KCF 算法在ROS 2 操作系统里面(详解)
引言:这是本人第一次接触图像处理的算法,如有错误,请批评指正
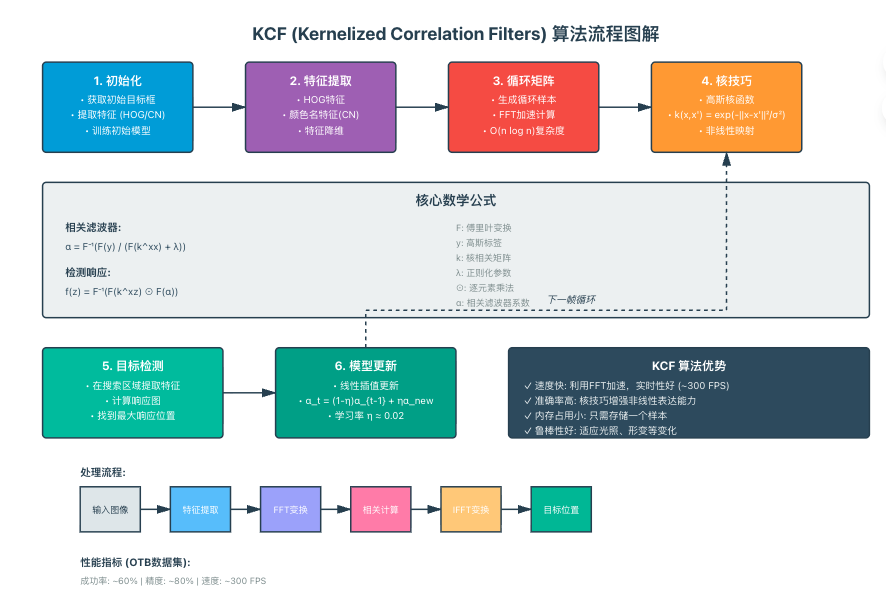
1.什么是KCF 算法?
KCF是一种高效的目标跟踪算法,下面是
2.怎么实现KCF 算法,使用代码实现本文提供 Python 代码实现
1.初始化
1.获取初始目标框(使用汉宁窗函数)
1.为什么使用汉宁窗?
1.使用汉宁窗主要是为了解决循环移位带来的边界效应问题,这是基于相关滤波的跟踪器的核心挑战。
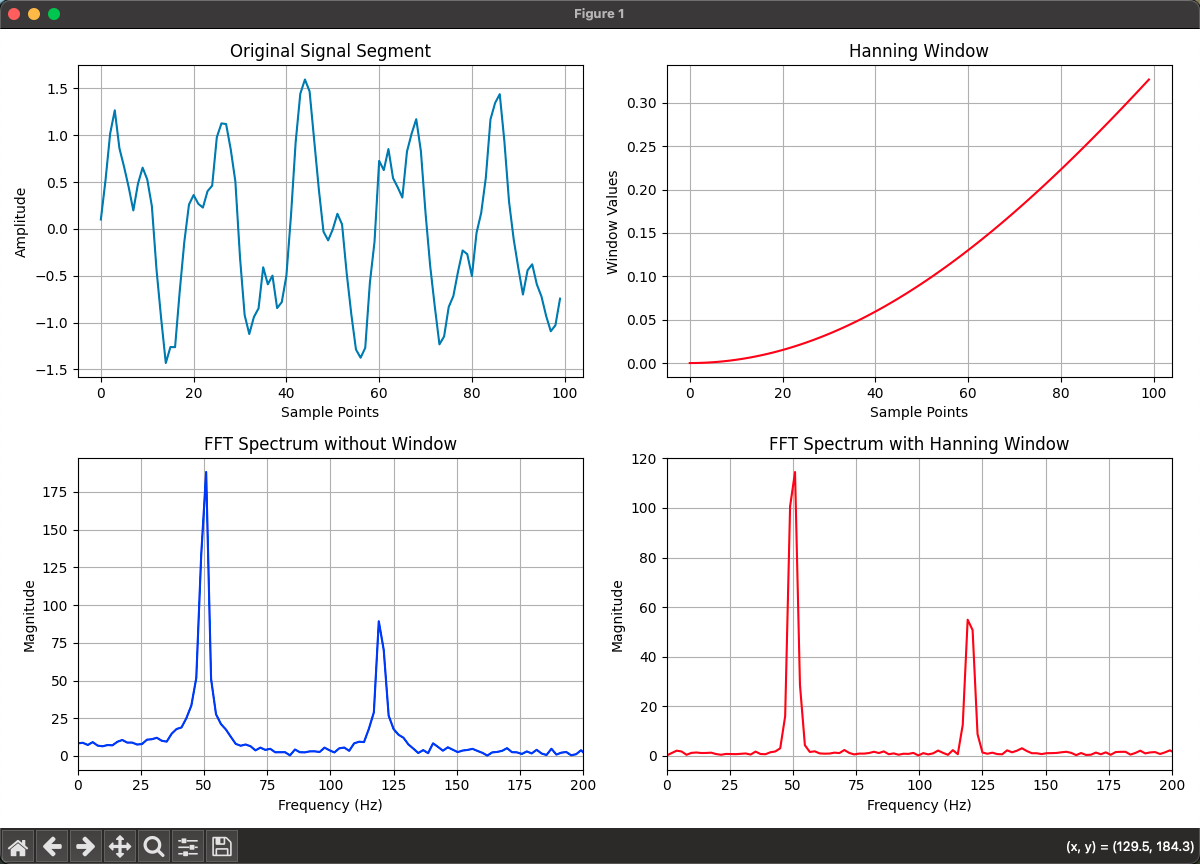
2.下面是模拟(使用 scipy 库)有窗和无窗的对比图
可以看出样本点(Sample Points)如果越多的话,那么我们这个窗口值(Windows Value) 的值是一个类似于二次函数的关系,但是对于无窗处理的话,那么样本点数和幅值(Ampltitude)没有太大的关联性
2.初始化流程(在ROS2环境下的节点)
我们首先需要订阅/camera/image_raw这个是相机节点发布的subscriber
我就给我们的KCF节点取名字叫kcf_node(易于在机器人节点中辨认)
kcf_node的 publisher 是我们的相机节点camera_node
3.工作流程
在ROS2的工作目录下创建一个名叫kcf_track的包(使用下面的命令新建一个包)
ros2 pkg create kcf_track --build-type ament_cmake --dependencies rclcpp geometry_msgs sensor_msgs std_msgs cv_bridge在包目录下新建launch 文件夹 launch文件的作用确定先打开camera 节点在打开 kfc 节点
我们shi'y
2.特征提取
3.循环矩阵
4.核技巧
5.目标检测
6.模型更新