FCW(Front Collision Warning)前碰撞预警功能介绍
FCW(Front Collision Warning)前碰撞预警功能介绍
FCW功能
- 通过雷达监测前方车辆,判断自车与前车之间的距离、方位、相对速度,当系统判断存在潜在碰撞风险时,向驾驶员发出警告的功能。与AEB不同,FCW并不直接控制车辆。
- 一般和AEB结合使用。
传感器
- 前视摄像头 / 前向长距离毫米波雷达 / 多传感器融合
- 要求:识别出前方目标的存在,与自车的距离、相对速度、角度等。
接口定义
输入/输出

控制系统算法
模式控制模块
- 主要实现FCW功能的使能控制和驾驶员主动干预功能。
信息处理模块
- 对环境感知信息和本车信息进行实时处理,并进行车辆危险程度评估。
- FCW系统危险程度评估算法
- 三段式距离判定方法
- 1.预警距离:驾驶员反应时间内距离
- 2.制动距离:利用运动学公式,表征系统加速作用距离
- 3.预制安全距离:制动结束后,本车与前车预留的安全距离,可通过本车速度或相对速度查表
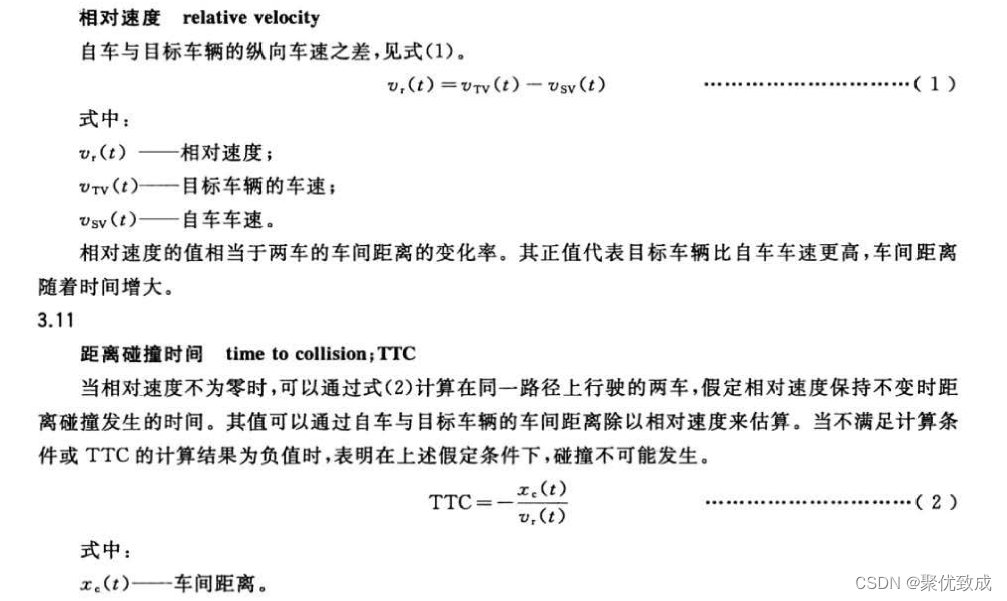
- TTC碰撞事件判别方法
- 三段式距离判定方法
状态控制逻辑模块
- 根据两车状态信息和危险程度评估的数据,进行实时FCW状态控制。
- 状态行为定义
- OFF:功能关闭
- Active:功能开启状态
- Standby:功能开启准备
- Warning1:一级预警
- Warning2:二级预警
- 参数
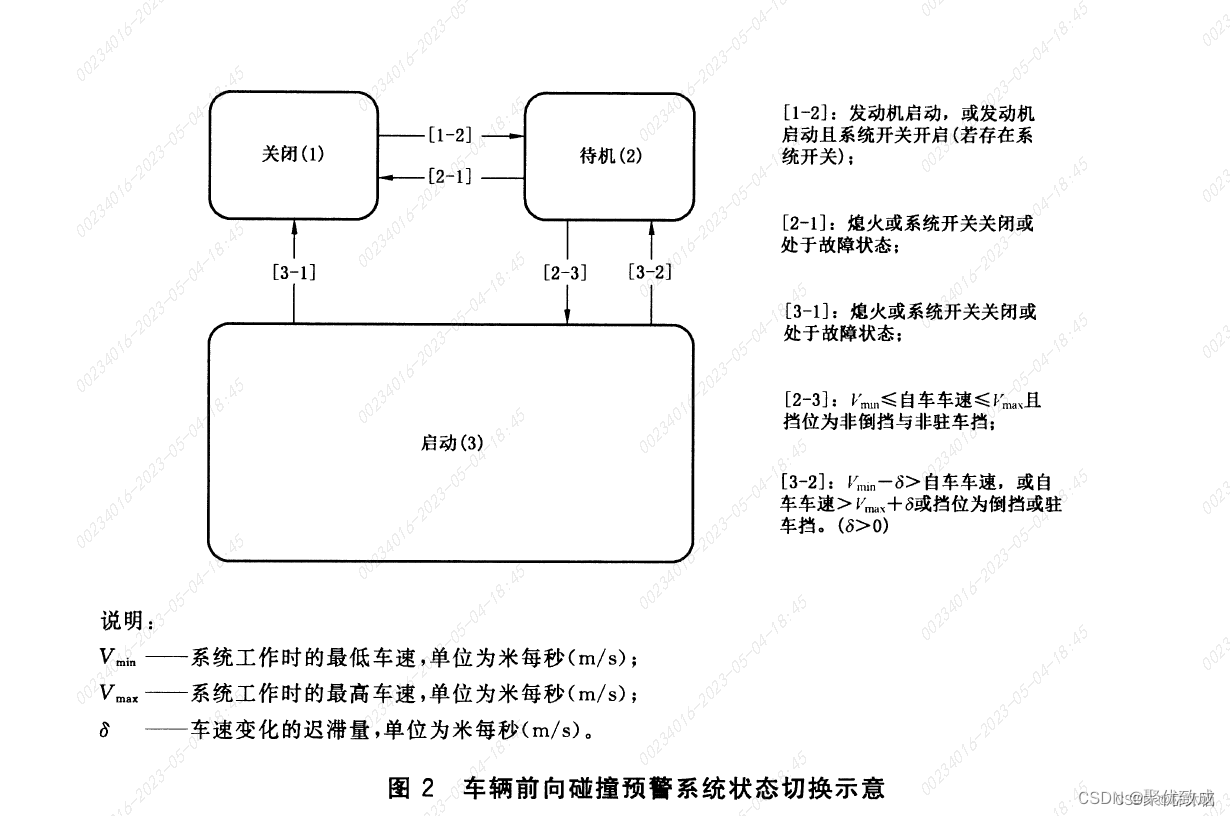
- 控制逻辑状态图
HMI人机交互显示及预警
- 车距显示
- 车辆图标
- 车辆告警音
参考链接
- https://blog.51cto.com/u_15127555/2710194
- https://zhuanlan.zhihu.com/p/365866167
- https://blog.csdn.net/weixin_45035094/article/details/131162497
- https://blog.csdn.net/qq_41593516/article/details/124497147