Diffusion 到 Flow Matching ( 从 DDPM 到 Stable Diffusion ) 丝滑入门
第 1 部分:扩散模型 (Diffusion Models)
1.1 核心概念:模拟“破坏-修复”
扩散模型 (Diffusion Model) 是一类深度生成模型,其灵感来源于物理学中的扩散过程(比如墨水滴入水中)。
它的核心思想是模拟两个相反的过程:
-
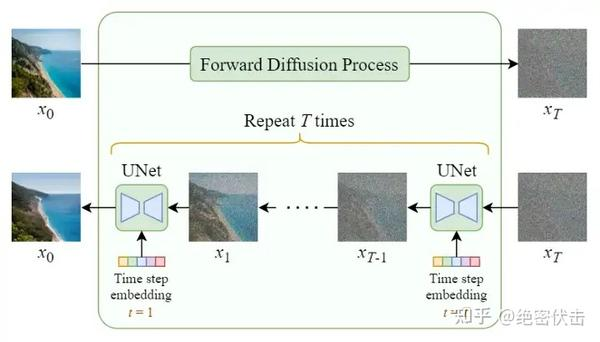
① 正向扩散 (Forward Process - 破坏):
- 这是一个固定的、无可学习参数的过程。
- 它从一张干净的原始数据(如图像 x0x_0x0)出发,在 TTT 个时间步中,逐步、迭代地向图像中添加高斯噪声。
- 直到第 TTT 步,图像 xTx_TxT 变得几乎等同于纯粹的随机噪声。
-
② 反向扩散 (Reverse Process - 修复):
- 这是模型真正学习的部分。
- 模型(通常是一个 U-Net)的任务是逆转上述过程:从纯噪声 xTx_TxT 开始,一步步地、迭代地去除噪声。
- 经过 TTT 步去噪后,模型应该能“修复”或“雕刻”出一张清晰的、符合原始数据分布的图像 x0x_0x0。
1.2 学习机制:一种特殊的“监督学习”
Diffusion 和 Flow Matching 本质上都是一种特殊的监督学习。
它们与传统监督学习(如分类)不同,它们监督的不是最终的“类别标签”,而是**“转换过程”本身**。它们是“以数据分布为目标的、高维的、基于回归的监督学习”。
-
监督目标 (GT) 是什么?
- 在训练时,我们拿一张干净图片 x0x_0x0,随机选择一个时间步 ttt,并加入一个已知的、随机生成的精确噪声 ϵ\epsilonϵ 得到带噪图 xtx_txt。
- 这个已知的噪声 ϵ\epsilonϵ 就是我们要监督的“地面真相”(Ground Truth, GT)。
-
监督形式 (损失函数):
- 模型 ϵθ(xt,t)\epsilon_\theta(x_t, t)ϵθ(xt,t) 的任务就是输入带噪图 xtx_txt 和时间 ttt,然后预测出这个 ϵ\epsilonϵ。
- 损失函数就是均方误差 (MSE):
L∝∣∣ϵ−ϵθ(xt,t)∣∣2L \propto ||\epsilon - \epsilon_\theta(x_t, t)||^2L∝∣∣ϵ−ϵθ(xt,t)∣∣2 - 这本质上就是一个回归任务:模型被训练去回归(预测)那个我们事先知道的、用来“破坏”数据的噪声 ϵ\epsilonϵ。
-
对比 Flow Matching:
- Flow Matching 也是同样的逻辑,但它监督的是**“瞬时速度”**。
- GT 是理论上从噪声导向数据的精确速度向量 v(xt,t)v(x_t, t)v(xt,t)。
- 损失函数是 L∝∣∣v−vθ(xt,t)∣∣2L \propto ||v - v_\theta(x_t, t)||^2L∝∣∣v−vθ(xt,t)∣∣2。
1.3 记忆载体:U-Net 的权重
模型的“记忆”,即它对数据分布(如猫的形状、纹理、结构)的所有知识,绝大部分都集中在 U-Net 的权重中。
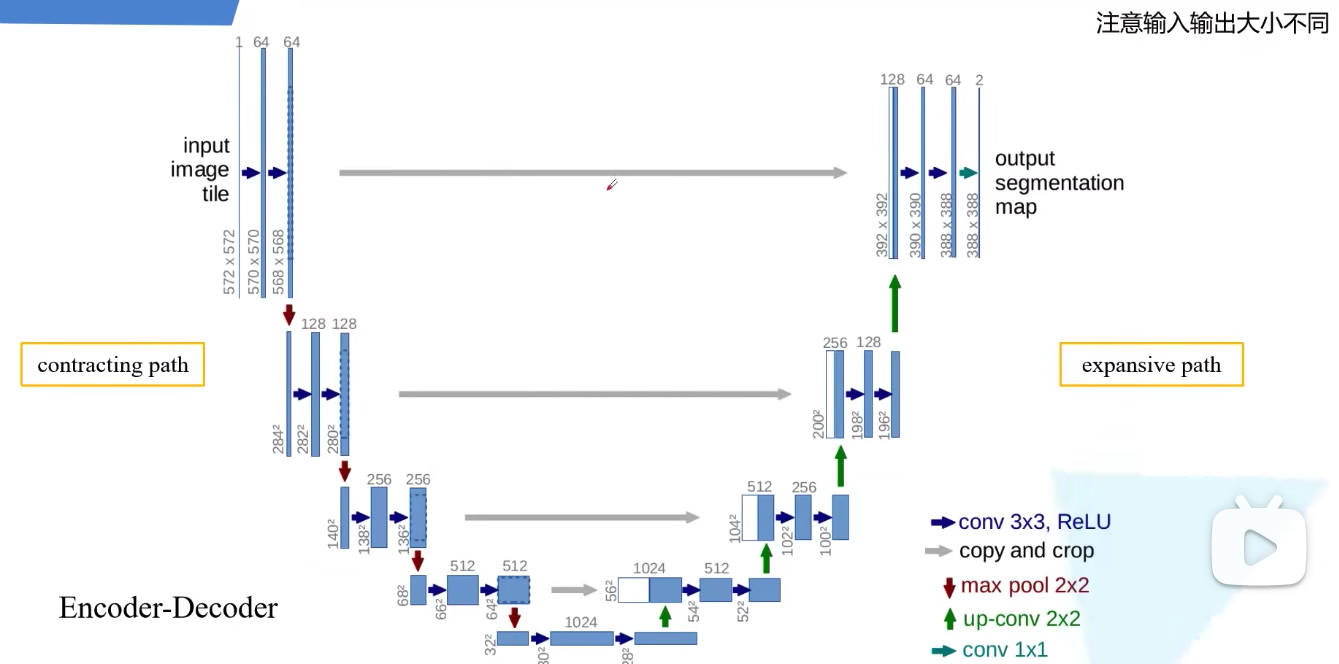
这个 U-Net 的结构非常特别,完美地执行了“噪声预测”这个回归任务:
- 输入: 带噪图像 xtx_txt (如 64x64x3) + 时间嵌入 ttt。
- 1. 编码器 (Encoder / 下采样):
- U-Net 的前半部分通过卷积和池化,将高维(大尺寸、少通道)的图像压缩成低维(小尺寸、多通道)的特征图。
- 例如,从 64x64x3 逐步压缩到 8x8x512。
- 这一步是为了提取图像的抽象语义特征。
- 2. 解码器 (Decoder / 上采样):
- U-Net 的后半部分通过反卷积或上采样,将低维特征图逐步还原回高维图像。
- 例如,从 8x8x512 逐步还原到 64x64x3。
- 这一步是为了恢复图像的细节。
- 3. 跨层连接 (Skip Connections):
- 这是 U-Net 的精髓。它将编码器中(浅层、高分辨率)的特征图“跳过”并直接添加到解码器对应的层上。
- 这确保了模型在还原图像时,不会丢失精细的细节和纹理。
- 输出: 预测的噪声 ϵθ\epsilon_\thetaϵθ (尺寸与输入 xtx_txt 完全相同,如 64x64x3)。
1.4 关键机制:时间步 (类 RNN 循环)
U-Net 像 RNN 是非常精辟的比喻。它在两个方面区别于传统的网络:
-
1. 参数共享 (像 RNN):
- 传统的编码器-解码器,每一层都是独立学习的。
- 而 Diffusion Model 只使用一个 U-Net,并在所有 TTT 个时间步中共享同一套参数。
- 在**推理(生成)**阶段,模型会从 t=Tt=Tt=T 到 t=0t=0t=0 循环调用这个固定的 U-Net。
-
2. 时间嵌入 (Time Embedding):
- 问题: 既然是同一套 U-Net 权重,它如何知道自己当前处于哪个时间步?(例如,t=999t=999t=999 时应大刀阔斧去噪,而 t=10t=10t=10 时应精细修饰)。
- 答案: 我们把时间步 ttt 作为一个额外的输入。
- ttt 通常被编码为一个高维向量(使用正弦/余弦位置编码),这个“时间嵌入”被深度融入到 U-Net 的每一个残差块和注意力层中。
- 作用: 告诉 U-Net “现在循环到哪一步了”,使其能够根据当前进度动态调整关注点(例如,早期关注整体结构,晚期关注细节)。
重要贡献: 原始的扩散模型 [NIPS 2015] 表现不佳。而 DDPM [NeurIPS 2020] 作为“开山之作”,其一大贡献就是系统性地阐述了这种“时间嵌入”对于共享参数的 U-Net 的重要性,并证明了只学习均值(预测噪声 ϵ\epsilonϵ)就足够了。
1.5 综合实例:“监督”一只猫的生成
目标: 训练 U-Net ϵθ\epsilon_\thetaϵθ 学会从噪声中还原出猫。
一次训练迭代 (Training Step):
- 准备数据: 从数据集中取一张清晰的猫图 x0x_0x0。
- 制造“监督数据对”: 随机抽取几个时间步 ttt 和几个高斯噪声 ϵ\epsilonϵ。
- 样本 A (t=999):
- 输入: x0x_0x0 + 99.9% 的已知噪声 ϵA\epsilon_AϵA →\rightarrow→ 得到 x999x_{999}x999 (几乎纯噪声)。
- GT 标签: ϵA\epsilon_AϵA。
- 样本 B (t=500):
- 输入: x0x_0x0 + 50% 的已知噪声 ϵB\epsilon_BϵB →\rightarrow→ 得到 x500x_{500}x500 (中度噪声)。
- GT 标签: ϵB\epsilon_BϵB。
- 样本 C (t=100):
- 输入: x0x_0x0 + 10% 的已知噪声 ϵC\epsilon_CϵC →\rightarrow→ 得到 x100x_{100}x100 (轻微噪声)。
- GT 标签: ϵC\epsilon_CϵC。
- 样本 A (t=999):
- 模型预测与监督 (计算损失):
- 对于样本 A (t=999):
- 模型计算:ϵpred_A=ϵθ(x999,t=999)\epsilon_{pred\_A} = \epsilon_\theta(x_{999}, t=999)ϵpred_A=ϵθ(x999,t=999)。
- 计算损失:LA=∣∣ϵA−ϵpred_A∣∣2L_A = ||\epsilon_A - \epsilon_{pred\_A}||^2LA=∣∣ϵA−ϵpred_A∣∣2。
- 模型学习: 从一团混沌中找到最微弱的“猫”的结构痕迹。这是创造力和多样性的来源,因为模型学会了应对任何随机噪声起点。
- 对于样本 B (t=500):
- 模型计算:ϵpred_B=ϵθ(x500,t=500)\epsilon_{pred\_B} = \epsilon_\theta(x_{500}, t=500)ϵpred_B=ϵθ(x500,t=500)。
- 计算损失:LB=∣∣ϵB−ϵpred_B∣∣2L_B = ||\epsilon_B - \epsilon_{pred\_B}||^2LB=∣∣ϵB−ϵpred_B∣∣2。
- 模型学习: 在大量噪声中识别出猫的宏观结构和轮廓。
- 对于样本 C (t=100):
- 模型计算:ϵpred_C=ϵθ(x100,t=100)\epsilon_{pred\_C} = \epsilon_\theta(x_{100}, t=100)ϵpred_C=ϵθ(x100,t=100)。
- 计算损失:LC=∣∣ϵC−ϵpred_C∣∣2L_C = ||\epsilon_C - \epsilon_{pred\_C}||^2LC=∣∣ϵC−ϵpred_C∣∣2。
- 模型学习: 学习如何修复精细的细节,如胡须、毛发纹理。
- 对于样本 A (t=999):
通过在所有 ttt 上最小化这个损失,U-Net 的权重(记忆)最终被迫学会了从 t=Tt=Tt=T (纯噪声) 到 t=0t=0t=0 (清晰图像) 的完整“修复”路径图。
第 2 部分:条件控制 (Conditional Diffusion)
在第一部分中,我们训练的 U-Net 是一个“盲盒”生成器。它从随机噪声出发,能生成一张高质量的猫图,但我们无法控制生成 什么样 的猫。
问题: 如果我想“干预”这个过程,让模型听我的话,比如生成“一只红色的猫”或“一只宇航员在骑马”,该怎么做?
这就是条件控制 (Conditional Control) 要解决的问题,是连接 DDPM(纯生成)和 Stable Diffusion(可控生成)的核心桥梁,也是 Stable Diffusion 的核心原理。
2.1 核心思想:为 U-Net 引入“导航”
我们不能改变 U-Net 的核心任务(预测噪声 ϵθ\epsilon_\thetaϵθ),但我们可以在它工作时,给它提供“导航信息”。
想象一下,U-Net 就像一个正在雕刻大理石的工匠(从噪声 xTx_TxT 雕刻到图像 x0x_0x0),而“文本提示 (Prompt)”就是我们递给工匠的图纸。

挑战: U-Net 只“认识”两样东西:
- 带噪声的图像 xtx_txt (它要处理的“大理石”)
- 时间步 ttt (它要知道雕刻到哪一步了)
U-Net 根本不认识“文本”这种高级语义。
解决方案 (Stable Diffusion 采用):
- 找一个“翻译官”,把人类的文本“翻译”成 U-Net 能理解的数学语言(向量)。
- 在 U-Net 内部开几个“小窗户”,让“翻译”后的信息(图纸)能在关键时刻递给工匠。
这个“翻译官”就是文本编码器 (Text Encoder),而这个“小窗户”就是交叉注意力 (Cross-Attention) 机制。
2.2 具体例子:“一只戴帽子的宇航员猫”
我们来完整地走一遍,当 U-Net 收到这个提示 (Prompt) 时,内部发生了什么。
步骤 1:文本“翻译” (Text Encoder)
首先,我们不能把“宇航员猫”这几个字直接扔给 U-Net。
- 分词 (Tokenize): 文本被分解成一个个“词元”(Token)。
"A", "cat", "astronaut", "wearing", "a", "hat" - 编码 (Encode): 这些词元被送入一个专门的、预训练好的文本编码器(例如 CLIP Text Encoder)。
- 输出 (Embedding): 编码器输出一系列的上下文向量 (Context Vectors),CCC。
- C1C_1C1 (代表 “A”)
- C2C_2C2 (代表 “cat”)
- C3C_3C3 (代表 “astronaut”)
- …
- 关键: 这一系列向量 CCC 蕴含了提示词的全部语义。这就是我们的“图纸”。
步骤 2:“干预” U-Net (Cross-Attention)
现在,U-Net 开始像往常一样工作(从 t=Tt=Tt=T 循环去噪)。
-
常规路径 (图像侧): 在某个时间步 ttt,带噪图像 xtx_txt 进入 U-Net 的编码器(下采样)。在 U-Net 的中间层,图像被压缩成了一堆图像特征(QQQ)。
- QQQ (Query / 查询): 可以理解为 U-Net 内部的“提问”。比如,图像特征 QiQ_iQi 在“提问”:“我这块区域(比如图像左上角)应该生成什么东西?”
-
干预路径 (文本侧): 我们把上一步得到的上下文向量 CCC 作为“回答”的候选。
- KKK (Key / 键): CCC 向量充当“键”,代表每个词的“身份”。
- VVV (Value / 值): CCC 向量也充当“值”,代表每个词的“内容”。
-
交叉注意力 (Q, K, V 匹配):
- U-Net 的图像特征 QiQ_iQi(“我这块区域要画啥?”)会和所有文本词元 KKK(Kcat,Kastronaut,KhatK_{cat}, K_{astronaut}, K_{hat}Kcat,Kastronaut,Khat…)进行匹配度计算。
- 假设: 如果 QiQ_iQi 这个区域在之前的去噪中已经隐约呈现出“猫头”的轮廓,那么它与 KhatK_{hat}Khat (“帽子”) 的匹配度就会非常高。
- 结果: 匹配度最高的 KhatK_{hat}Khat 对应的 VhatV_{hat}Vhat(“帽子”的内容)就会被选中,并被注入 (Inject) 到 QiQ_iQi 中,成为新的图像特征。
执行过程(类比):
- t=990 (混沌期): U-Net 问:“这里一团糟,我该画啥?” →\rightarrow→ 文本 CCC 回答:“画个‘宇航员’和‘猫’的轮廓。”
- t=500 (轮廓期): U-Net 问:“我画出了一个猫头,上面这块是啥?” →\rightarrow→ 交叉注意力机制发现 Q猫头上⋅KhatQ_{猫头上} \cdot K_{hat}Q猫头上⋅Khat 匹配度最高 →\rightarrow→ 注入 VhatV_{hat}Vhat 的信息 →\rightarrow→ U-Net 开始在猫头上画“帽子”。
- t=10 (细节期): U-Net 问:“帽檐这里要什么纹理?” →\rightarrow→ 交叉注意力再次注入 VhatV_{hat}Vhat 的细节信息 →\rightarrow→ U-Net 精修帽檐。
总结:
交叉注意力,就是在 U-Net 内部(通常是其中间层和解码器层)加入的“导航站”。在去噪的每一步,U-Net 都会停下来,通过这个机制“看一眼”文本图纸,让图像特征和文本语义对齐,然后再继续下一步去噪。
2.3 关键技巧:Classifier-Free Guidance (CFG)
我们已经“干预”了 U-Net,但还有一个问题:U-Net 有多“听话”?
有时候,模型可能“偷懒”,它更倾向于生成它最熟悉的(比如一张普通的猫),而不是你想要的(戴帽子的宇航员猫)。
CFG (无分类器指导) 是一个强大的技巧,用来控制模型对提示词的“遵从度”。
原理: 在每一步 ttt,我们实际上让 U-Net 做了两次噪声预测:
- 预测 1 (有条件): ϵθ(xt,t,"宇航员猫")\epsilon_\theta(x_t, t, \text{"宇航员猫"})ϵθ(xt,t,"宇航员猫")
- 即我们刚刚描述的、受交叉注意力“干预”的预测。
- 预测 2 (无条件): ϵθ(xt,t,"")\epsilon_\theta(x_t, t, \text{""})ϵθ(xt,t,"")
- 我们用一个空的、无意义的提示词(或干脆去掉干预),让 U-Net “自由发挥”,预测它最想画的东西(比如一张普通的猫)。
计算:
- 我们得到了两个预测:ϵcond\epsilon_{cond}ϵcond (你想要的) 和 ϵuncond\epsilon_{uncond}ϵuncond (它想画的)。
- 指导方向: (ϵcond−ϵuncond)(\epsilon_{cond} - \epsilon_{uncond})(ϵcond−ϵuncond) 这个向量,指向了从“普通猫”到“宇航员猫”的“进化方向”。
最终预测:
ϵfinal=ϵuncond+w×(ϵcond−ϵuncond)\epsilon_{final} = \epsilon_{uncond} + w \times (\epsilon_{cond} - \epsilon_{uncond})ϵfinal=ϵuncond+w×(ϵcond−ϵuncond)
- www 就是指导系数 (Guidance Scale)。
- w=0w=0w=0: ϵfinal=ϵuncond\epsilon_{final} = \epsilon_{uncond}ϵfinal=ϵuncond (完全不听提示,自由发挥)。
- w=1w=1w=1: ϵfinal=ϵcond\epsilon_{final} = \epsilon_{cond}ϵfinal=ϵcond (标准干预)。
- w>1w > 1w>1 (如 7.5): 我们在“普通”的基础上,超量地、夸张地加上了“宇航员猫”的特征。这迫使 U-Net 必须严格遵从提示词,生成更贴合、更鲜明的结果。
小结:
U-Net 依然是那个基于回归的噪声预测器(第一部分的核心)。而条件控制(Stable Diffusion)的魔法在于:
- 使用 Text Encoder 将提示词“翻译”成 CCC 向量。
- 在 U-Net 内部加入 Cross-Attention 层,在每一步 ttt 都将图像 QQQ 和文本 K,VK, VK,V 对齐,实现“干预”。
- 使用 CFG 技巧,通过对比“有条件”和“无条件”的预测,放大提示词的影响力,让 U-Net 严格“听话”。
第 3 部分:新范式——作为“生成式监督”的 Diffusion
为什么 Diffusion 和 Flow Matching 这类技术正迅速成为 VLA(视觉-语言-动作)和模仿学习(Imitation Learning)领域“动作专家(Action Experts)”或“策略(Policy)”的首选监督框架?
在第 1 部分和第 2 部分,我们明确了 U-Net 是如何通过“回归噪声”来学习整个数据分布的。现在,我们拔高一个层次,探讨一个核心观点:
Diffusion 不是一个传统的“监督头”,它是一种“生成学习框架”。
3.1 传统监督头 vs. 生成式监督框架
我们先来做一个对比,以 模仿学习(Imitation Learning) 中的“动作预测”为例。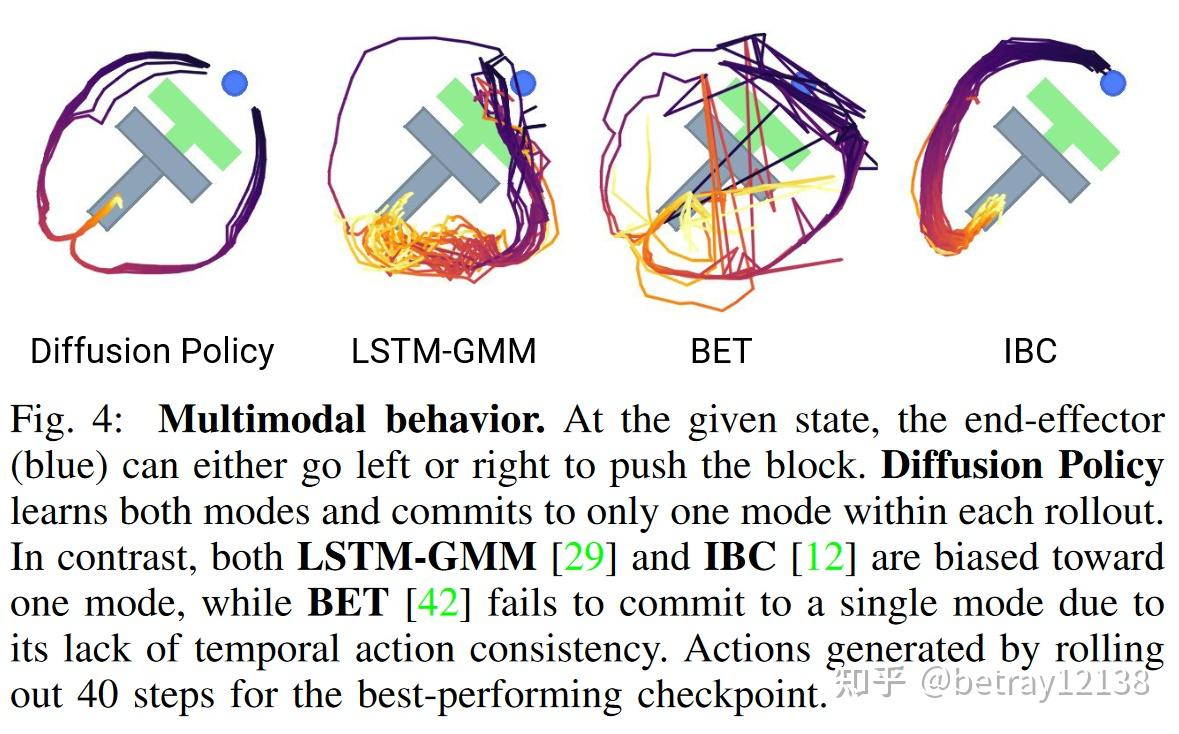
上图中的行为克隆(BC)就是一种监督学习/模仿学习;LSTM 是一种可适配 L2 自回归的模型;
模仿学习的目标: 学习一个策略,根据当前的“观察”(Observation,如图像、语言指令),预测出机器人下一步应该执行的“动作”(Action,如关节角度、末端轨迹)。
传统监督头 (如 L2 回归):
- 做法: 假设我们有 1000 个人类演示(GT 轨迹)。在某个相同状态 SSS 下,人类 A 走了轨迹 AAA,人类 B 走了轨迹 BBB。
- 模型: 一个简单的回归头(如 MLP)被训练来最小化预测动作 apreda_{pred}apred 和真实动作 aGTa_{GT}aGT 之间的 L2 损失(均方误差)。
- 问题 (模式平均 Mode Averaging):
- 为了最小化在 AAA 和 BBB 上的平均损失,这个“笨拙”的回归头最终会学会预测一个介于 AAA 和 BBB 之间的、物理上不存在的“折衷”动作 CCC。
- 这个动作 CCC 既不是 AAA 也不是 BBB,它可能是一个无效、抖动或不自然的动作。
- 结论: 传统回归头无法处理“多样性”。它假设在同一输入下只有一个正确答案,当存在多个正确答案时,它会崩溃并输出所有答案的平庸平均值。
生成式监督框架 (Diffusion / Flow Matching):
- 做法: 我们同样用这 1000 个演示 A,B,...A, B, ...A,B,... 来训练。
- 模型: 我们训练一个 Diffusion Policy (或 Flow Policy)。这个模型学习的不是“预测一个动作”,而是学习 P(Action∣Observation)P(Action | Observation)P(Action∣Observation) 这个“概率分布”本身。
- 监督信号: 正如第 1 部分所述,它的损失函数是“回归噪声”或“回归速度”。
- 优势 (解决多样性):
- Diffusion 框架被迫学习整个分布。它在训练中看到过轨迹 AAA(通过去噪 ϵA\epsilon_AϵA),也看到过轨迹 BBB(通过去噪 ϵB\epsilon_BϵB)。
- 它不会去“平均” AAA 和 BBB。相反,它在自己的权重(U-Net)中记住了:从 SSS 出发,有两条“合法”的去噪路径,一条通往 AAA,一条通往 BBB。
- 结论: Diffusion 完美地解决了“创造性 (Creativity)” 和 “多样性 (Diversity)” 的监督问题。它承认在同一情境下,存在多种同样“正确”的解决方案。
3.2 具体例子:VLA 中的“动作专家” (Diffusion Policy)
让我们看看这在 VLA 模仿学习中是如何具体应用的。
场景: 一个机器人手臂需要根据指令“请把那个红苹果递给我”来规划未来 2 秒的动作轨迹(Action Horizon)。
- Observation (输入): 摄像头图像 + 文本指令 “…”。
- Action (GT 标签): 人类专家演示的 2 秒钟(例如 100 帧)的关节角度序列 AGTA_{GT}AGT。这是一个高维向量(例如 100 帧 x 7 关节)。
传统回归头 (失败):
如果用 L2 损失,模型会试图预测一个“平均”的轨迹。如果专家演示时,一半是从左边抓,一半是从右边抓,模型会预测一个从中间穿过去的、撞到桌子的轨迹。这导致了创造力的缺失。
Diffusion Policy (成功):
-
训练 (监督过程):
- 我们拿到 GT 轨迹 AGTA_{GT}AGT。
- 像第 1 部分一样,我们加入随机噪声 ϵ\epsilonϵ,得到带噪轨迹 AtA_tAt。
- U-Net 的任务: 输入 (Observation, AtA_tAt, ttt),预测 ϵ\epsilonϵ。
- 损失函数: L=∣∣ϵ−ϵθ(Observation,At,t)∣∣2L = ||\epsilon - \epsilon_\theta(\text{Observation}, A_t, t)||^2L=∣∣ϵ−ϵθ(Observation,At,t)∣∣2。
- 关键: 这里的 Observation(图像+文本)扮演了第 2 部分中“条件控制”的角色。它通过交叉注意力机制被注入 U-Net,指导 U-Net 的去噪方向。
-
推理 (生成动作):
- 我们从一个完全随机的噪声轨迹 ATA_TAT(未来 2 秒的随机抖动)开始。
- 我们输入当前的 (Observation)。
- 模型(U-Net)从 t=Tt=Tt=T 循环到 t=0t=0t=0,在 Observation 的强力引导下,一步步地将这个“随机抖动” ATA_TAT “雕刻”成一条清晰、平滑、且多样化的动作轨迹 A0A_0A0。
- 多样性的体现: 每次我们从不同的随机噪声 ATA_TAT 开始,模型就会生成一条不同的、但同样合理的轨迹(比如,这次从左边抓,下次从右边抓)。
小结:
Diffusion 和 Flow Matching 不是简单的“监督头”,它们是高维概率分布的建模框架。
它们通过其独特的“回归噪声/速度”损失函数,迫使模型学习数据分布中的所有模式(Modes),而不是像 L2 损失那样崩溃为平庸的平均值。
这使得它们成为监督 VLA 动作专家这类具有“创造性”和“多样性”(即多模态,Multi-Modal)输出的完美工具。
第 4 部分:演变——从 Diffusion 的“随机阶梯”到 Flow Matching 的“直线高速”
在第 3 部分,我们确定了 Diffusion 是一种强大的“生成式监督”框架。但它有一个(曾经)臭名昭著的缺点:慢。
- Diffusion (DDPM):需要 TTT 步(比如 1000 步)才能从纯噪声 xTx_TxT“雕刻”回 x0x_0x0。这意味着一次推理(生成)需要调用 1000 次 U-Net。
- Flow Matching:它的出现,很大程度上是为了解决这个问题。它旨在学习一个更“高效”的路径。
4.1 核心区别:随机 SDE vs. 确定性 ODE
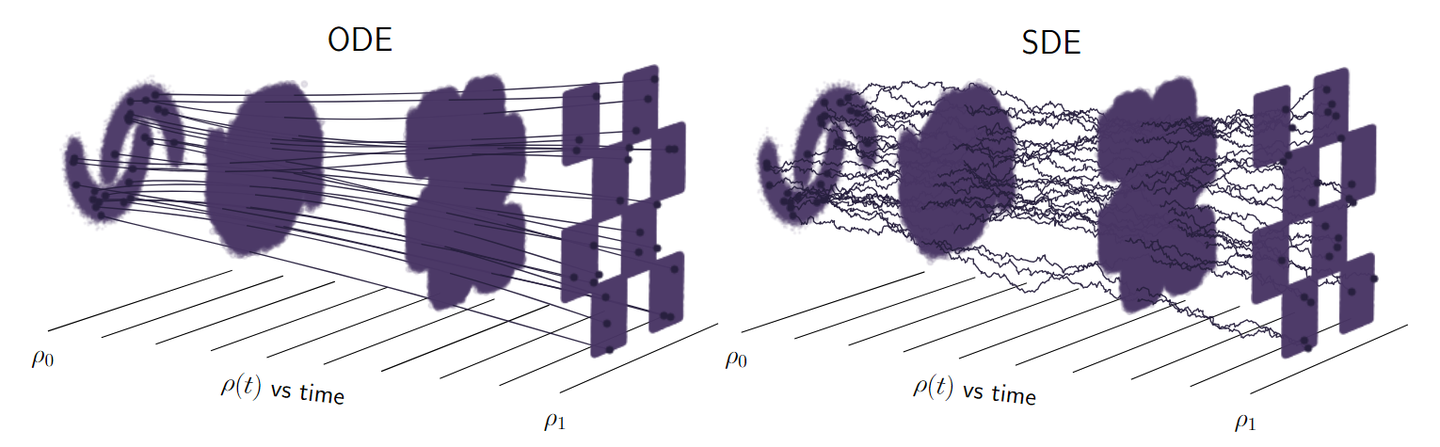
上图来源/进阶推荐:https://zhuanlan.zhihu.com/p/4116861550
-
Diffusion (DDPM/SDE): 它的反向过程(修复)是随机的 (Stochastic)。每一步 ttt 不仅要预测 ϵ\epsilonϵ,还要在结果上再加一点点“随机噪声”。
- 比喻:一个喝醉的工匠在走楼梯。
- 他知道总目标是“下楼”(去噪)。
- 但他每走一步(t→t−1t \rightarrow t-1t→t−1),都会左摇右晃(加入随机性)。
- 他最终还是能下楼(生成图像),但这个路径是摇摇晃晃的、低效的。
-
Flow Matching (ODE): 它学习的是一个确定的 (Deterministic) 路径。
- 比喻:一部在轨道上运行的电梯(或一条直线高速)。
- 它学习的是一个“速度场 (Vector Field)” vvv。
- 在任何时间 ttt、任何位置 xtx_txt,这个 vvv 都会给出一个唯一的、确定的“下一步该走的方向”。
- 从 t=1t=1t=1 (噪声) 到 t=0t=0t=0 (数据) 的路径是平滑且笔直的。
4.2 终极具体实例:从 (0, 0) 移动到 (8, 8)
想象一下,我们的整个“数据分布” x0x_0x0 只有一个点:坐标 (8, 8)。
我们的“噪声分布” x1x_1x1 只有一个点:坐标 (0, 0)。
我们的任务是训练一个模型,学会如何从 (0, 0) 生成 (8, 8)。
A. Diffusion 的训练与推理(随机阶梯)
训练:
- 取数据 x0x_0x0: (8, 8)。
- 正向“破坏”: 我们把 (8, 8) →\rightarrow→ (0, 0) 的过程分成 10 步。我们模拟一个摇摇晃晃走向 (0, 0) 的过程。
- 准备监督对:
- 在 t=5t=5t=5 (中途),数据点 x5x_5x5 可能在 (4.1, 3.8)。
- 我们加入的“真实噪声” ϵA\epsilon_AϵA 是 (0.2, -0.3)。
- 监督对 1: 输入 x5=(4.1,3.8)x_5=(4.1, 3.8)x5=(4.1,3.8) 和 t=5t=5t=5,GT 标签是 ϵA=(0.2,−0.3)\epsilon_A=(0.2, -0.3)ϵA=(0.2,−0.3)。
- 在 t=3t=3t=3,数据点 x3x_3x3 可能在 (6.0, 5.8)。
- 我们加入的“真实噪声” ϵB\epsilon_BϵB 是 (-0.1, 0.1)。
- 监督对 2: 输入 x3=(6.0,5.8)x_3=(6.0, 5.8)x3=(6.0,5.8) 和 t=3t=3t=3,GT 标签是 ϵB=(−0.1,0.1)\epsilon_B=(-0.1, 0.1)ϵB=(−0.1,0.1)。
- 损失: L=∣∣ϵ−ϵθ(xt,t)∣∣2L = ||\epsilon - \epsilon_\theta(x_t, t)||^2L=∣∣ϵ−ϵθ(xt,t)∣∣2。
推理(生成):
- 启动: 从 x10=(0,0)x_{10} = (0, 0)x10=(0,0) 开始。
- 第 1 步 (t=10):
- 模型预测 ϵθ(x10,10)\epsilon_\theta(x_{10}, 10)ϵθ(x10,10) →\rightarrow→ 比如 (0.7, 0.9)。
- 我们计算 x9x_9x9 = (0, 0) + (0.7, 0.9) + 一点随机噪声 →\rightarrow→ 得到 x9=(0.8,0.85)x_9 = (0.8, 0.85)x9=(0.8,0.85)。
- 第 2 步 (t=9):
- 模型预测 ϵθ(x9,9)\epsilon_\theta(x_9, 9)ϵθ(x9,9) →\rightarrow→ 比如 (0.8, 0.7)。
- 我们计算 x8x_8x8 = (0.8, 0.85) + (0.8, 0.7) + 一点随机噪声 →\rightarrow→ 得到 x8=(1.5,1.6)x_8 = (1.5, 1.6)x8=(1.5,1.6)。
- …
- 第 10 步 (t=1):
- 模型预测 ϵθ(x1,1)\epsilon_\theta(x_1, 1)ϵθ(x1,1) →\rightarrow→ …
- 最终得到 x0≈(8.1,7.9)x_0 \approx (8.1, 7.9)x0≈(8.1,7.9)。
结论: 我们到达了 (8, 8),但走了 10 步,而且因为每一步的随机性,路径是弯曲的。
B. Flow Matching 的训练与推理(直线高速)
训练:
- 取数据 x0x_0x0: (8, 8)。取噪声 x1x_1x1: (0, 0)。
- 定义“高速公路”: 从 x1x_1x1 到 x0x_0x0 的直线路径。
- 定义“速度 GT”: 在这条直线上,从起点 (0, 0) 指向终点 (8, 8) 的速度向量 (Velocity Vector) 是什么?
- 答案是恒定的:vGT=x0−x1=(8,8)−(0,0)=(8,8)v_{GT} = x_0 - x_1 = (8, 8) - (0, 0) = (8, 8)vGT=x0−x1=(8,8)−(0,0)=(8,8)。
- 这个 vGTv_{GT}vGT 就是我们要监督的唯一目标。
- 准备监督对:
- 随机取一个时间 t=0.3t=0.3t=0.3: * 在直线路上的 xtx_txt 是:xt=(1−t)x1+t⋅x0=0.7⋅(0,0)+0.3⋅(8,8)=(2.4,2.4)x_t = (1-t)x_1 + t \cdot x_0 = 0.7 \cdot (0,0) + 0.3 \cdot (8,8) = (2.4, 2.4)xt=(1−t)x1+t⋅x0=0.7⋅(0,0)+0.3⋅(8,8)=(2.4,2.4)。
- 监督对 1: 输入 xt=(2.4,2.4)x_t=(2.4, 2.4)xt=(2.4,2.4) 和 t=0.3t=0.3t=0.3,GT 标签是 vGT=(8,8)v_{GT}=(8, 8)vGT=(8,8)。
- 随机取一个时间 t=0.8t=0.8t=0.8:
- 在直线路上的 xtx_txt 是:xt=0.2⋅(0,0)+0.8⋅(8,8)=(6.4,6.4)x_t = 0.2 \cdot (0,0) + 0.8 \cdot (8,8) = (6.4, 6.4)xt=0.2⋅(0,0)+0.8⋅(8,8)=(6.4,6.4)。
- 监督对 2: 输入 xt=(6.4,6.4)x_t=(6.4, 6.4)xt=(6.4,6.4) 和 t=0.8t=0.8t=0.8,GT 标签是 vGT=(8,8)v_{GT}=(8, 8)vGT=(8,8)。
- 损失: L=∣∣vGT−vθ(xt,t)∣∣2=∣∣(8,8)−vθ(xt,t)∣∣2L = ||v_{GT} - v_\theta(x_t, t)||^2 = ||(8, 8) - v_\theta(x_t, t)||^2L=∣∣vGT−vθ(xt,t)∣∣2=∣∣(8,8)−vθ(xt,t)∣∣2。模型 vθv_\thetavθ 被迫在高速公路上的任何一点,都要能预测出那个恒定的、指向终点的速度 (8, 8)。
推理(生成):
- 启动: 从 x1=(0,0)x_1 = (0, 0)x1=(0,0) 开始。
- 询问模型: vθ(x1,1.0)v_\theta(x_1, 1.0)vθ(x1,1.0)?
- 模型回答: (理想情况下) v=(8,8)v = (8, 8)v=(8,8)。
- 求解 ODE:
- 如果我们想一步到位 (Rectified Flow):
- x0=x1+1.0×v=(0,0)+(8,8)=(8,8)x_0 = x_1 + 1.0 \times v = (0, 0) + (8, 8) = (8, 8)x0=x1+1.0×v=(0,0)+(8,8)=(8,8)。
- 一步! 我们只调用了 1 次模型就完成了生成。
- 如果我们想更精确(走 10 步):
- x0.9=x1+0.1×v=(0,0)+0.1×(8,8)=(0.8,0.8)x_{0.9} = x_1 + 0.1 \times v = (0, 0) + 0.1 \times (8, 8) = (0.8, 0.8)x0.9=x1+0.1×v=(0,0)+0.1×(8,8)=(0.8,0.8)。
- x0.8=x0.9+0.1×v=(0.8,0.8)+0.1×(8,8)=(1.6,1.6)x_{0.8} = x_{0.9} + 0.1 \times v = (0.8, 0.8) + 0.1 \times (8, 8) = (1.6, 1.6)x0.8=x0.9+0.1×v=(0.8,0.8)+0.1×(8,8)=(1.6,1.6)。
- …
- 最终 x0=(8,8)x_0 = (8, 8)x0=(8,8)。
- 如果我们想一步到位 (Rectified Flow):
结论: 我们不仅能一步到达 (8, 8),而且即使分 10 步走,走的也是一条笔直的、确定的高速公路,没有任何随机性。
4.3 对 VLA 模仿学习的启示
- Diffusion (第 3 部分): 它能学习多模态动作(多样性)。但它需要 100 步推理才能规划一个动作,这对于实时机器人来说太慢了。
- Flow Matching (演变):
- 它同样能学习多模态动作(如果 x0x_0x0 是一个分布)。
- 但它学习的是一个“确定性”的路径,使其推理速度极快。
- 训练一个 Flow Matching 策略,模型 vθ(Observation,At,t)v_\theta(\text{Observation}, A_t, t)vθ(Observation,At,t) 学习预测从“随机动作” A1A_1A1 指向“专家动作” A0A_0A0 的速度 vGT=A0−A1v_{GT} = A_0 - A_1vGT=A0−A1。
- 在推理时,机器人只需调用模型 1-4 次,就能从随机噪声 A1A_1A1 和速度 vvv 计算出 A0=A1+vA_0 = A_1 + vA0=A1+v,从而规划出未来 2 秒的完整动作。
- 这就是实现实时、高水平模仿学习的关键。