PPO算法:从深度学习视角入门强化学习
文章目录
- 1. 强化学习:不只是“监督学习”
- 2. PPO的“学前班”:必备基础概念
- 2.1 马尔可夫决策过程
- 2.2 折扣因子
- 2.3 价值函数
- 2.4 策略梯度
- 3. PPO的核心:稳定与高效的“艺术”
- 3.1 Actor-Critic 架构
- 3.2 重要性采样
- 3.3 裁剪功能:PPO的“安全带”
- 3.4 KL散度
- 4. PPO核心公式一览
- 5. PPO代码实现思路
- 5.1 案例目标
- 5.2 案例内容
- 5.3 代码实现思路
1. 强化学习:不只是“监督学习”
- 在深度学习中,我们习惯于监督学习的范式:给模型一堆
(输入, 正确标签)对,模型通过最小化预测与标签之间的差距来学习。比如,给一张猫的图片,标签是“猫”。但强化学习完全不同。想象一下你在教一只小狗“坐下”:- 你不会直接告诉它“你的神经元权重应该这样调整”。
- 你只会给它一个指令(比如“坐下”),然后观察它的动作。
- 如果它做对了,你就给它一个零食(奖励);如果做错了,你可能什么也不给,或者说“不”(负奖励)。
- 经过多次尝试,小狗会自己学会哪些动作(在什么状态下)能获得最多的零食。
这就是强化学习的核心思想。我们来定义几个基本术语:
- 智能体:就是你的小狗,或者我们代码里的模型。它负责做决策。
- 环境:小狗所处的世界,包括你和它自己。环境会根据智能体的动作,给出新的状态和奖励。
- 状态:对当前环境的描述。比如,“你站着,小狗也站着”。
- 动作:智能体可以执行的操作。比如,“小狗坐下”。
- 奖励:环境对智能体动作的即时反馈。比如,“+1(一个零食)”或“0(没有零食)”。
RL的目标:训练一个智能体,让它学会一个策略,这个策略能在任何状态下,选择能最大化长期累积奖励的动作。
与深度学习的连接:在深度学习中,我们用神经网络来拟合一个从输入到标签的函数
f(x) -> y。在强化学习中,我们同样用神经网络,但目标是拟合一个策略函数π(a|s),它输入一个状态s,输出一个概率分布,表示在当前状态下执行每个动作a的概率。
2. PPO的“学前班”:必备基础概念
在深入PPO之前,我们需要先理解几个它赖以构建的基石。
2.1 马尔可夫决策过程
- 这个名字听起来吓人,但思想很简单:“未来只取决于现在,与过去无关”。
就像下棋,你下一步该怎么走,只取决于当前棋盘的局面(当前状态),而与你之前是怎么走到这个局面的(历史动作序列)无关。MDP就是对这个“无记忆”过程的数学描述。它确保了我们只需要关注当前状态S_t来做决策,大大简化了问题。
2.2 折扣因子
-
我们希望最大化“长期累积奖励”,但这个“长期”是多久?而且,未来的奖励不如眼前的奖励“值钱”。今天的100块比明天的100块更有吸引力。
-
折扣因子
γ(gamma) 就是用来衡量这个概念的。它是一个介于0和1之间的数。我们计算的不是所有未来奖励的简单相加,而是折扣累积奖励:
Gt=Rt+γ∗Rt+1+γ2∗Rt+2+...G_t = R_t + γ * R_{t+1} + γ² * R_{t+2} + ...Gt=Rt+γ∗Rt+1+γ2∗Rt+2+...- 如果
γ接近0,智能体会非常“短视”,只关心眼前的奖励。 - 如果
γ接近1,智能体会非常有“远见”,愿意为了长远的巨大回报而牺牲眼前的利益。
- 如果
2.3 价值函数
如何评估一个状态或一个动作的“好坏”?价值函数就是答案。
- 状态价值函数 V(s):从状态
s出发,遵循某个策略,未来能获得的期望折扣累积奖励。它回答了:“当前这个局面有多好?” - 动作价值函数 Q(s, a):在状态
s下,执行动作a,然后遵循某个策略,未来能获得的期望折扣累积奖励。它回答了:“在当前局面下,这么做有多好?”
与深度学习的连接:V(s) 和 Q(s, a) 都可以用神经网络来拟合。想象一下,你训练一个网络,输入一张游戏截图(状态
s),输出一个分数(V(s)),这个分数预测了你最终能得多少分。这就是价值网络。
2.4 策略梯度
-
这是连接深度学习和强化学习的关键桥梁。我们有一个策略网络
π_θ(θ是网络参数),我们想调整θ来让智能体表现更好。但问题来了:我们没有“正确动作”的标签,怎么计算梯度呢? -
策略梯度的思想非常巧妙:如果一个动作带来了比预期更好的结果,我们就应该增加它在未来被选择的概率;反之,则降低其概率。 其核心梯度公式可以简化理解为:∇θJ(θ)≈E[(Q(s,a)−V(s))∗∇θlogπθ(a∣s)]∇_θ J(θ) ≈ E[ (Q(s, a) - V(s)) * ∇_θ log π_θ(a|s) ]∇θJ(θ)≈E[(Q(s,a)−V(s))∗∇θlogπθ(a∣s)]
Q(s, a) - V(s)被称为优势函数A(s, a)。它表示动作a比在状态s下的“平均表现”好多少或差多少。
- 如果
A(s, a) > 0(动作比平均好),梯度方向就和∇_θ log π_θ(a|s)一致,增加这个动作的概率。 - 如果
A(s, a) < 0(动作比平均差),梯度方向就和∇_θ log π_θ(a|s)相反,降低这个动作的概率。
-
这样,我们就有了更新策略网络的“方向”!
3. PPO的核心:稳定与高效的“艺术”
- 传统的策略梯度方法有一个大问题:数据利用率低。每次更新策略后,旧策略产生的数据就不能再用了,必须用新策略重新收集数据。这太浪费了!
- PPO就是为了解决这个问题而生的,它的全称是Proximal Policy Optimization(近端策略优化),核心思想是:用旧策略的数据来更新新策略,但要小心,别让新策略“走得太远”。
3.1 Actor-Critic 架构
PPO通常采用Actor-Critic架构,这就像一个剧组:
- Actor(演员):就是我们的策略网络 πθπ_θπθ。它负责在给定状态下“表演”,即选择一个动作。
- Critic(评论家):就是我们的价值网络 VφV_φVφ。它负责观看Actor的表演,并给出评价,即计算状态价值 V(s)V(s)V(s) 或优势
A(s, a)。
Actor根据Critic的评价来调整自己的“演技”(更新策略参数),而Critic也在不断学习如何更准确地评价(更新价值参数)。两者相互促进,共同进步。
3.2 重要性采样
- n这是PPO能够“复用数据”的魔法。我们想用旧策略 πθoldπ_{θ_{old}}πθold 收集的数据 (s,a,r)(s,a,r)(s,a,r) 来更新新策略 πθπ_θπθ。
- 直接用旧数据计算新策略的梯度会有偏差,因为数据分布不同。重要性采样提供了一个修正系数:重要性权重=πθ(a∣s)πθold(a∣s)\text{重要性权重} = \frac{\pi_\theta(a|s)}{\pi_{\theta_{\text{old}}}(a|s)}重要性权重=πθold(a∣s)πθ(a∣s)
这个权重衡量了新旧策略在同一个状态s下,选择同一个动作a的概率变化。通过这个权重,我们就可以“校正”旧数据,使其适用于新策略的更新。
3.3 裁剪功能:PPO的“安全带”
- 重要性采样虽然强大,但有一个致命风险:如果新旧策略差异太大,这个权重会变得极不稳定,可能导致训练崩溃。
- PPO的精髓就在于裁剪。它给重要性权重加了一个“限制器”,确保新策略不会偏离旧策略太远。
- PPO的目标函数(简化版)如下:
LCLIP(θ)=Et[min(rt(θ)At,clip(rt(θ),1−ϵ,1+ϵ)At)]L^{\text{CLIP}}(\theta) = \mathbb{E}_t \left[ \min\left( r_t(\theta) A_t, \ \text{clip}\left(r_t(\theta), 1-\epsilon, 1+\epsilon\right) A_t \right) \right]LCLIP(θ)=Et[min(rt(θ)At, clip(rt(θ),1−ϵ,1+ϵ)At)]r_t(θ)就是重要性权重π_θ(a|s) / π_θ_old(a|s),ε是一个很小的超参数(如0.2),A_t是优势函数。
这个公式看起来复杂,但思想很直观:
- 当优势 At>0A_t > 0At>0(好动作):
- 我们希望增加这个动作的概率,即希望
r_t(θ)变大。 - 但
min函数限制了它。如果r_t(θ)超过了1+ε,clip函数会把它“裁剪”到1+ε。此时,min会选择被裁剪后的值,这意味着目标函数不会再增加了,梯度也消失了。 - 效果:对于好动作,我们允许其概率增加,但最多只能增加到旧策略的
1+ε倍,防止步子迈得太大。
- 我们希望增加这个动作的概率,即希望
- 当优势 At<0A_t < 0At<0(坏动作):
- 我们希望降低这个动作的概率,即希望
r_t(θ)变小。 min函数同样会限制它。如果r_t(θ)小于1-ε,clip会把它裁剪到1-ε。此时,min会选择未被裁剪的、更小的r_t(θ) * A_t(因为A_t是负数,乘以更小的r_t会得到更大的值,即更小的损失)。- 效果:对于坏动作,我们允许其概率降低,但最多只能降低到旧策略的
1-ε倍。
- 我们希望降低这个动作的概率,即希望
这个小小的 min 和 clip 组合,就像一个安全带,让策略更新既有效又稳定,是PPO算法成功的核心。
3.4 KL散度
- KL散度是衡量两个概率分布“差异”的指标。在PPO的一些变体中,它被用作另一种“安全带”。比如,可以设定一个目标,让新旧策略的KL散度不能超过某个阈值。如果超过了,就停止更新或施加惩罚。裁剪目标函数实际上是一种隐式地约束KL散度的方法。
4. PPO核心公式一览
现在,我们把所有部分拼起来。PPO的最终损失函数通常是三部分的加权和:
L(θ)=E[LCLIP(θ)−c1∗LVF(θ)+c2∗S[πθ](s)]L(θ) = E[ L_{CLIP}(θ) - c1 * L_{VF}(θ) + c2 * S[π_θ](s) ]L(θ)=E[LCLIP(θ)−c1∗LVF(θ)+c2∗S[πθ](s)]
- LCLIP(θ)L_{CLIP}(θ)LCLIP(θ):就是我们上面详细讲的裁剪策略目标,用于更新Actor。
- LVF(θ)L_{VF}(θ)LVF(θ):价值函数损失。通常是均方误差
MSE(V_φ(s), G_t),用于更新Critic,让它对价值的估计更准。G_t是实际的折扣累积回报。 - S[πθ](s)S[π_θ](s)S[πθ](s):熵奖励。熵衡量了策略的“随机性”。鼓励熵可以防止策略过早地收敛到一个确定性策略(比如在某个状态下永远只选一个动作),从而保持探索能力。这在训练初期尤其重要。
c1 和 c2 是平衡这三项的超参数。
5. PPO代码实现思路
- 纸上得来终觉浅,绝知此事要躬行。在理解了PPO的理论之后,让我们通过一个经典的案例——CartPole(倒立摆)——来亲手实现PPO算法。这个案例将把前面所有的抽象概念都具体化。
5.1 案例目标
我们的目标是训练一个智能体,让它学会控制一个小车上的杆子,使其保持竖直平衡。
- 环境:
CartPole-v1,一个由OpenAI Gymnasium提供的标准测试环境。 - 状态:智能体能观察到4个维度的信息:
- 小车的位置
- 小车的速度
- 杆子的角度
- 杆子的角速度
- 动作:智能体可以执行2个离散动作:
- 向左施力
- 向右施力
- 奖励:每成功保持杆子平衡一步,智能体获得+1的奖励。如果杆子倒下或小车移出边界,则回合结束。
- 成功标准:杆子在连续500步内不倒下,即认为任务解决。
5.2 案例内容
我们将使用PyTorch构建两个核心神经网络:
- Actor(策略网络):输入当前状态(4个维度),输出执行每个动作的概率(2个概率值之和为1)。它负责做决策。
- Critic(价值网络):输入当前状态(4个维度),输出一个标量,表示对该状态未来能获得总奖励的估计。它负责评估Actor决策的好坏。
训练过程将遵循我们之前讨论的PPO流程:与环境交互收集数据 -> 计算优势函数 -> 使用裁剪的目标函数更新Actor和Critic网络。
5.3 代码实现思路
代码分为以下几个部分:
- 网络定义:创建
Actor和Critic两个PyTorch模型类。 - PPO算法类:创建一个
PPO类,封装所有核心逻辑,包括:- 初始化网络和优化器。
update方法:接收一个回合的数据,执行PPO的核心更新逻辑(计算裁剪损失、价值损失、熵奖励,并更新网络)。train方法:主训练循环,负责与环境交互、收集数据,并定期调用update方法。
- 主程序:实例化环境和PPO智能体,并启动训练。
下面是带有详细注释的完整代码实现。
# 导入所需的库
import gymnasium as gym
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
from IPython.display import clear_output
# 注意:某些版本的gymnasium可能与新版numpy不兼容,如遇问题可尝试固定numpy版本
# pip uninstall numpy
# pip install numpy==1.24.3
# --- 1. 网络定义 ---
# 策略网络:用于决定在给定状态下采取什么动作
class Actor(nn.Module):def __init__(self, state_dim, action_dim):super(Actor, self).__init__()# 构建一个简单的三层全连接神经网络self.network = nn.Sequential(nn.Linear(state_dim, 64), # 输入层 -> 隐藏层1nn.Tanh(), # 激活函数,增加非线性nn.Linear(64, 64), # 隐藏层1 -> 隐藏层2nn.Tanh(), # 激活函数nn.Linear(64, action_dim), # 隐藏层2 -> 输出层nn.Softmax(dim=-1) # 将输出转换为概率分布,确保所有动作概率和为1)def forward(self, state):return self.network(state) # 前向传播,输出动作概率分布# 价值网络:用于评估状态的价值
class Critic(nn.Module):def __init__(self, state_dim):super(Critic, self).__init__()# 构建一个简单的三层全连接神经网络self.network = nn.Sequential(nn.Linear(state_dim, 64), # 输入层 -> 隐藏层1nn.Tanh(), # 激活函数nn.Linear(64, 64), # 隐藏层1 -> 隐藏层2nn.Tanh(), # 激活函数nn.Linear(64, 1) # 隐藏层2 -> 输出层(输出一个标量,即状态价值V(s)))def forward(self, state):return self.network(state) # 前向传播,输出状态价值# --- 2. PPO算法实现 ---
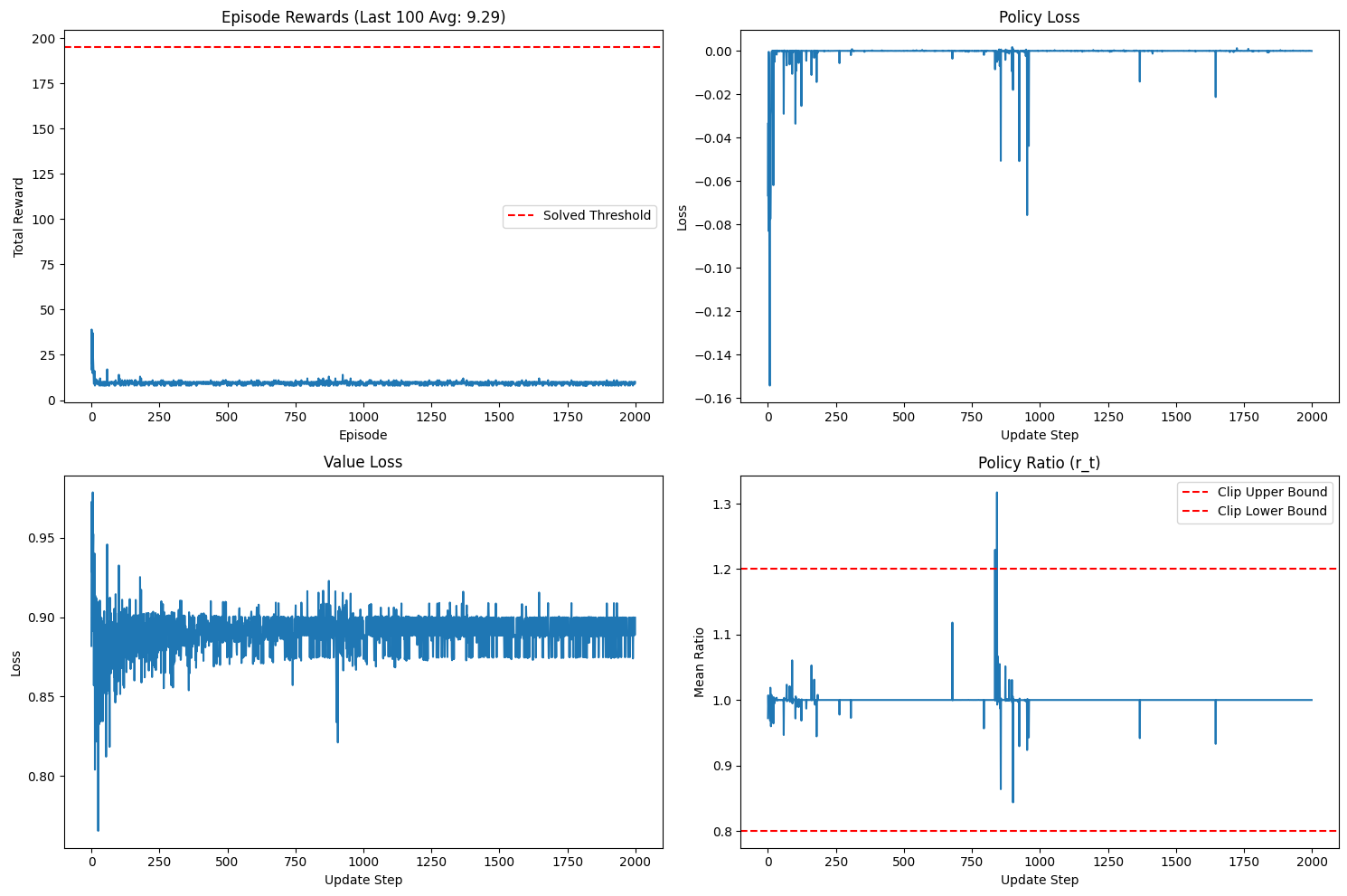
class PPO:def __init__(self, state_dim, action_dim, lr=0.0003, gamma=0.99, epsilon=0.2, c1=0.5, c2=0.01):"""初始化PPO智能体Args:state_dim (int): 状态空间的维度 (CartPole中为4)action_dim (int): 动作空间的维度 (CartPole中为2)lr (float): 学习率gamma (float): 折扣因子,用于计算未来奖励epsilon (float): PPO裁剪范围,限制策略更新的幅度c1 (float): 价值函数损失的权重系数c2 (float): 熵奖励的权重系数"""# 初始化策略网络和价值网络self.actor = Actor(state_dim, action_dim)self.critic = Critic(state_dim)# 为Actor和Critic分别创建Adam优化器self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=lr)self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=lr)# 设置PPO算法的超参数self.gamma = gamma # 折扣因子self.epsilon = epsilon # 裁剪参数self.c1 = c1 # 价值损失系数self.c2 = c2 # 熵奖励系数# 用于存储一个回合中收集到的数据self.memory = {'states': [], # 存储所有经历的状态'actions': [], # 存储所有执行的动作'old_log_probs': [], # 存储动作的原始概率'rewards': [], # 存储获得的奖励'dones': [] # 存储是否结束的标志}# 记录训练过程中的指标,用于可视化self.rewards_history = [] # 记录每个episode的总奖励self.policy_losses = [] # 记录策略网络的损失self.value_losses = [] # 记录价值网络的损失self.ratios = [] # 记录策略更新的比率def store_transition(self, state, action, reward, done, old_log_prob):"""将一步的交互数据存入内存"""self.memory['states'].append(state)self.memory['actions'].append(action)self.memory['old_log_probs'].append(old_log_prob)self.memory['rewards'].append(reward)self.memory['dones'].append(done)def compute_advantages(self, rewards, dones, values, next_values):"""计算GAE (Generalized Advantage Estimation) 或 简单的优势函数这里使用简化的TD-Error作为优势函数A(s,a) = R + γ * V(s') - V(s)"""advantages = rewards + self.gamma * next_values * (1 - dones) - values# 标准化优势函数,有助于训练稳定return (advantages - advantages.mean()) / (advantages.std() + 1e-8)def update(self):"""使用收集到的数据更新策略网络和价值网络"""# 将内存中的列表转换为PyTorch张量states = torch.stack(self.memory['states'])actions = torch.stack(self.memory['actions'])old_log_probs = torch.stack(self.memory['old_log_probs'])rewards = torch.FloatTensor(self.memory['rewards'])dones = torch.FloatTensor(self.memory['dones'])# --- 计算优势函数 ---with torch.no_grad(): # 在此块中不计算梯度values = self.critic(states).squeeze()# 使用价值网络(critic)评估每个状态的价值# 例如:states中有100个状态,每个状态得到一个价值估计# 获取下一个状态的价值# values[1:] 取除了第一个状态之外的所有状态的价值# torch.tensor([[0.0]]) 在最后补一个0(因为最后一个状态没有下一个状态)next_values = torch.cat([values[1:], torch.tensor([0.0])])# 计算优势函数:Q(s,a) - V(s)advantages = self.compute_advantages(rewards, dones, values, next_values)returns = advantages + values # 计算回报 G_t = A_t + V(s)# 清空内存,为下一个回合的数据收集做准备for key in self.memory:self.memory[key].clear()# --- PPO核心更新循环 ---# 对同一批数据进行多次更新,提高数据利用率for _ in range(10): # 重新计算当前策略下的动作概率current_probs = self.actor(states)dist = torch.distributions.Categorical(current_probs)current_log_probs = dist.log_prob(actions)# 1. 计算重要性采样比率 r_t(θ)ratios = torch.exp(current_log_probs - old_log_probs)# 2. 计算裁剪的策略目标 L_CLIPsurr1 = ratios * advantagessurr2 = torch.clamp(ratios, 1 - self.epsilon, 1 + self.epsilon) * advantagespolicy_loss = -torch.min(surr1, surr2).mean()# 3. 计算价值函数损失 L_VFvalue_pred = self.critic(states).squeeze()value_loss = nn.functional.mse_loss(value_pred, returns)# 4. 计算熵奖励 S[π_θ](s)entropy = dist.entropy().mean()# 5. 计算总损失# L(θ) = L_CLIP - c1 * L_VF + c2 * S# 注意:我们是最小化损失,所以价值损失是加,熵奖励是减(因为我们要最大化熵)total_loss = policy_loss + self.c1 * value_loss - self.c2 * entropy# --- 更新网络 ---# 更新Actorself.actor_optimizer.zero_grad()policy_loss.backward(retain_graph=True) # 保留计算图,因为Critic还要用self.actor_optimizer.step()# 更新Criticself.critic_optimizer.zero_grad()value_loss.backward()self.critic_optimizer.step()# 记录本轮更新的指标self.ratios.append(ratios.mean().item())self.policy_losses.append(policy_loss.item())self.value_losses.append(value_loss.item())def plot_training_data(self, episode):"""可视化训练过程中的各项指标"""clear_output(wait=True)fig, axs = plt.subplots(2, 2, figsize=(15, 10))# 绘制每个回合的总奖励axs[0, 0].plot(self.rewards_history)axs[0, 0].set_title(f'Episode Rewards (Last 100 Avg: {np.mean(self.rewards_history[-100:]):.2f})')axs[0, 0].set_xlabel('Episode')axs[0, 0].set_ylabel('Total Reward')axs[0, 0].axhline(y=195, color='r', linestyle='--', label='Solved Threshold')axs[0, 0].legend()# 绘制策略损失axs[0, 1].plot(self.policy_losses)axs[0, 1].set_title('Policy Loss')axs[0, 1].set_xlabel('Update Step')axs[0, 1].set_ylabel('Loss')# 绘制价值损失axs[1, 0].plot(self.value_losses)axs[1, 0].set_title('Value Loss')axs[1, 0].set_xlabel('Update Step')axs[1, 0].set_ylabel('Loss')# 绘制策略比率axs[1, 1].plot(self.ratios)axs[1, 1].set_title('Policy Ratio (r_t)')axs[1, 1].set_xlabel('Update Step')axs[1, 1].set_ylabel('Mean Ratio')axs[1, 1].axhline(y=1+self.epsilon, color='r', linestyle='--', label='Clip Upper Bound')axs[1, 1].axhline(y=1-self.epsilon, color='r', linestyle='--', label='Clip Lower Bound')axs[1, 1].legend()plt.tight_layout()plt.show()def train(self, env, episodes=1000):"""主训练循环"""for episode in range(episodes):state, _ = env.reset()done = Falseepisode_reward = 0while not done:# 将状态转换为张量state_tensor = torch.FloatTensor(state)# Actor选择动作with torch.no_grad():probs = self.actor(state_tensor)dist = torch.distributions.Categorical(probs)action = dist.sample()log_prob = dist.log_prob(action)# 与环境交互next_state, reward, terminated, truncated, _ = env.step(action.item())done = terminated or truncated# 存储这一步的轨迹self.store_transition(state_tensor, action, reward, done, log_prob)state = next_stateepisode_reward += reward# 一个回合结束,使用收集到的数据更新网络self.update()self.rewards_history.append(episode_reward)# 定期打印和绘图if (episode + 1) % 100 == 0:avg_reward = np.mean(self.rewards_history[-100:])print(f"Episode {episode + 1}, Average Reward (last 100): {avg_reward:.2f}")self.plot_training_data(episode)# 检查是否已解决if avg_reward >= 195.0:print(f"Environment solved in {episode + 1} episodes!")break
# --- 3. 主程序 ---
if __name__ == "__main__":# 创建CartPole环境,render_mode="human"可以可视化,但会拖慢训练速度# 训练时可以设为 None 或 "rgb_array"env = gym.make('CartPole-v1', render_mode=None) # 获取状态和动作空间的维度state_dim = env.observation_space.shape[0]action_dim = env.action_space.n# 创建PPO智能体实例ppo_agent = PPO(state_dim, action_dim)# 开始训练ppo_agent.train(env, episodes=2000)# 关闭环境env.close()