘积的结果越大其匹配程度越高。
- cv2.TM_CCORR_NORMED:与相关匹配类似,只不过是将其值统一到0到1之间,值越大,代表匹配程度越高。
- cv2.TM_SQDIFF:以模板图与目标图所对应的像素值使用平方差公式来计算,其结果越小,代表匹配程度越高。
- cv2.TM_SQDIFF_NORMED:与平方差匹配类似,只不过需要将值统一到0到1,计算结果越小,代表匹配程度越高。
这些方法决定了如何度量模板图像与原图像子窗口之间的相似度。
返回值res
函数在完成图像模板匹配后返回一个结果矩阵,这个矩阵的大小与原图像相同。矩阵的每个元素表示原图像中相应位置与模板图像匹配的相似度。
匹配方法不同,返回矩阵的值的含义也会有所区别。以下是几种常用的匹配方法及其返回值含义:
- cv2.TM_SQDIFF 或 cv2.TM_SQDIFF_NORMED:
返回值越接近0,表示匹配程度越好。最小值对应的最佳匹配位置。 - cv2.TM_CCORR 或 cv2.TM_CCORR_NORMED:
返回值越大,表示匹配程度越好。最大值对应的最佳匹配位置。 - cv2.TM_CCOEFF 或 cv2.TM_CCOEFF_NORMED:
返回值越大,表示匹配程度越好。最大值对应的最佳匹配位置。
绘制轮廓:
找的目标图像中匹配程度最高的点,我们可以设定一个匹配阈值来筛选出多个匹配程度高的区域。
loc=np.where(array > 0.8) #loc包含array中所有大于0.8的元素索引的数组
np.where(condition) 是 NumPy 的一个函数,当条件为真时,返回满足条件的元素的索引。
zip(*loc)
- *loc 是解包操作,将 loc 中的多个数组拆开,作为单独的参数传递给 zip。
- zip 将这些数组按元素一一配对,生成一个迭代器,每个元素是一个元组,表示一个坐标点。
OpenCV代码实现
import cv2 as cv
import numpy as np
#读图
game = cv.imread("../../images/game.png")
temp = cv.imread("../../images/temp.png")#转灰度
gray_game = cv.cvtColor(game, cv.COLOR_BGR2GRAY)
gray_temp = cv.cvtColor(temp, cv.COLOR_BGR2GRAY)
# print(gray_game.shape, gray_temp.shape)#获取模板图的宽高
h,w = gray_temp.shape#模板匹配 结果矩阵大小 = 目标 - 模板 + 1
ret = cv.matchTemplate(gray_game, gray_temp, cv.TM_CCOEFF_NORMED)
print(ret,ret.shape)#设定匹配阈值
threshold = 0.8
#获取结果矩阵中,匹配上的结果的位置索引
loc = np.where(ret > threshold)
# print(loc)#解包操作
iter = zip(*loc)for pt in iter:print(pt)right_bottom = (pt[1] + w , pt[0] + h)left_top = pt[::-1]cv.rectangle(game, left_top, right_bottom, (0, 255, 0), 1)#显示效果
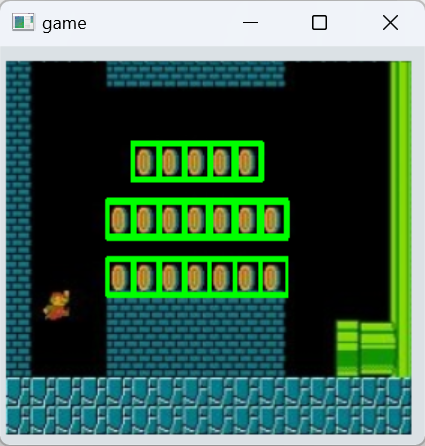
cv.imshow("game", game)
cv.waitKey(0)
cv.destroyAllWindows()
结果显示