计算机图形学·12 OpenGL Transformations
本文是记录专业课“计算机图形学”的部分笔记,参考教材为Angel的第八版交互式计算机图形学——基于WebGL 2.0的自顶向下方法。
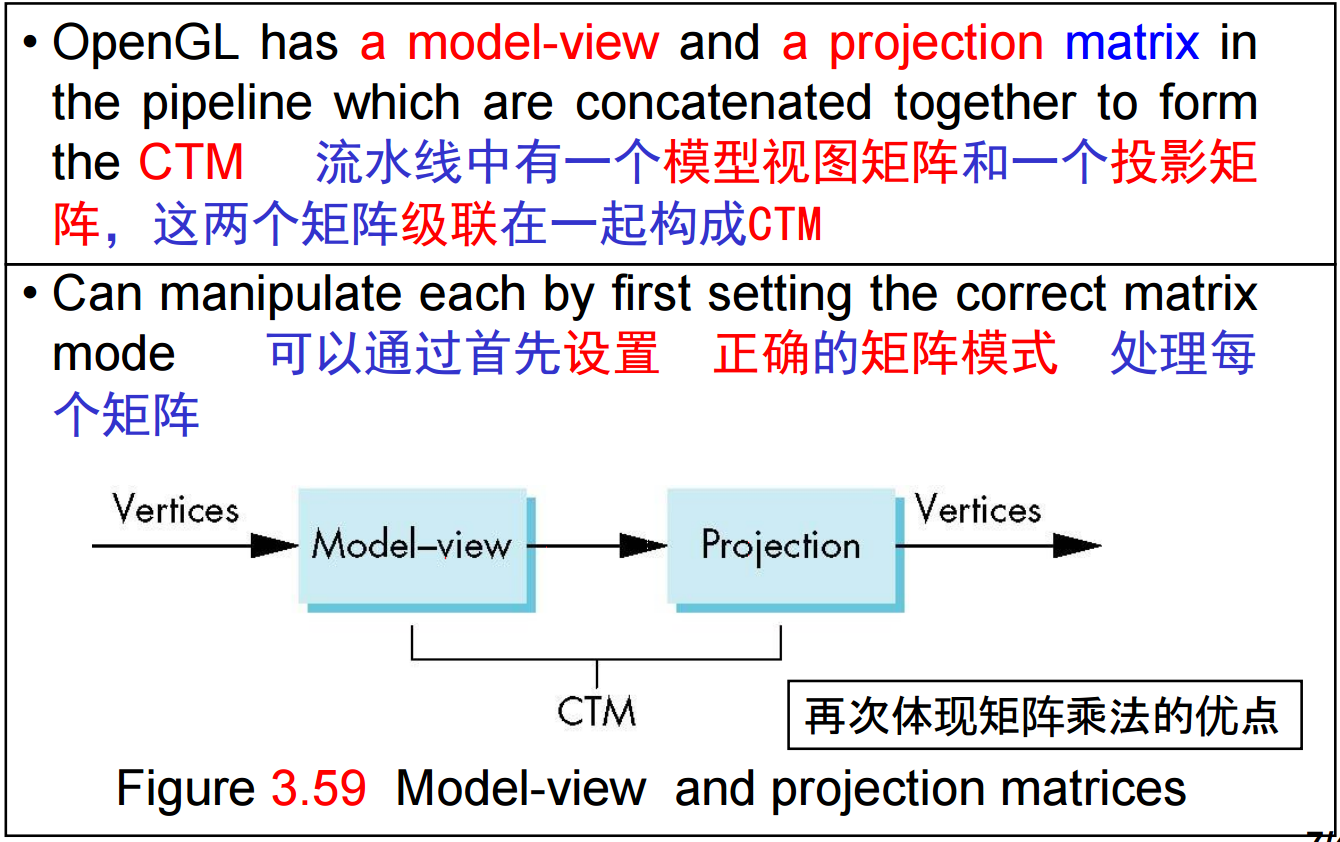
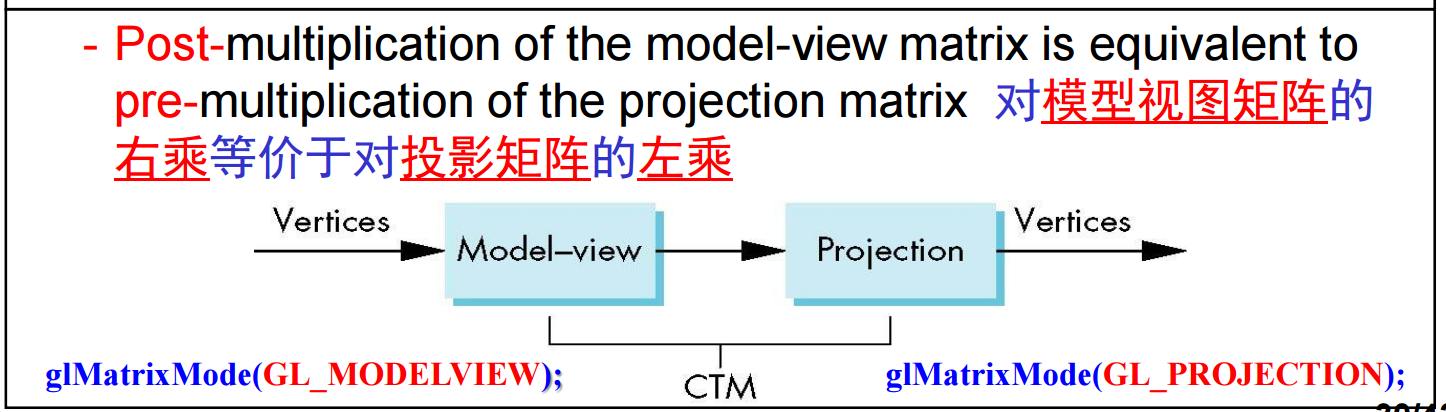
1、在OpenGL中,矩阵是状态的一部分,有以下几类:①GL_MODELVIEW 模型视图;②GL_PROJECTION 投影;③GL_TEXTURE 纹理;④GL_COLOR 颜色。而当前变换矩阵(CTM)就是一个4x4阶的齐次坐标矩阵,它作为状态的一部分,被应用到经过流水线中的所有顶点。CTM是在应用程序中定义的,并被加载到变换单元中。CTM可以被改变,改变的方法是上载一个新的CTM或者右乘一个矩阵:
Load an identity matrix: C <- I
Load an arbitrary(任意的) matrix: C <- M
Load a translation matrix: C <- T
Load a rotation matrix: C <- R
Load a scaling matrix: C <- S
Postmultiply by an arbitrary matrix: C <- CM
Postmultiply by a translation matrix: C <- CT
Postmultiply by a rotation matrix: C <- CR
Postmultiply by a scaling matrix: C <- CS
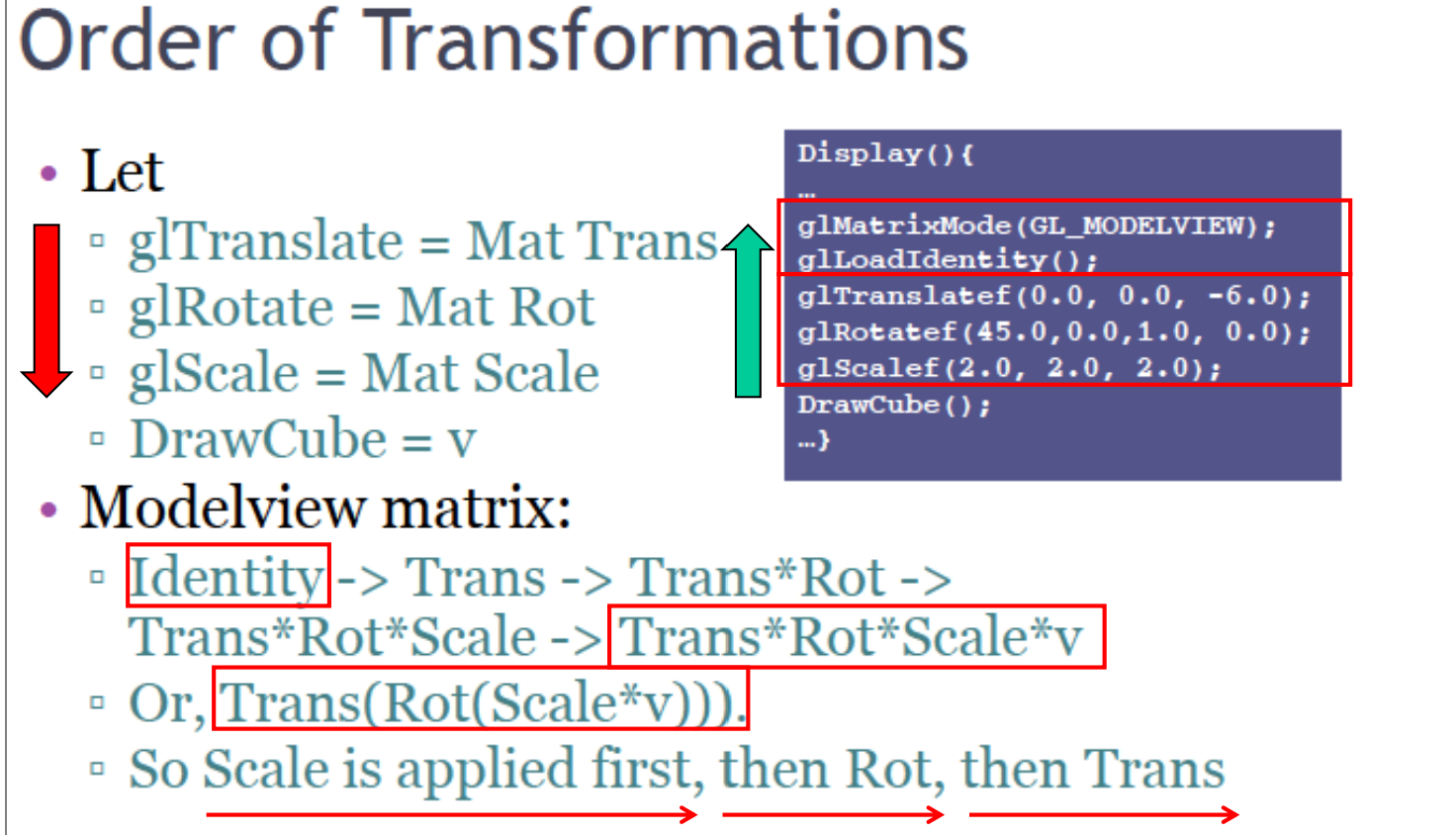
2、现在来看具体函数。glLoadIdentity()是加载单位阵,相当于重置矩阵。也可以右乘①glRotatef(theta, vx, vy, vz) 其中theta为角度,(vx, vy, vz)定义旋转轴,默认转向为逆时针;②glTranslatef(dx, dy, dz) 平移变换;③glScalef( sx, sy, sz) 比例变换,原点为不动点。每个函数可以是f还可以是d(double)类型。
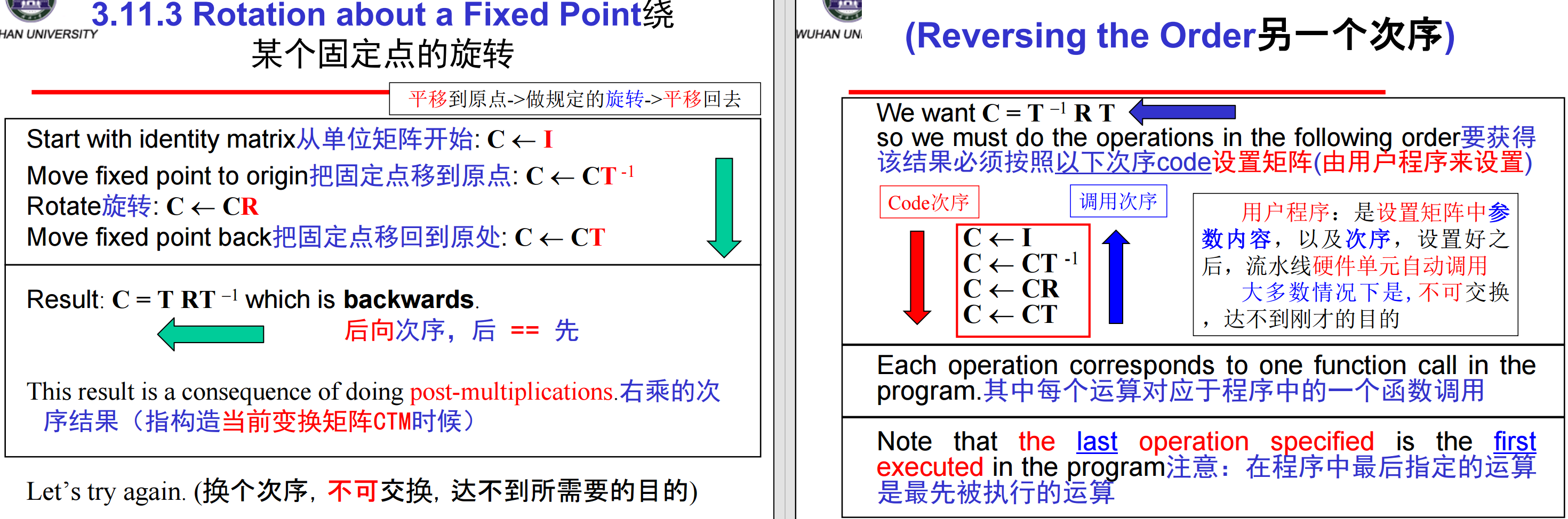
一个例子,固定点为(1.0, 2.0, 3.0),绕z轴旋转30°:
glMatrixMode(GL_MODELVIEW);glLoadIdentity();//从这开始,记住在程序中最后指定的矩阵是最先被执行的操作glTranslatef(1.0, 2.0, 3.0);glRotatef(30.0, 0.0, 0.0, 1.0);glTranslatef(-1.0, -2.0, -3.0);可以这么理解:
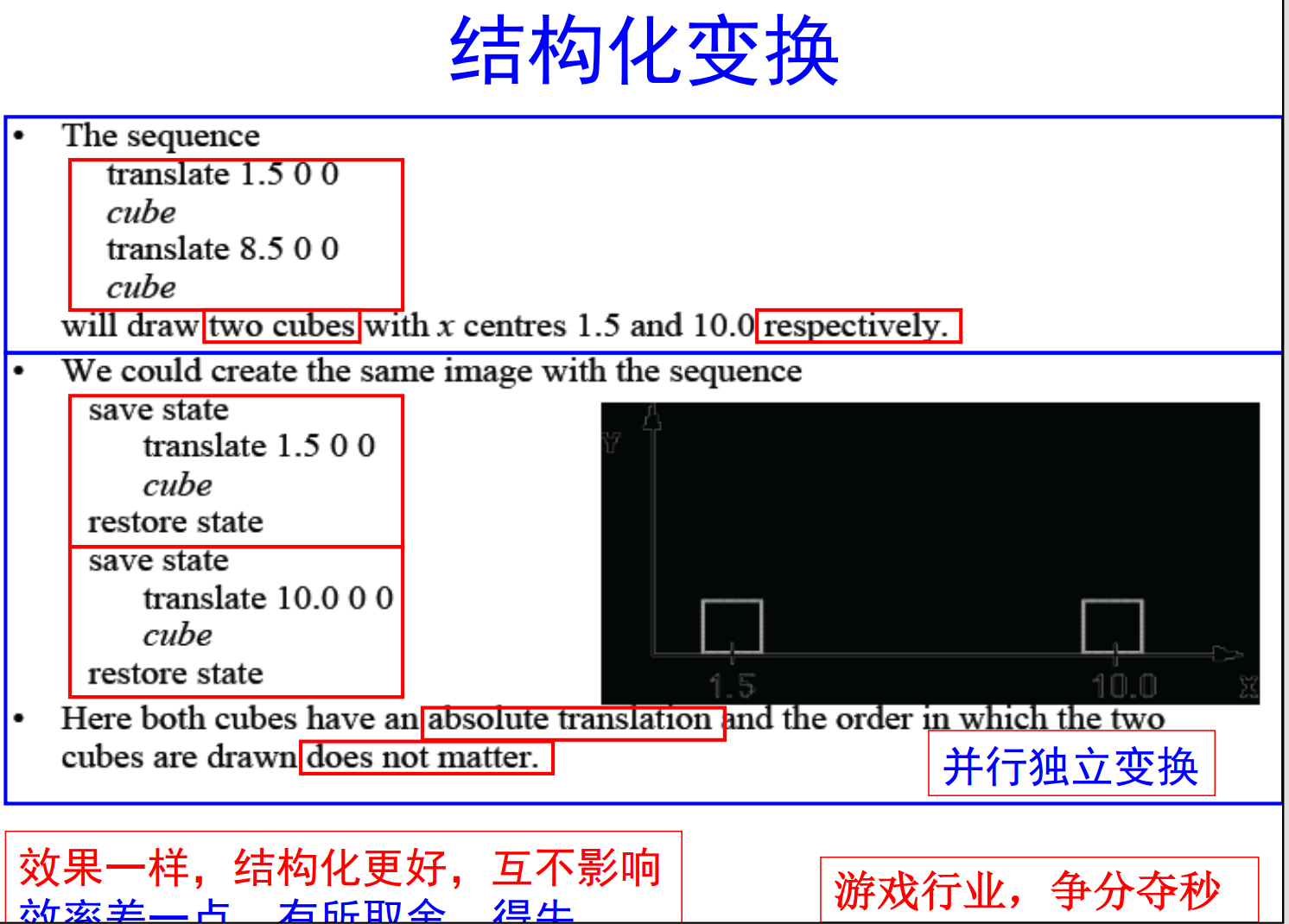
3、glLoadMatrixf(m) 可以上载应用程序中定义的矩阵、使之替换当前CTM;glMultMatrixf(m) 可以让m乘在已有矩阵的右边。而许多时候,需要保存变换矩阵,待稍后再用。这可以通过遍历层次数据结构、当执行显示列表时避免状态改变来实现,OpenGL则为每种类型的矩阵维持栈结构:
glPushMatrix() //压入,保存
glPopMatrix() //弹出,恢复
4、此外,状态中有些信息是以矩阵形式保存的,可以利用查询函数读入矩阵(以及其它部分的状态),比如glGetIntegerv、glGetFloatv、glGetBooleanv、glGetDoublev、glIsEnabled:```
double m[16];
glGetFloatv(GL_MODELVIEW, m);
5、变换的应用:旋转立方体(应用空闲函数旋转立方体,鼠标函数改变旋转的方向)。部分代码示例:
void main(int argc, char **argv)
{ glutInit(&argc, argv);glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB |GLUT_DEPTH);glutInitWindowSize(500, 500);glutCreateWindow("colorcube");glutReshapeFunc(myReshape);glutDisplayFunc(display);glutIdleFunc(spinCube);glutMouseFunc(mouse);glEnable(GL_DEPTH_TEST);glutMainLoop();
}void spinCube()
{
theta[axis] += 2.0;
if( theta[axis] > 360.0 ) theta[axis] -= 360.0;
glutPostRedisplay();
}void mouse(int btn, int state, int x, int y)
{if(btn==GLUT_LEFT_BUTTON && state == GLUT_DOWN) axis = 0;if(btn==GLUT_MIDDLE_BUTTON && state == GLUT_DOWN) axis = 1;if(btn==GLUT_RIGHT_BUTTON && state == GLUT_DOWN) axis = 2;
}void display()
{glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);glLoadIdentity();glRotatef(theta[0], 1.0, 0.0, 0.0);glRotatef(theta[1], 0.0, 1.0, 0.0);glRotatef(theta[2], 0.0, 0.0, 1.0); colorcube();glutSwapBuffers();
}注意,由于回调函数的参数形式是固定的,类似于theta和axis等变量必须定义为全局变换,照相机信息在标准的形状改变回调函数中定义。
6、在OpenGL模型视图矩阵(model-view matrix)可以用来定位照相机(虽然可以利用旋转和平移实现,但采用gluLookat()会更简单直观)、建立对象模型。投影矩阵用来定义视景体以及选择照相机镜头。虽然两者有同样的函数进行处理,但应用时必须非常仔细,因为累加的改变总是右乘到CTM上。例如,用同样的旋转矩阵作用模型视图矩阵和投影矩阵并不是等价的操作:
7、交互计算机图形学的一个主要问题就是如何应用二维的设备(如鼠标)控制三维的对象?方法:①应用屏幕区域(根据不同的鼠标按钮状态,利用到中心点的距离控制角度、位置、放缩);②Virtual trackball虚拟跟踪球;③三维输入设备。
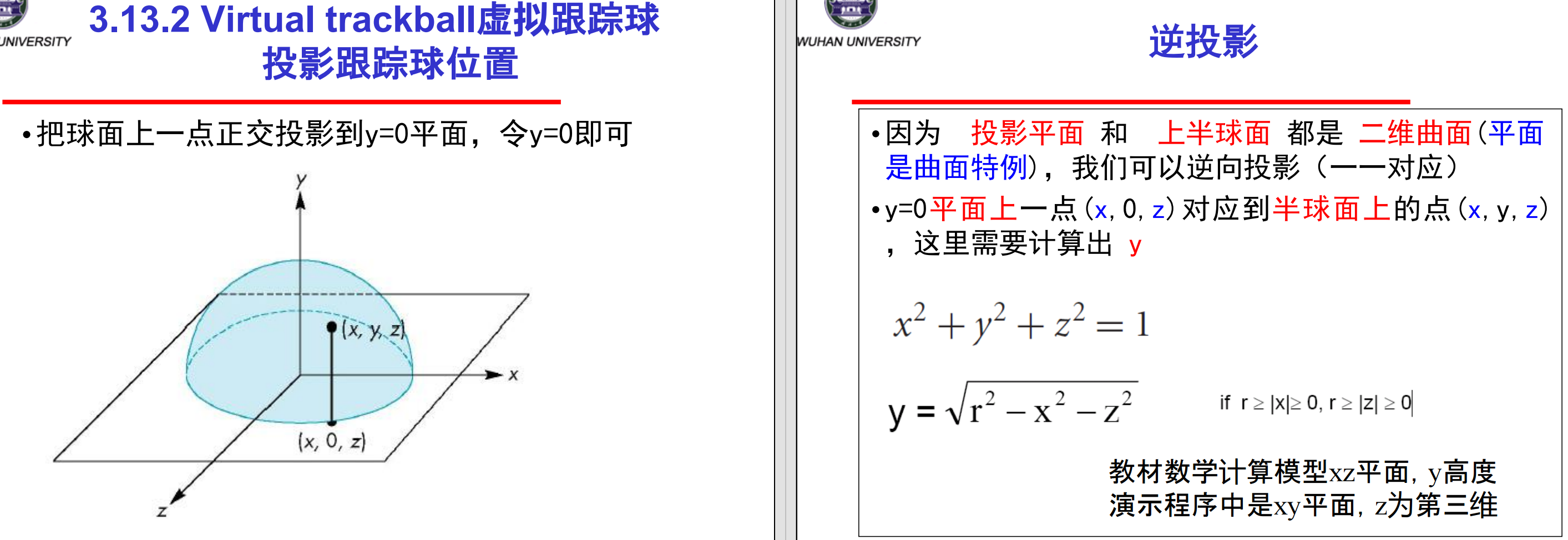
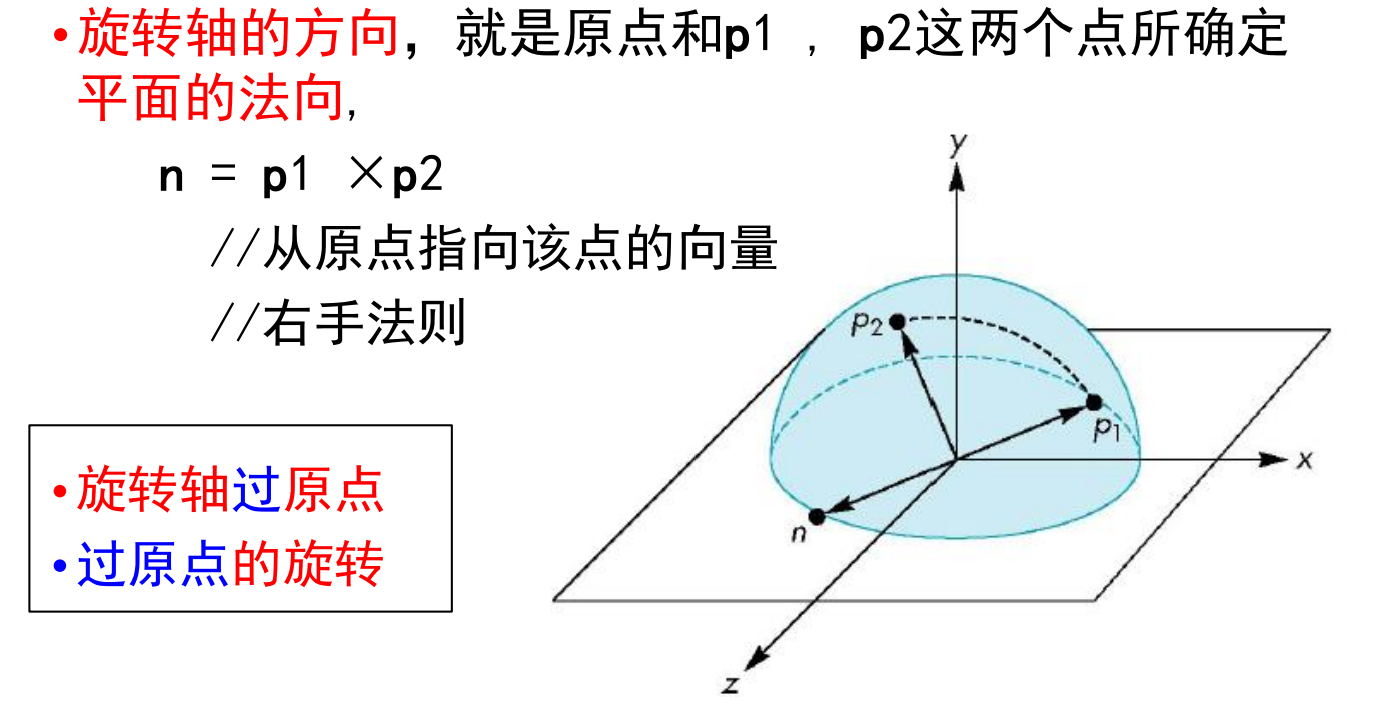
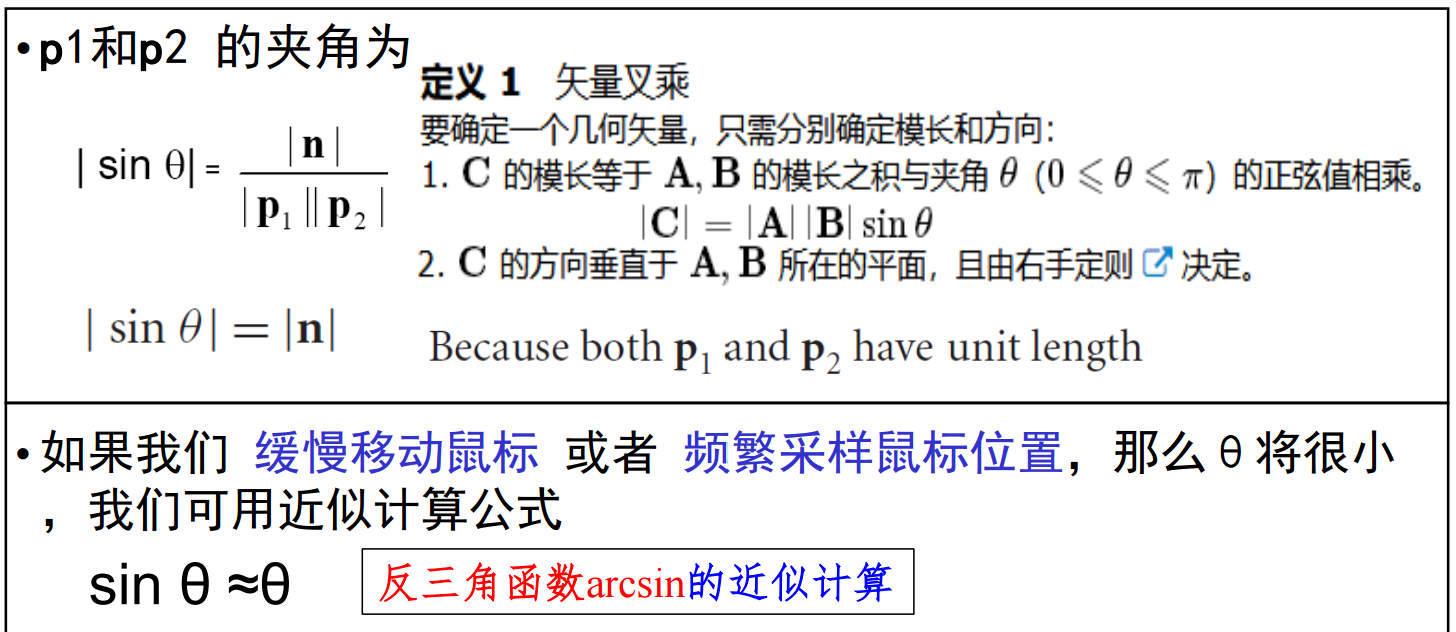
当我们从鼠标得到两个点,就可以把它们投影到半球面上的点p1和p2,这两个点确定了球面上的一个大圆,找到恰当的旋转轴和旋转角度就可以把p1旋转到p2,如下图:
8、 Smooth Rotation光滑旋转。①小增量方法:从实际的标准来看,需要通过变换来光滑移动和旋转一个对象,问题是给出一个模型视图矩阵列M0, M1, …, Mn使得当把它们作用到一个或多个对象上时,采用很小增量,但是用户观察来看,不光滑。②大圆方法:在定向对象时,可以利用一个事实,那就是任一旋转对应着球面上的大圆的一部分,那就只需求出旋转轴与角度即可(如虚拟跟踪球)。
9、前面两种途径对于一组旋转矩阵R0,R1,…..,Rn, f求出每个的Euler角,从而应用Ri= Riz Riy Rix不是很有效(不光滑)。利用最终的位置确定旋转轴与旋转角度,从而增加这个角度,光滑。四元数方法比上述两种方法都有效。四元数由威廉·卢云·哈密顿在1843年爱尔兰发现,把虚数从二维推广到了三维,需要一个实部和三个虚部i, j, k(q=q0+q1i+q2j+q3k),三个虚部正好对应一个向量。
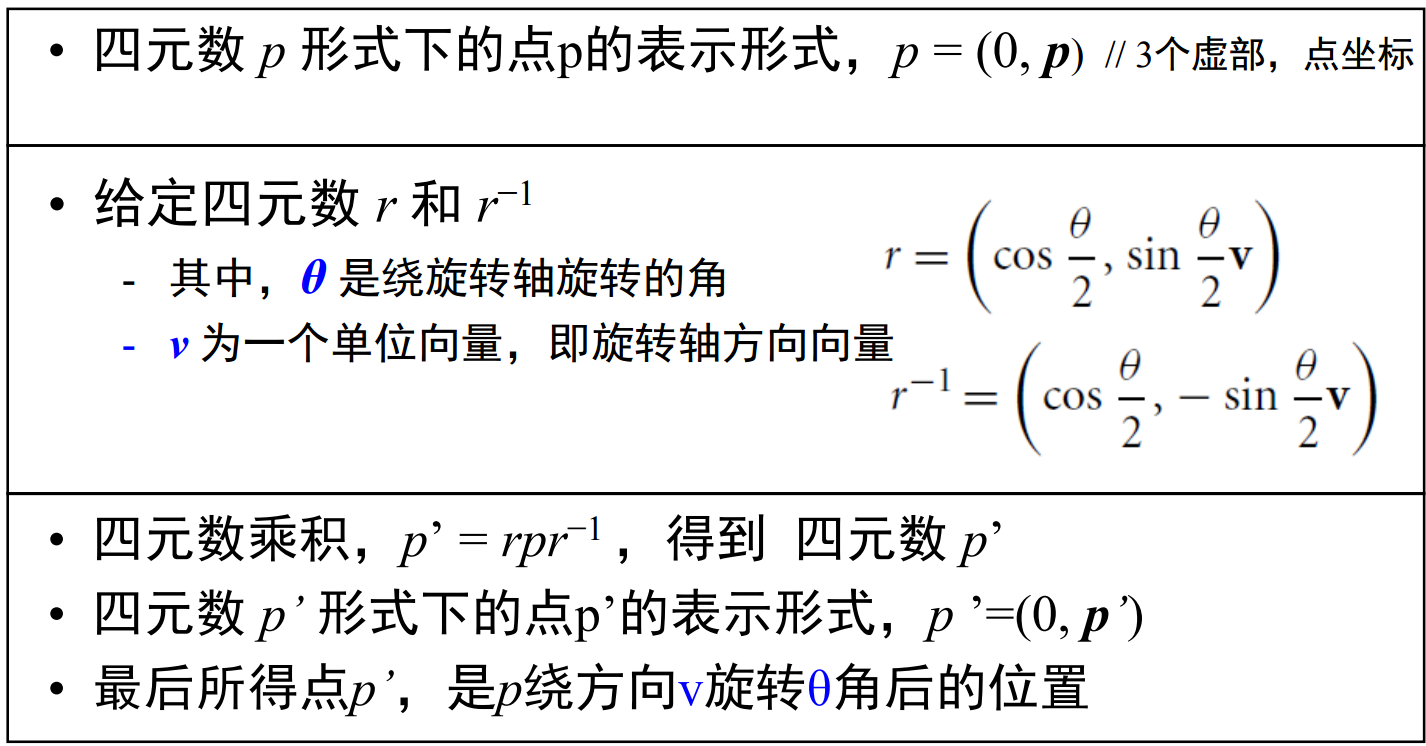
四元数可以表示在球面上的光滑旋转,而且非常有效。处理过程为:①模型视图矩阵 → 四元数;②用四元数进行运算;③四元数 → 模型视图矩阵。