Autoware.universe多点导航和避障绕障设置
一、多点导航
1.1 下载wp_map_tools工具
链接:https://github.com/6-robot/wp_map_tools
使用步骤:
- 安装依赖
sudo apt update cd wp_map_tools/scripts/ ./install_for_humble.sh - 编译
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select wp_map_tools
1.2集成autoware
因为这里没有仿真程序,直接启动会报错。集成到autoware需要知道依赖下面话题自己编写程序
autoware topic/planning/mission_planning/goaltype: geometry_msgs::msg::PoseStamped功能:发送目标点消息/planning/mission_planning/statetype: tier4_planning_msgs::msg::RouteState功能:返回autoware路由状态,state字段为4代表可路由,为6代表已经到达目标点/autoware/engagetype: autoware_vehicle_msgs::msg::Engage功能:启动车辆自动驾驶功能wp_map_tools topic/waterplus/add_waypointtype: wp_map_tools::msg::Waypoint功能 接受设置的目标航点(支持多个)实现逻辑为:接收目标航点 -> 存储到目标航点到队列 -> 发送目标航点到autoware -> 接收是否到达目标点 -> 弹出队头航点 -> 取出下一个航点并发布 -> 启动自动驾驶功能 -> 直到队列为空
demo程序
在wp_map_tools工具的src新建一个文件,编写demo,修改package.xmi & CMakeLists.txt文件,重新编译:
#include <rclcpp/rclcpp.hpp>
#include <queue>
#include <mutex>
#include <memory>
#include "wp_map_tools/msg/waypoint.hpp"
#include <geometry_msgs/msg/pose_stamped.hpp>
#include <tier4_planning_msgs/msg/route_state.hpp>
#include <autoware_vehicle_msgs/msg/engage.hpp>// 线程安全的 Waypoint 队列
class WaypointQueue {
public:void push(const wp_map_tools::msg::Waypoint& wp) {std::lock_guard<std::mutex> lock(mutex_);queue_.push(wp);}bool pop(wp_map_tools::msg::Waypoint& wp) {std::lock_guard<std::mutex> lock(mutex_);if (queue_.empty()) {return false;}wp = queue_.front();queue_.pop();return true;}// 读取队头元素(不弹出),成功返回 truebool peek(wp_map_tools::msg::Waypoint& wp) const {std::lock_guard<std::mutex> lock(mutex_);if (queue_.empty()) {return false;}wp = queue_.front(); // 只读取,不 popreturn true;}size_t size() const {std::lock_guard<std::mutex> lock(mutex_);return queue_.size();}private:mutable std::mutex mutex_;std::queue<wp_map_tools::msg::Waypoint> queue_;
};// ROS 2 节点示例
class WaypointProcessorNode : public rclcpp::Node {
public:WaypointProcessorNode() : Node("waypoint_processor_node") {subscription_ = this->create_subscription<wp_map_tools::msg::Waypoint>("/waterplus/add_waypoint", 10,std::bind(&WaypointProcessorNode::waypointCallback, this, std::placeholders::_1));RouteState_sub_ = this->create_subscription<tier4_planning_msgs::msg::RouteState>("/planning/mission_planning/state", 10,std::bind(&WaypointProcessorNode::routeStateCallback, this, std::placeholders::_1));pose_pub_ = this->create_publisher<geometry_msgs::msg::PoseStamped>("/planning/mission_planning/goal", 10); // 发布目标点auto_pub_ = this->create_publisher<autoware_vehicle_msgs::msg::Engage>("/autoware/engage", 10); // 发布目标点is_first_received_waypoint_ = true;}private:void routeStateCallback(const tier4_planning_msgs::msg::RouteState::SharedPtr msg) {wp_map_tools::msg::Waypoint head_wp;switch(msg->state){case 2:if (waypoint_queue_.peek(head_wp)) {RCLCPP_WARN(this->get_logger(), "Received waypoint is inaccessible: %s", head_wp.name.c_str());} else {RCLCPP_WARN(this->get_logger(), "Queue is empty!");}break;case 4:if (waypoint_queue_.peek(head_wp)) {RCLCPP_WARN(this->get_logger(), "Received waypoint is accessible: %s", head_wp.name.c_str());} else {RCLCPP_WARN(this->get_logger(), "Queue is empty!");}break;case 6:if (waypoint_queue_.peek(head_wp)) {RCLCPP_INFO(this->get_logger(), "Received waypoint is arrived : %s", head_wp.name.c_str());this->processQueue();rclcpp::sleep_for(std::chrono::seconds(1));if (waypoint_queue_.peek(head_wp)){ // 没有目标点就不启动autoware_vehicle_msgs::msg::Engage auto_cmd;auto_cmd.stamp = this->now();auto_cmd.engage = true;auto_pub_->publish(auto_cmd);}else{ // 达到最后一个点的时候,清空状态标志,可以继续设置下一个目标点is_first_received_waypoint_ = true;}}break;default:break;}}void waypointCallback(const wp_map_tools::msg::Waypoint::SharedPtr msg) {if (is_first_received_waypoint_){auto pose_msg = geometry_msgs::msg::PoseStamped();pose_msg.header.stamp = this->now();pose_msg.header.frame_id = "map";// 假设 Waypoint 包含 x, y, zpose_msg.pose.position.x = msg->pose.position.x;pose_msg.pose.position.y = msg->pose.position.y;pose_msg.pose.position.z = msg->pose.position.z;// 单位四元数pose_msg.pose.orientation.x = msg->pose.orientation.x;pose_msg.pose.orientation.y = msg->pose.orientation.y;pose_msg.pose.orientation.z = msg->pose.orientation.z;pose_msg.pose.orientation.w = msg->pose.orientation.w;// 发布 PoseStampedpose_pub_->publish(pose_msg);RCLCPP_INFO(this->get_logger(), "Received waypoint name: %s", msg->name.c_str());is_first_received_waypoint_ = false;}waypoint_queue_.push(*msg);}void processQueue() {wp_map_tools::msg::Waypoint wp;if (waypoint_queue_.pop(wp)) { // 仅尝试弹出一个元素RCLCPP_INFO(this->get_logger(), "Pop waypoint name: %s", wp.name.c_str());wp_map_tools::msg::Waypoint head_wp;if (waypoint_queue_.peek(head_wp)) {RCLCPP_WARN(this->get_logger(), "Received waypoint is inaccessible: %s", head_wp.name.c_str());auto pose_msg = geometry_msgs::msg::PoseStamped();pose_msg.header.stamp = this->now();pose_msg.header.frame_id = "map";// 假设 Waypoint 包含 x, y, zpose_msg.pose.position.x = head_wp.pose.position.x;pose_msg.pose.position.y = head_wp.pose.position.y;pose_msg.pose.position.z = head_wp.pose.position.z;// 单位四元数pose_msg.pose.orientation.x = head_wp.pose.orientation.x;pose_msg.pose.orientation.y = head_wp.pose.orientation.y;pose_msg.pose.orientation.z = head_wp.pose.orientation.z;pose_msg.pose.orientation.w = head_wp.pose.orientation.w;// 发布 PoseStampedpose_pub_->publish(pose_msg);} else {RCLCPP_WARN(this->get_logger(), "Queue is empty!");}}// 如果队列为空,什么也不做}rclcpp::Subscription<wp_map_tools::msg::Waypoint>::SharedPtr subscription_;rclcpp::Subscription<tier4_planning_msgs::msg::RouteState>::SharedPtr RouteState_sub_;rclcpp::Publisher<geometry_msgs::msg::PoseStamped>::SharedPtr pose_pub_;rclcpp::Publisher<autoware_vehicle_msgs::msg::Engage>::SharedPtr auto_pub_;WaypointQueue waypoint_queue_;bool is_first_received_waypoint_;
};int main(int argc, char* argv[]) {rclcpp::init(argc, argv);auto node = std::make_shared<WaypointProcessorNode>();rclcpp::spin(node);rclcpp::shutdown();return 0;
}新添加一个launch文件:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Nodedef generate_launch_description():launch_file_dir = os.path.join(get_package_share_directory('wp_map_tools'), 'launch')wp_edit_cmd = Node(package='wp_map_tools',executable='wp_edit_node',name='wp_edit_node',output='screen')map_tool = Node(package='wp_map_tools',executable='demo_map_tools',name='demo_map_tools',output='screen')ld = LaunchDescription()ld.add_action(wp_edit_cmd)ld.add_action(map_tool)return ld一个简单的demo程序就这样完成了,启动autowate的时候,启动这个launch文件就可以是实现多点导航。
具体操作
添加工具
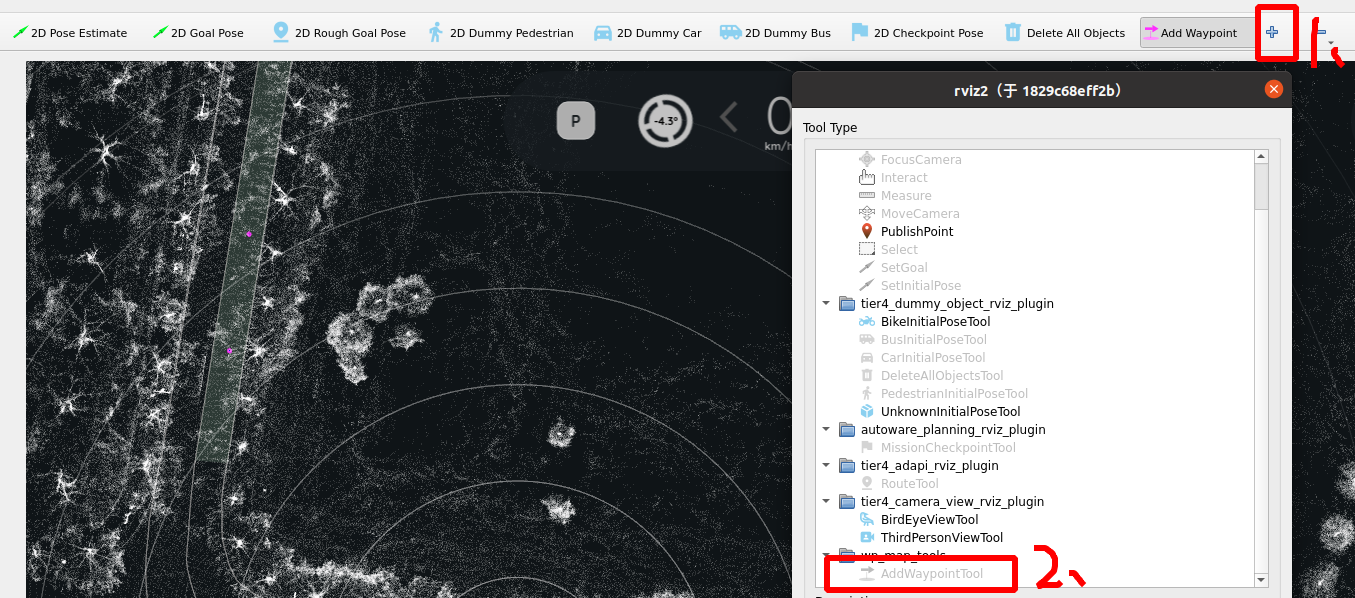
添加航点话题
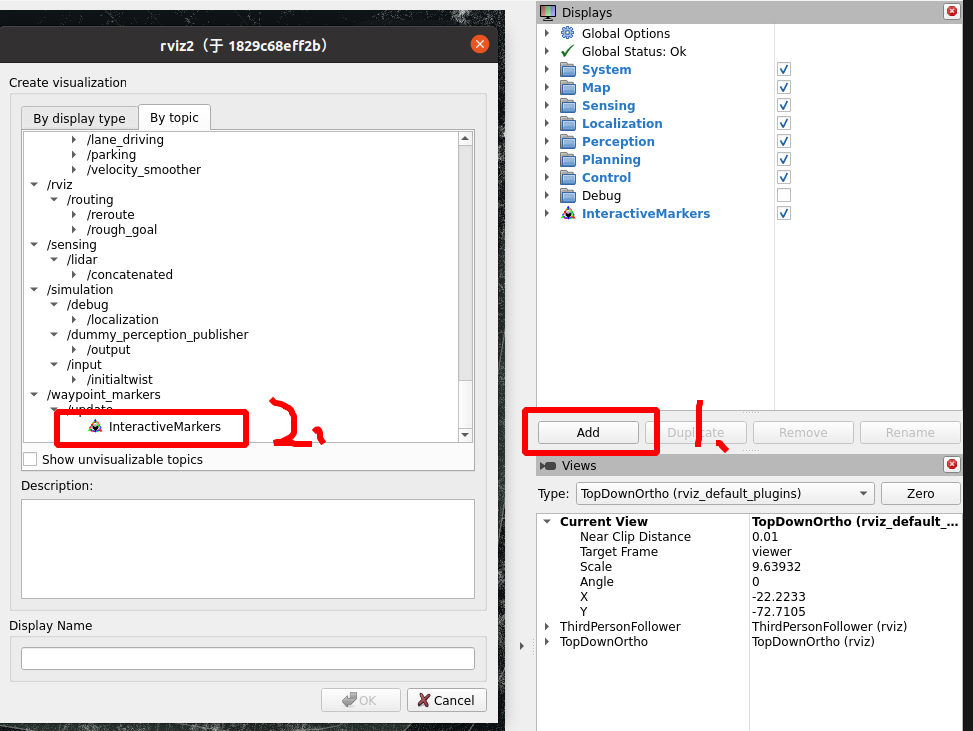
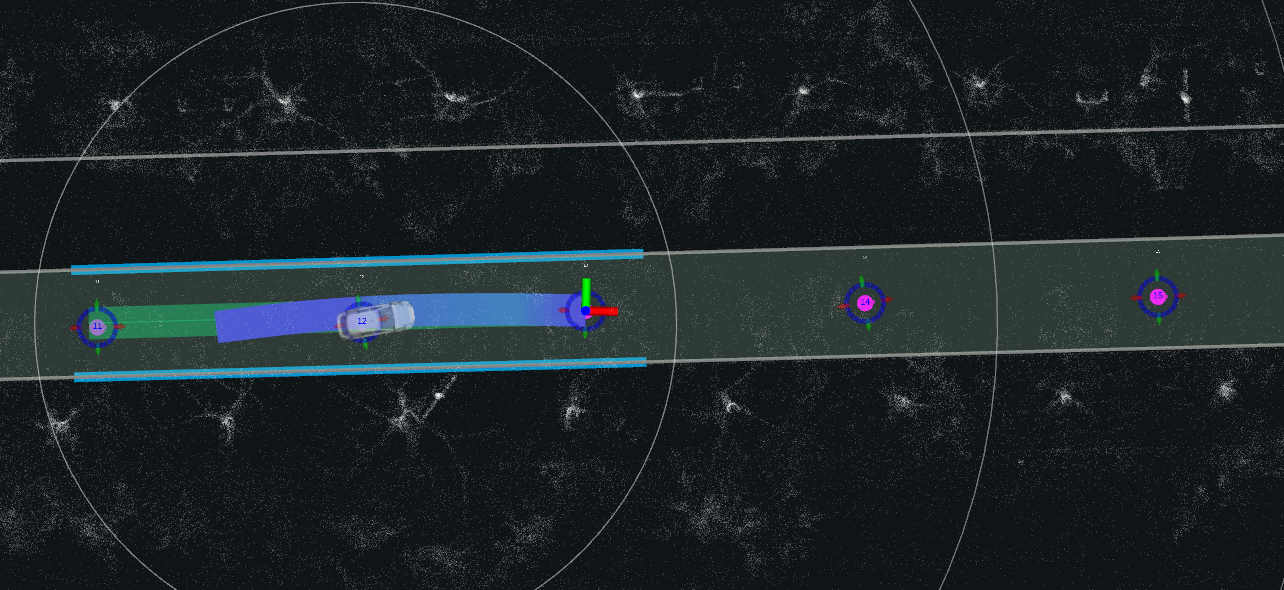
设置多航点,点击Auto,看车辆是否依次按照目标点行驶
存在问题
这里只是一个简单的demo程序,程序无法处理下面情况:
1.无法处理无法达到的目标点。可以在case 2里面进一步处理。
2.无法同步RVIZ删除的点。可以依赖/waypoint_markers/update这个topic去处理。
二、避障绕障
正常情况下,按照官方的配置一步步操作,车辆可以跟踪路径,但是不能不能避障(有障碍物的时候在RVIZ中没有obstacle_stop),说明感知模块出了问题。
可以尝试修改autoware_launch/launch/components/tier4_perception_component.launch.xml文件中的lidar_detection_model为clustering,或者替换为其他的方法尝试一下。
2.1调试过程
避障和绕障都在planning,不过首先确定感知模块能感知障碍物。
1.如果想绕障碍:default_preset.yaml中需要打开launch_dynamic_obstacle_avoidance
2.在静态配置文件和动态配置文件,同时打开unknown的识别,因为实际使用中大部分识别结果都是unknown
3.静态避障中hysteresis_factor_expand_rate参数似乎对能否成功绕开障碍物很重要。
下面给出几个配置文件的具体配置:
autoware_launch/config/planning/preset/default_preset.yaml
launch:- arg:name: behavior_path_planner_typedefault: behavior_path_planner# option: behavior_path_planner# path_generator# behavior path modules- arg:name: launch_static_obstacle_avoidancedefault: "true"- arg:name: launch_avoidance_by_lane_change_moduledefault: "true"- arg:name: launch_dynamic_obstacle_avoidancedefault: "true"- arg:name: launch_sampling_planner_moduledefault: "false" # Warning, experimental module, use only in simulations- arg:name: launch_lane_change_right_moduledefault: "true"- arg:name: launch_lane_change_left_moduledefault: "true"- arg:name: launch_external_request_lane_change_right_moduledefault: "false"- arg:name: launch_external_request_lane_change_left_moduledefault: "false"- arg:name: launch_goal_planner_moduledefault: "true"- arg:name: launch_start_planner_moduledefault: "true"- arg:name: launch_side_shift_moduledefault: "true"# behavior velocity modules- arg:name: launch_crosswalk_moduledefault: "true"- arg:name: launch_walkway_moduledefault: "true"- arg:name: launch_traffic_light_moduledefault: "true"- arg:name: launch_intersection_moduledefault: "true"- arg:name: launch_merge_from_private_moduledefault: "false"- arg:name: launch_blind_spot_moduledefault: "true"- arg:name: launch_detection_area_moduledefault: "true"- arg:name: launch_virtual_traffic_light_moduledefault: "true"- arg:name: launch_no_stopping_area_moduledefault: "true"- arg:name: launch_stop_line_moduledefault: "true"- arg:name: launch_occlusion_spot_moduledefault: "false"- arg:name: launch_run_out_moduledefault: "true"- arg:name: launch_speed_bump_moduledefault: "false"- arg:name: launch_no_drivable_lane_moduledefault: "false"# motion planning modules- arg:name: motion_path_smoother_typedefault: elastic_band# option: elastic_band# none- arg:name: motion_path_planner_typedefault: path_optimizer# option: path_optimizer# path_sampler# none# motion velocity planner modules- arg:name: launch_obstacle_stop_moduledefault: "false" # 第一处修改- arg:name: launch_obstacle_slow_down_moduledefault: "true"- arg:name: launch_obstacle_cruise_moduledefault: "true"- arg:name: launch_dynamic_obstacle_stop_moduledefault: "false" # 第二处修改- arg:name: launch_out_of_lane_moduledefault: "true"- arg:name: launch_obstacle_velocity_limiter_moduledefault: "true"- arg:name: launch_mvp_run_out_moduledefault: "false"- arg:name: motion_stop_planner_typedefault: obstacle_cruise_planner# option: obstacle_stop_planner# obstacle_cruise_planner# none- arg:name: velocity_smoother_typedefault: JerkFiltered# option: JerkFiltered# L2# Linf(Unstable)# Analytical- arg:name: launch_surround_obstacle_checkerdefault: "false"# parking modules- arg:name: launch_parking_moduledefault: "true"
autoware_launch/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/autoware_behavior_path_dynamic_obstacle_avoidance_module/dynamic_obstacle_avoidance.param.yaml
/**:ros__parameters:dynamic_avoidance:common:enable_debug_info: falseuse_hatched_road_markings: true# avoidance is performed for the object type with truetarget_object:car: truetruck: truebus: truetrailer: trueunknown: true # false -> truebicycle: truemotorcycle: truepedestrian: truemax_obstacle_vel: 100.0 # [m/s]min_obstacle_vel: 0.0 # [m/s]successive_num_to_entry_dynamic_avoidance_condition: 1 # 5 -> 1successive_num_to_exit_dynamic_avoidance_condition: 1min_obj_lat_offset_to_ego_path: 0.0 # [m]max_obj_lat_offset_to_ego_path: 1.0 # [m]cut_in_object:min_time_to_start_cut_in: 1.0 # [s]min_lon_offset_ego_to_object: 0.0 # [m]min_object_vel: 0.5 # [m/s]cut_out_object:max_time_from_outside_ego_path: 2.0 # [s]min_object_lat_vel: 0.3 # [m/s]min_object_vel: 0.5 # [m/s]crossing_object:min_overtaking_object_vel: 1.0max_overtaking_object_angle: 1.05min_oncoming_object_vel: 1.0max_oncoming_object_angle: 0.523max_pedestrian_crossing_vel: 0.8front_object:max_object_angle: 0.785min_object_vel: -0.5 # [m/s] The value is negative considering the noisy velocity of the stopped vehicle.max_ego_path_lat_cover_ratio: 0.3 # [-] The object will be ignored if the ratio of the object covering the ego's path is higher than this value.stopped_object:max_object_vel: 0.5 # [m/s] The object will be determined as stopped if the velocity is smaller than this value.drivable_area_generation:expand_drivable_area: truepolygon_generation_method: "ego_path_base" # choose "ego_path_base" and "object_path_base"object_path_base:min_longitudinal_polygon_margin: 3.0 # [m]lat_offset_from_obstacle: 0.3 # [m]margin_distance_around_pedestrian: 0.65 # [m]predicted_path:end_time_to_consider: 1.0 # [s]threshold_confidence: 0.0 # [] not probabilitymax_lat_offset_to_avoid: 0.5 # [m]max_time_for_object_lat_shift: 0.0 # [s]lpf_gain_for_lat_avoid_to_offset: 0.9 # [-]max_ego_lat_acc: 0.3 # [m/ss]max_ego_lat_jerk: 0.3 # [m/sss]delay_time_ego_shift: 1.0 # [s]# for same directional objectovertaking_object:max_time_to_collision: 40.0 # [s]start_duration_to_avoid: 1.0 # [s]end_duration_to_avoid: 1.0 # [s]duration_to_hold_avoidance: 3.0 # [s]# for opposite directional objectoncoming_object:max_time_to_collision: 40.0 # [s] This value should be the same as overtaking_object's one to suppress chattering of this value for parked vehiclesstart_duration_to_avoid: 1.0 # [s]end_duration_to_avoid: 0.0 # [s]autoware_launch/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/autoware_behavior_path_static_obstacle_avoidance_module/static_obstacle_avoidance.param.yaml
# see AvoidanceParameters description in avoidance_module_data.hpp for description.
/**:ros__parameters:avoidance:resample_interval_for_planning: 0.5 # [m] FOR DEVELOPERresample_interval_for_output: 6.0 # [m] FOR DEVELOPER# drivable lane setting. this module is able to use not only current lane but also right/left lane# if the current lane(=lanelet::Lanelet) and the right/left lane share the boundary(=lanelet::Linestring) in HDMap.# "current_lane" : use only current lane. this module doesn't use adjacent lane to avoid object.# "same_direction_lane" : this module uses same direction lane to avoid object if need.# "opposite_direction_lane": this module uses both same direction and opposite direction lane.use_lane_type: "opposite_direction_lane"# drivable area settinguse_intersection_areas: trueuse_hatched_road_markings: trueuse_freespace_areas: true# avoidance is performed for the object type with truetarget_object:car:th_moving_speed: 1.0 # [m/s]th_moving_time: 2.0 # [s]longitudinal_margin: 0.0 # [m]lateral_margin:soft_margin: 0.5 # [m]hard_margin: 0.2 # [m]hard_margin_for_parked_vehicle: 0.2 # [m]max_expand_ratio: 0.0 # [-] FOR DEVELOPERenvelope_buffer_margin: 0.1 # [m] FOR DEVELOPERth_error_eclipse_long_radius : 0.6 # [m]truck:th_moving_speed: 1.0th_moving_time: 2.0longitudinal_margin: 0.0lateral_margin:soft_margin: 0.5hard_margin: 0.2hard_margin_for_parked_vehicle: 0.2max_expand_ratio: 0.0envelope_buffer_margin: 0.1th_error_eclipse_long_radius : 0.6bus:th_moving_speed: 1.0th_moving_time: 2.0longitudinal_margin: 0.0lateral_margin:soft_margin: 0.5hard_margin: 0.2hard_margin_for_parked_vehicle: 0.2max_expand_ratio: 0.0envelope_buffer_margin: 0.1th_error_eclipse_long_radius : 0.6trailer:th_moving_speed: 1.0th_moving_time: 2.0longitudinal_margin: 0.0lateral_margin:soft_margin: 0.5hard_margin: 0.2hard_margin_for_parked_vehicle: 0.2max_expand_ratio: 0.0envelope_buffer_margin: 0.1th_error_eclipse_long_radius : 0.6unknown:th_moving_speed: 0.50 # 0.28 -> 0.50th_moving_time: 1.0longitudinal_margin: 0.0lateral_margin:soft_margin: 0.5hard_margin: 0.4 # -0.2 -> 0.4hard_margin_for_parked_vehicle: 0.2 # -0.2 -> 0.2max_expand_ratio: 0.0envelope_buffer_margin: 0.5 # 0.1 -> 0.5th_error_eclipse_long_radius : 0.6bicycle:th_moving_speed: 0.28th_moving_time: 1.0longitudinal_margin: 0.6lateral_margin:soft_margin: 0.7hard_margin: 0.5hard_margin_for_parked_vehicle: 0.2max_expand_ratio: 0.0envelope_buffer_margin: 0.5th_error_eclipse_long_radius : 0.6motorcycle:th_moving_speed: 1.0th_moving_time: 1.0longitudinal_margin: 0.6lateral_margin:soft_margin: 0.5hard_margin: 0.3hard_margin_for_parked_vehicle: 0.2max_expand_ratio: 0.0envelope_buffer_margin: 0.5th_error_eclipse_long_radius : 0.6pedestrian:th_moving_speed: 0.28th_moving_time: 1.0longitudinal_margin: 0.6lateral_margin:soft_margin: 0.7hard_margin: 0.5hard_margin_for_parked_vehicle: 0.2max_expand_ratio: 0.5 # 0.0 -> 0.5envelope_buffer_margin: 0.5th_error_eclipse_long_radius : 0.6lower_distance_for_polygon_expansion: 30.0 # [m] FOR DEVELOPERupper_distance_for_polygon_expansion: 100.0 # [m] FOR DEVELOPER# For target object filteringtarget_filtering:# avoidance target typetarget_type:car: true # [-]truck: true # [-]bus: true # [-]trailer: true # [-]unknown: true # [-]bicycle: true # [-]motorcycle: true # [-]pedestrian: true # [-]# detection rangeobject_check_goal_distance: 20.0 # [m]object_check_return_pose_distance: 20.0 # [m]# lost object compensationmax_compensation_time: 2.0# detection area generation parametersdetection_area:static: false # [-]min_forward_distance: 50.0 # [m]max_forward_distance: 150.0 # [m]backward_distance: 10.0 # [m]# filtering parking objectsparked_vehicle:th_offset_from_centerline: 1.0 # [m]th_shiftable_ratio: 0.8 # [-]min_road_shoulder_width: 0.5 # [m] FOR DEVELOPER# for merging/deviating vehiclemerging_vehicle:th_overhang_distance: 0.0 # [m]# params for avoidance of vehicle type objects that are ambiguous as to whether they are parked.avoidance_for_ambiguous_vehicle:# policy for ego behavior for ambiguous vehicle.# "auto" : generate candidate path. if RTC is running as AUTO mode, the ego avoids it automatically.# "manual" : generate candidate path and wait operator approval even if RTC is running as AUTO mode.# "ignore" : never avoid it.policy: "manual" # [-]condition:th_stopped_time: 3.0 # [s]th_moving_distance: 1.0 # [m]ignore_area:traffic_light:front_distance: 20.0 # [m]crosswalk:front_distance: 20.0 # [m]behind_distance: 0.0 # [m]wait_and_see:target_behaviors: ["MERGING", "DEVIATING"] # [-]th_closest_distance: 10.0 # [m]# params for filtering objects that are in intersectionintersection:yaw_deviation: 0.349 # [rad] (default 20.0deg)freespace:condition:th_stopped_time: 5.0 # [-]# For safety checksafety_check:# safety check target typetarget_type:car: true # [-]truck: true # [-]bus: true # [-]trailer: true # [-]unknown: true # [-] # false -> truebicycle: true # [-]motorcycle: true # [-]pedestrian: true # [-]# safety check configurationenable: true # [-]check_current_lane: true # [-] # false -> truecheck_shift_side_lane: true # [-]check_other_side_lane: false # [-]check_unavoidable_object: true # [-] # false -> truecheck_other_object: true # [-]# collision check parameterscheck_all_predicted_path: true # [-] # false -> truesafety_check_backward_distance: 100.0 # [m]hysteresis_factor_expand_rate: 1.675 # [-]hysteresis_factor_safe_count: 3 # [-]collision_check_yaw_diff_threshold: 3.1416 # [rad]# predicted path parametersmin_velocity: 1.38 # [m/s]max_velocity: 50.0 # [m/s]time_resolution: 0.5 # [s]time_horizon_for_front_object: 3.0 # [s]time_horizon_for_rear_object: 10.0 # [s]delay_until_departure: 0.0 # [s]# rss parametersextended_polygon_policy: "along_path" # [-] select "rectangle" or "along_path"expected_front_deceleration: -1.0 # [m/ss]expected_rear_deceleration: -1.0 # [m/ss]rear_vehicle_reaction_time: 2.0 # [s]rear_vehicle_safety_time_margin: 1.0 # [s]lateral_distance_max_threshold: 2.0 # [m]longitudinal_distance_min_threshold: 3.0 # [m]longitudinal_velocity_delta_time: 0.0 # [s]# For avoidance maneuveravoidance:# avoidance lateral parameterslateral:th_avoid_execution: 0.09 # [m] FOR DEVELOPERth_small_shift_length: 0.101 # [m] FOR DEVELOPERsoft_drivable_bound_margin: 0.3 # [m]hard_drivable_bound_margin: 0.3 # [m]max_right_shift_length: 5.0 # [m] FOR DEVELOPERmax_left_shift_length: 5.0 # [m] FOR DEVELOPERmax_deviation_from_lane: 0.2 # [m]# approve the next shift line after reaching this percentage of the current shift line length.# this parameter is added to allow waiting for the return of shift approval until the occlusion behind the avoid target is clear.# this feature can be disabled by setting this parameter to 0.0.ratio_for_return_shift_approval: 0.5 # [-]# avoidance distance parameterslongitudinal:min_prepare_time: 1.0 # [s]max_prepare_time: 2.0 # [s]min_prepare_distance: 1.0 # [m]min_slow_down_speed: 1.38 # [m/s]buf_slow_down_speed: 0.56 # [m/s] FOR DEVELOPERnominal_avoidance_speed: 8.33 # [m/s] FOR DEVELOPERconsider_front_overhang: true # [-]consider_rear_overhang: true # [-]# return dead linereturn_dead_line:goal:enable: true # [-]buffer: 3.0 # [m]traffic_light:enable: true # [-]buffer: 3.0 # [m]# For cancel maneuvercancel:enable: true # [-]force:duration_time: 2.0 # [s]# For yield maneuveryield:enable: true # [-]enable_during_shifting: false # [-]# For stop maneuverstop:max_distance: 20.0 # [m]stop_buffer: 1.0 # [m] FOR DEVELOPERpolicy:# policy for module behavior. select "reliable" or "not_enough".# "reliable": this module fully trusts the perception results and makes all decisions automatically.# "not_enough": because the perception results are not fully reliable, the system waits for the operator's judgment in situations where long-range perception is required.detection_reliability: "reliable"# policy for rtc request. select "per_shift_line" or "per_avoidance_maneuver".# "per_shift_line": request approval for each shift line.# "per_avoidance_maneuver": request approval for avoidance maneuver (avoid + return).make_approval_request: "per_shift_line"# policy for vehicle slow down behavior. select "best_effort" or "reliable".# "best_effort": slow down deceleration & jerk are limited by constraints.# but there is a possibility that the vehicle can't stop in front of the vehicle.# "reliable": insert stop or slow down point with ignoring decel/jerk constraints.# make it possible to increase chance to avoid but uncomfortable deceleration maybe happen.deceleration: "best_effort" # [-]# policy for avoidance lateral margin. select "best_effort" or "reliable".# "best_effort": output avoidance path with shorten lateral margin when there is no enough longitudinal# margin to avoid.# "reliable": module output avoidance path with safe (rtc cooperate) state only when the vehicle can avoid# with expected lateral margin.lateral_margin: "best_effort" # [-]# if true, module doesn't wait deceleration and outputs avoidance path by best effort margin.use_shorten_margin_immediately: true # [-]# --------------------------------------# FOLLOWING PARAMETERS ARE FOR DEVELOPER# --------------------------------------constraints:# lateral constraintslateral:velocity: [1.39, 4.17, 11.1] # [m/s]max_accel_values: [0.5, 0.5, 0.5] # [m/ss]min_jerk_values: [0.2, 0.2, 0.2] # [m/sss]max_jerk_values: [3.0, 3.0, 3.0] # [m/sss]# longitudinal constraintslongitudinal:nominal_deceleration: -1.0 # [m/ss]nominal_jerk: 0.5 # [m/sss]max_deceleration: -1.5 # [m/ss]max_jerk: 1.0 # [m/sss]max_acceleration: 0.5 # [m/ss]min_velocity_to_limit_max_acceleration: 2.78 # [m/ss]# path generation method. select "shift_line_base" or "optimization_base" or "both".# "shift_line_base" : Create avoidance path based on shift line.# User can control avoidance maneuver execution via RTC.# However, this method doesn't support complex avoidance scenario (e.g. S-shape maneuver).# "optimization_base": This module selects avoidance target object# and bpp module clips drivable area based on avoidance target object polygon shape.# But this module doesn't modify the path shape.# On the other hand, autoware_path_optimizer module optimizes path shape instead of this module# so that the path can be within drivable area. This method is able to deal with complex avoidance scenario.# However, user can't control avoidance manuever execution.# "both" : Use both method.path_generation_method: "shift_line_base"shift_line_pipeline:trim:quantize_size: 0.1th_similar_grad_1: 0.1th_similar_grad_2: 0.2th_similar_grad_3: 0.5# for debugdebug:enable_other_objects_marker: trueenable_other_objects_info: trueenable_detection_area_marker: falseenable_drivable_bound_marker: falseenable_safety_check_marker: falseenable_shift_line_marker: falseenable_lane_marker: falseenable_misc_marker: false