电力电子simulink练习08:闭环控制的引入与PI调节器
- 以前面搭建的DCDC变换器为例:Buck变换器;
- 实现闭环反馈控制;
- PI调节器的使用;
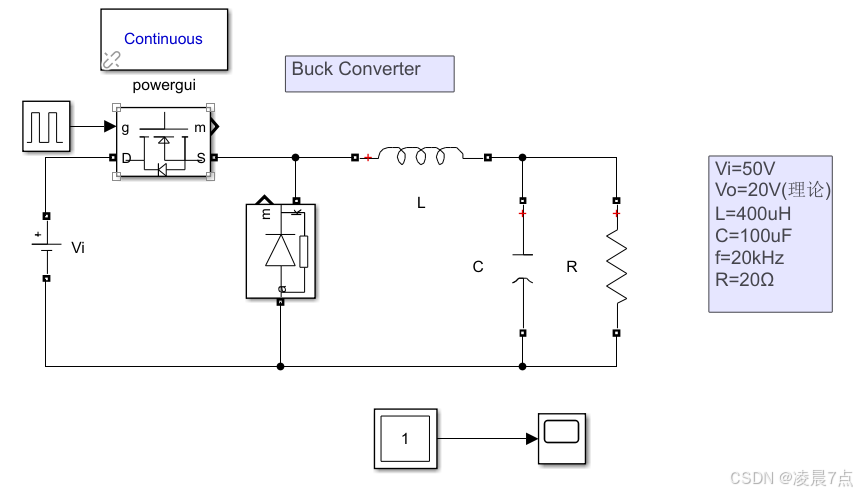
1、电路的搭建
- 按前面文章所搭建的过程,搭建Buck电路;
- 问题回顾:输出电压Vo只在20V附近,不是准确的20V,如何解决?
2、解决思路
- 可否增大一点占空比,补偿这一点差距呢?
- 答:效果不佳!因为电流变化或以后Vo需求变化,每次的占空比都不一样都需要重新查表设置。
- 解决办法:使用闭环控制!!!即可。
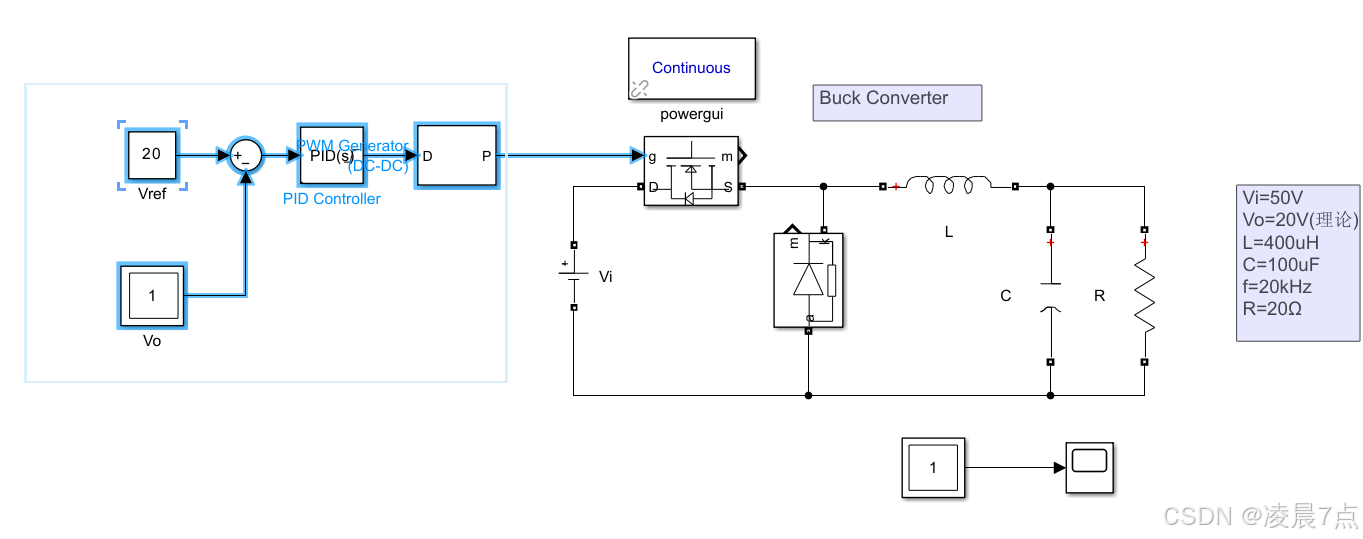
3、闭环过程
- 控制过程:将给定与反馈进行比较,得到误差,对误差信号进行调节,调节后作用到被控对象上,被控对象输出再反馈到前面形成闭环。
- 当前模型:
-(1)给定信号:就是理论要输出的电压值Vref=20V;
-(2)反馈:就是真实输出电压Vo;
-(3)误差:就是给定与反馈作差Vref-Vo;
-(4)控制:就是PI调节器模块:PID Controller;
-(5)调节结果:就是给MOS管的占空比;
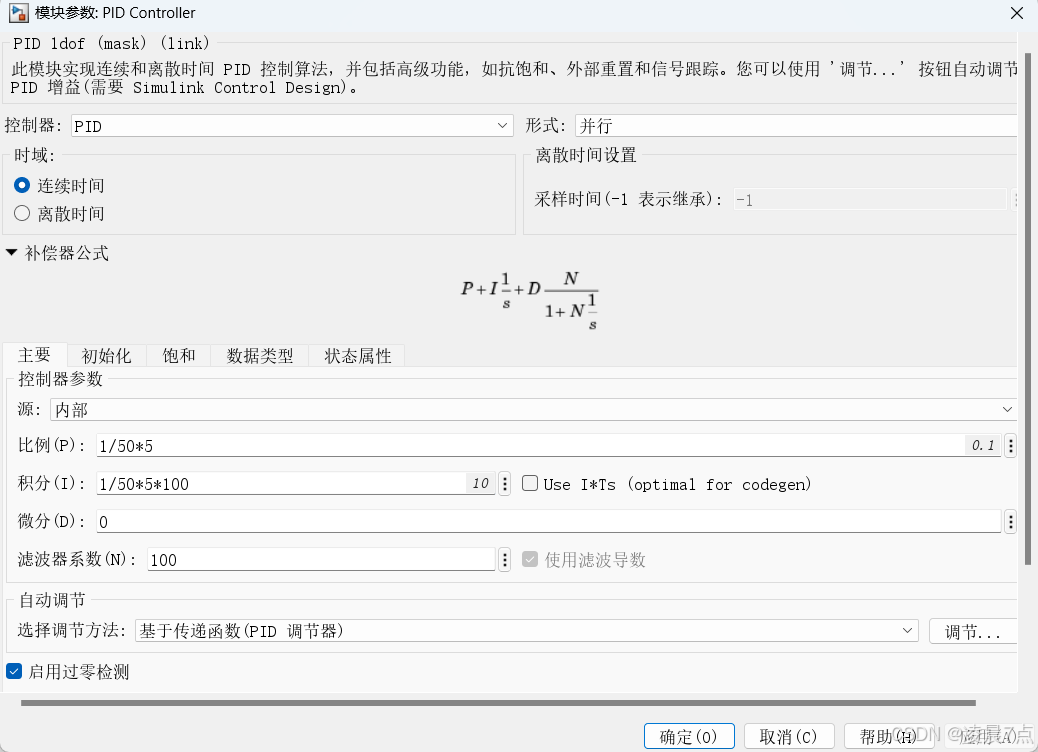
4、PI控制器的说明
- 双击打开PID控制器,通常只需要设置P和I即可;
- 从低频段:Kp比例项,控制系统里面的前向通道增益,Kp越大通常稳态误差就越小,因为前向通道的增益大了在Bode图看就是低频段,低频段高了就是稳态静差减小,这是Kp作用,
- 从中频段:快速性也跟Kp有关,因为Kp可以把整个Bode图的频率响应曲线抬升,就会使得和横坐标交叉点,就是说在中频段的截止频率或者说剪切频率,这个点往后移,使得截止频率增大;而闭环带宽是和截止频率成正比的,而闭环带宽就是闭环的截止频率,它越大,就表明系统快速性越好,所以Kp增大也可以增强快速性;这是从中频段的角度来看的;
- 从高频段:高频段角度看,就是噪声抑制能力,这部分在微分项才能体现;
- 积分项的作用:就是消除稳态误差,主要是提高系统型别来消除稳态误差;
5、PI的参数设置
- 以本Buck电路为例,说明参数设置思路。
- 这里给定Vref=20V,如果反馈回来只有Vo=19V,那么就我误差了Vref-Vo=1V,而误差的这个1V就是需要占空比来补上;那么需要多少占空比来补呢?占空比补1/50,通常需要快速调节,所以这个Kp就可以设置1/50*5即可;
- Ki就是消除稳态误差的,因为积分是1/s,是1秒钟的时间调节这么多,但是因为仿真时间很快的,如果直接还是设置1/50*5,那还没到1秒模型早就仿真完了;因为这里是0.01秒仿真完,所以这个Ki就可以设置1/50 * 5 * 100即可;
- 微分项,可以暂时不调;
- 饱和限幅设置:因为输出的是占空比,所以限幅就是占空比的范围,可以设置0-0.98即可;
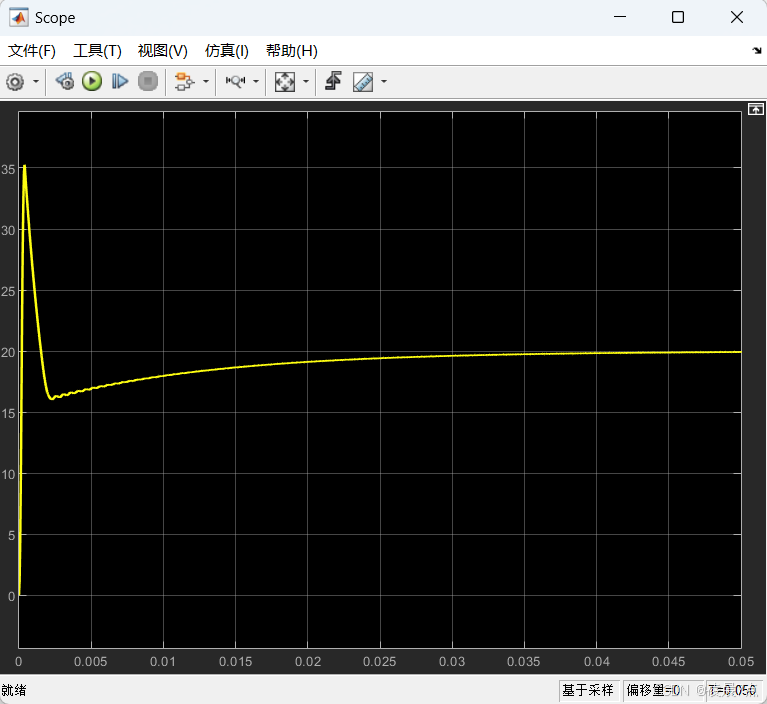
6、运行结果
- 此时看输出的Vo,可以看到在最后,慢慢就能无静差到Vo=20V了;
Kp=1/50*5;Ki=1/50*5*100;
- 再适当调一下Kp和Ki;此时也是能基本到无静差了;
Kp=1/50*10;Ki=1/50*10*100;
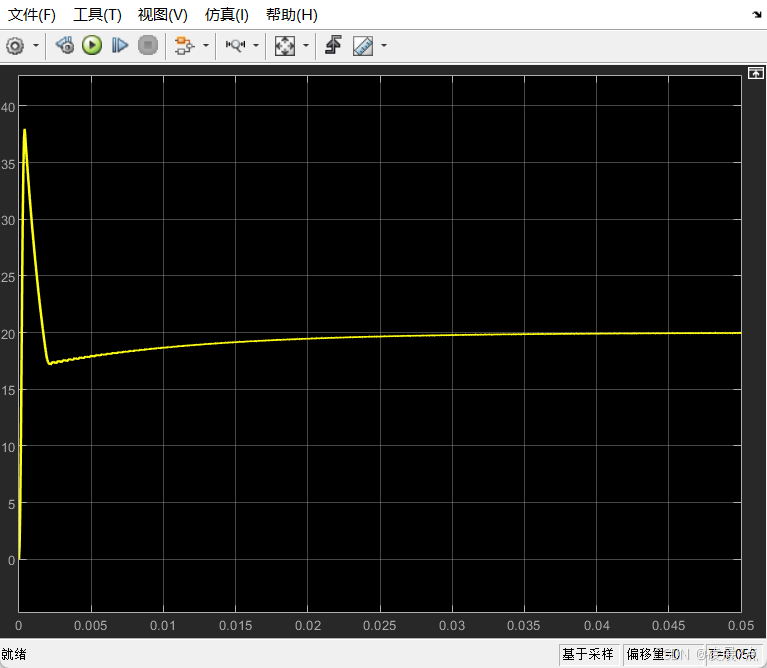
7、存在问题
- 可以看到Vo的波形,调节过程会有一点缓慢,一开始就冲到很高,然后下降之后,又由积分项慢慢抬到无静差。
- 整个过程到0.03s左右才感觉好一点;
- 解决:可以通过复合控制的方式。
- 也就是通过开环控制和闭环控制相结合,共同组成最后输出的占空比来解决这个问题,这部分会后续整理。
学习来源:B站:西瓜粥西瓜粥