GNSS差分定位系统之二:差分定位能直接提高移动站的定位精度吗?
在上一篇文章 《GNSS差分定位系统之一:差分定位中的单差和双差》 中,我们介绍了 GNSS 差分定位的单差方程和双差方程。
今天我们来探讨一个核心问题:差分定位能够直接提高移动站的定位精度吗?
先说结论:
差分定位求解的未知数是基准站和移动站之间的坐标差 (Δx, Δy, Δz),而不是移动站的绝对坐标本身。
因此,差分的结果是高精度的坐标差,而非移动站 (x, yₙ, zₙ) 的高精度绝对位置,移动站的定位精度受限于基准站的定位精度。
考虑残差的单差与双差方程
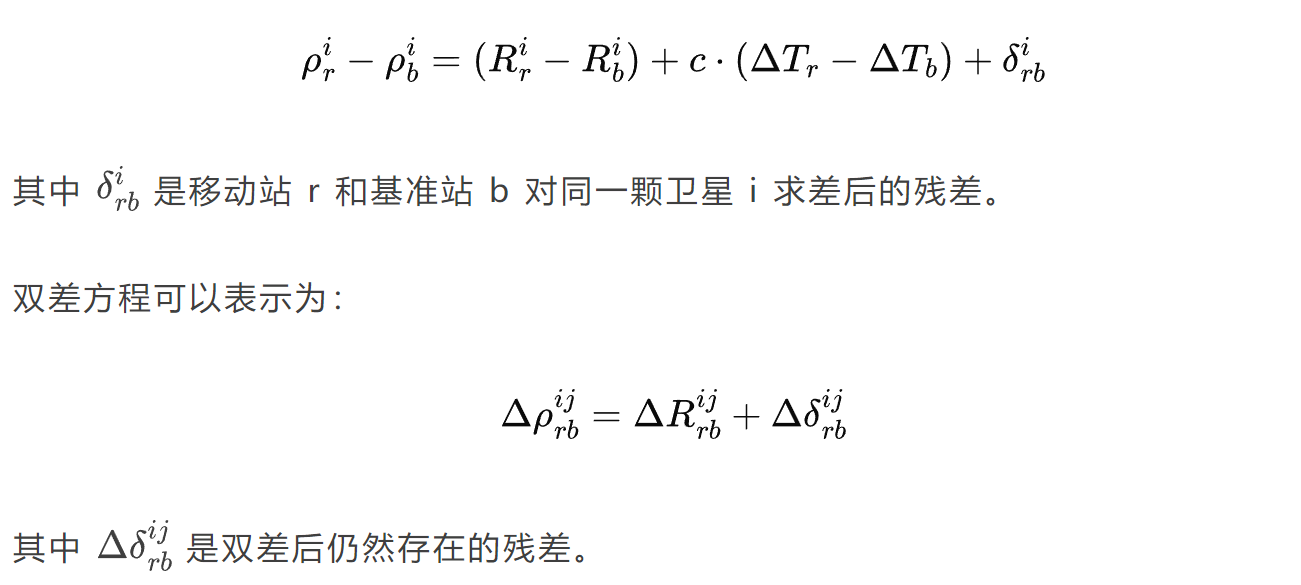
考虑到差分计算中残余误差的影响(主要包括接收机噪声、多路径效应、电离层延迟的残差、对流层延迟的残差、星历误差的残差等),我们可以写出更精确的差分方程。
单差方程可表示为:

基线向量
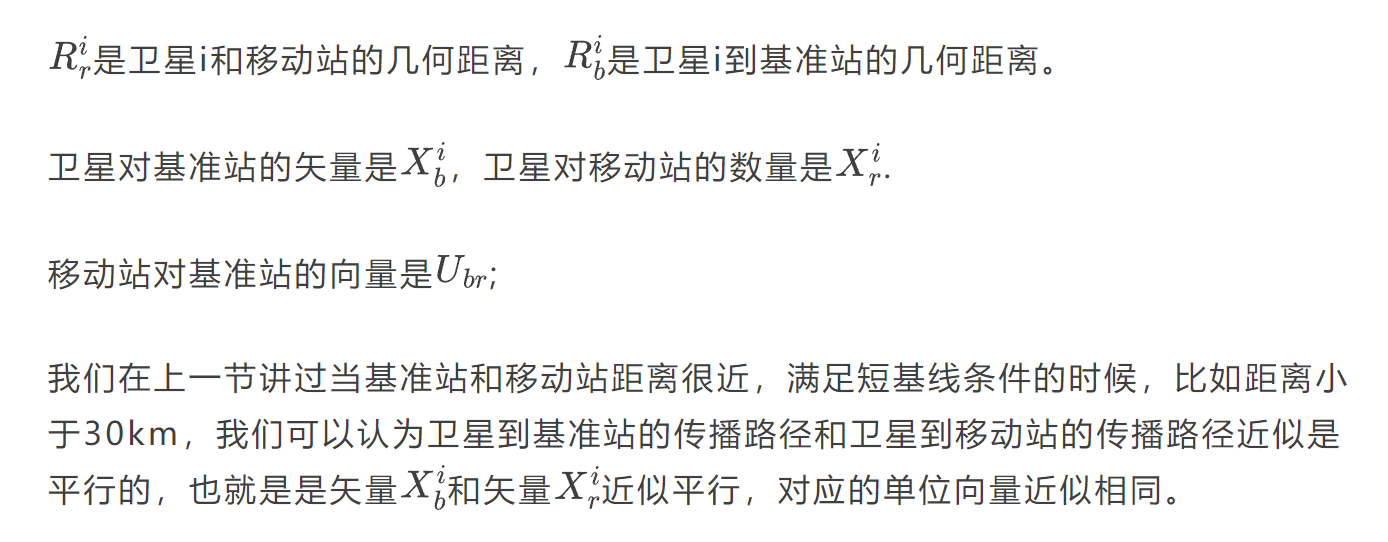
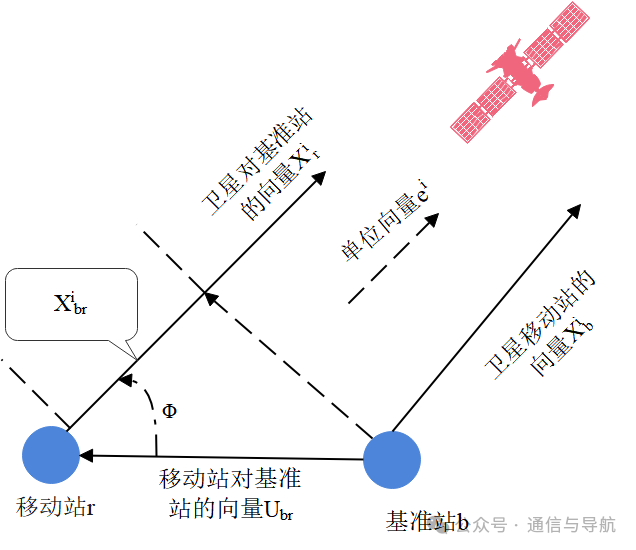
向量计算
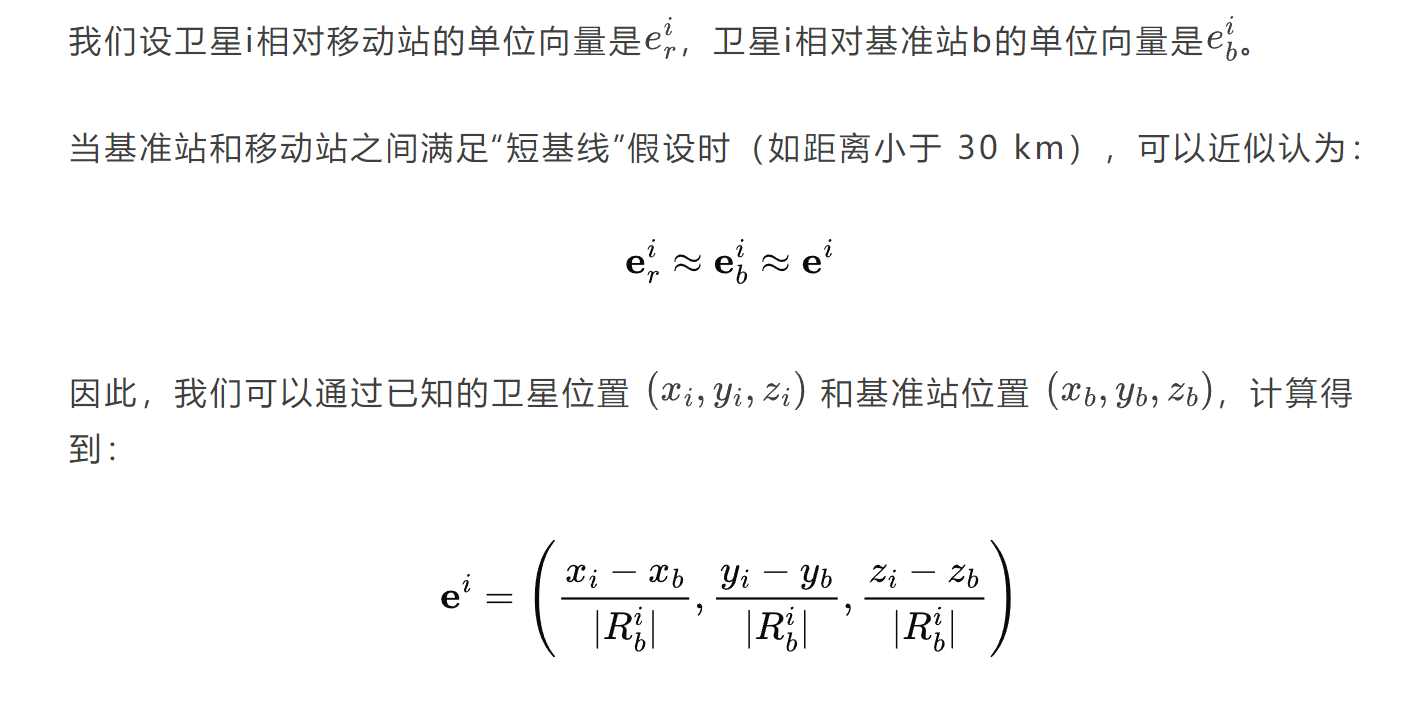
这个向量也是卫星i 相对移动站 r 的单位向量。
基准站指向移动站的向量,,也被称为差分定位的基线向量。

双差方程则如下所示:

差分定位的未知数是什么?
移动站定位怎么获取
我们在在基准站运动条件下,差分定位能有高精度吗?也给出了同样的结论。在基准站是运动的条件下,由于基准站的位置是通过单机定位得到的,差分定位并不能提高移动站的绝对位置精度。
实际应用分析
因此,只有当基准站的绝对位置已知且精度较高时,差分定位技术才能获得移动站的高精度定位结果。
在一些特殊应用场景中,并不需要移动站的绝对坐标,而是关注基准站和移动站之间的相对位置变化,例如:
-
• 飞机/无人机的舰载着陆引导:
-
• 基准站安装在船上,移动站安装在飞机上;
-
• 通过差分计算得到飞机与船舶之间的相对位置变化,用于安全着陆。
-
-
• 山区地质滑坡监测:
-
• 移动站安装于斜坡,基准站安装于稳定基岩上;
-
• 通过 Δx、Δy、Δz 的变化来检测地面位移,判断是否发生滑坡。
-
在这些场景中,Δx、Δy、Δz 作为高精度的差分结果,是核心关注对象。
总结:差分定位的本质
差分定位真正提高的是基准站和移动站之间的坐标差 (Δx, Δy, Δz) 的精度,而不是移动站的绝对坐标的精度。
移动站的绝对精度仍受到基准站定位质量的制约。如果基准站采用单点定位(定位精度在米级),则即使 Δx、Δy、Δz 达到厘米级,移动站的精度也只在米级范围内。
因此,为实现高精度的移动站定位,建议采用高精度的已知基准站。
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。
原文链接:GNSS差分定位系统之二:差分定位能直接提高移动站的定位精度吗?