《模仿人类皮肤层与环层小体的社交交互机器人皮肤》2024 IEEE/ASME TMECH 论文解读
目录
一、引言:为什么需要 “像人一样” 的机器人皮肤?
1. 社交触觉的重要性
2. 现有机器人皮肤的三大痛点
3. 作者的解决方案:仿生设计
二、核心:仿生结构与制作方法
1. 多层织物:模仿人类皮肤的 “表皮 + 真皮”
2. 封装麦克风节点(EMNs):模仿环层小体
3. 皮肤怎么造出来?
三、验证:这皮肤真的 “像人” 吗?
1. 验证 1:织物的力学性能 —— 摸起来像人的皮肤
2. 验证 2:刺激分散 —— 感受范围大,不用贴满 EMNs
3. 验证 3:EMNs 的灵敏度 —— 能测高频振动,像环层小体
4. 验证 4:鲁棒性 —— 坏几个 EMNs 也能用
四、算法:机器人怎么 “读懂” 触觉?
1. 触摸定位:用被动声学层析成像(PAT)
2. 触摸分类:用 CNN 识别 “触摸方式”
(1)提取特征:把信号变成 “图片”
(2)CNN 分类:像认图片一样认触摸
五、实际演示:皮肤能用在机器人上吗?
1. 装在机械臂上(UR5e):人机交互
2. 装在大圆柱上:社交机器人场景
六、结论与局限
1. 核心成果
2. 现存局限
3. 未来方向
核心创新点总结
这篇文章来自 2024 年 8 月的《IEEE/ASME Transactions on Mechatronics》(机电领域顶刊),作者团队同样来自韩国 KAIST 和 DGIST。核心是解决 “机器人皮肤难以理解‘社交触觉’” 的问题 —— 让机器人像人一样,通过触摸的 “位置”(比如拍背、打脸)和 “方式”(比如轻拍、敲击),读懂人的情绪或意图(鼓励、不满),而实现这一目标的关键是模仿人类皮肤的结构和环层小体(Pacinian Corpuscle)的感知功能。
一、引言:为什么需要 “像人一样” 的机器人皮肤?
1. 社交触觉的重要性
对人来说,皮肤不仅是 “感知触碰” 的器官,更是 “社交沟通” 的工具:
- 轻拍后背 = 鼓励,用力打脸 = 冒犯;
- 抚摸 = 安慰,敲击 = 提醒。这些 “社交触觉” 的意义,靠的是时空特征——“哪里被摸”(空间位置)和 “怎么摸”(时间模式,比如轻 / 重、快 / 慢)。而机器人要和人自然交互(比如陪伴机器人、协作机器人),也需要读懂这些触觉信号。
2. 现有机器人皮肤的三大痛点
之前的机器人皮肤要么 “不好用”,要么 “用不了”,核心问题集中在三点:
- 传感元件太多:比如贴满小传感器,布线复杂、成本高,还容易坏;
- 感知带宽窄:只能测 “按压力度”,测不了高频振动(比如手指轻挠的振动),而人类皮肤能感知 20-1000Hz 的信号(靠环层小体);
- 易碎且不灵活:很多皮肤含刚性部件(比如金属电极),碰撞容易坏,还贴不上机器人的曲面(比如机械臂、圆柱状社交机器人)。
3. 作者的解决方案:仿生设计
作者发现,人类皮肤能高效感知社交触觉,靠的是两点:
- 多层结构:表皮(接触外界)、真皮(分散刺激、提供弹性);
- 环层小体:皮肤深处的 “高频传感器”,虽然分布稀疏,但感受范围大,能捕捉振动。
于是提出仿生机器人皮肤:
- 用 “多层织物” 模仿人类皮肤层(表皮 + 真皮);
- 用 “封装麦克风节点(EMNs)” 模仿环层小体;
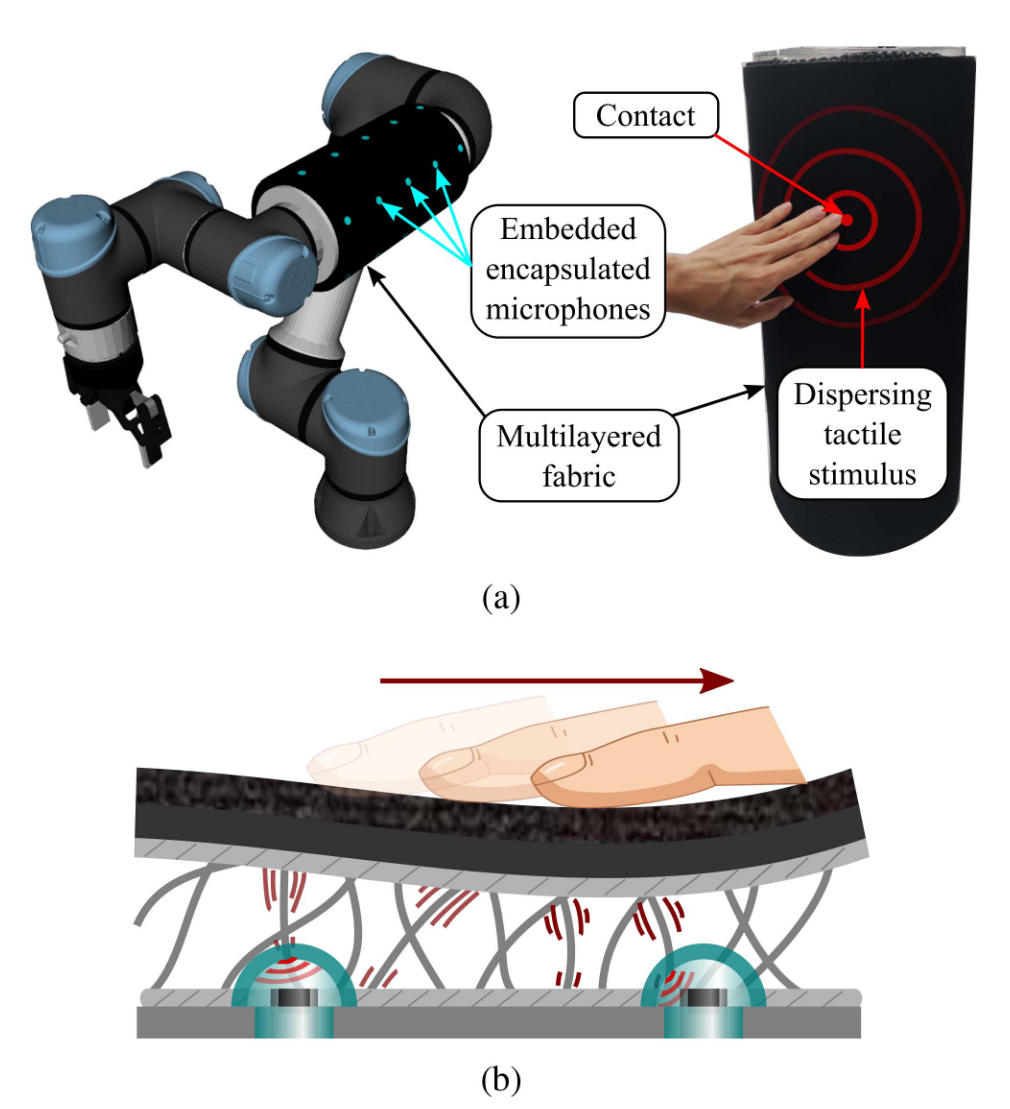
- 再结合算法(被动声学层析成像 + CNN),让少量传感节点就能定位触摸位置、分类触摸方式(图 1:左图是装在机械臂上的皮肤,右图是触觉感知原理 —— 触摸通过织物分散到 EMNs)。
二、核心:仿生结构与制作方法
这部分是文章的 “硬件基础”—— 皮肤的 “身体” 怎么造,怎么模仿人的皮肤。
1. 多层织物:模仿人类皮肤的 “表皮 + 真皮”
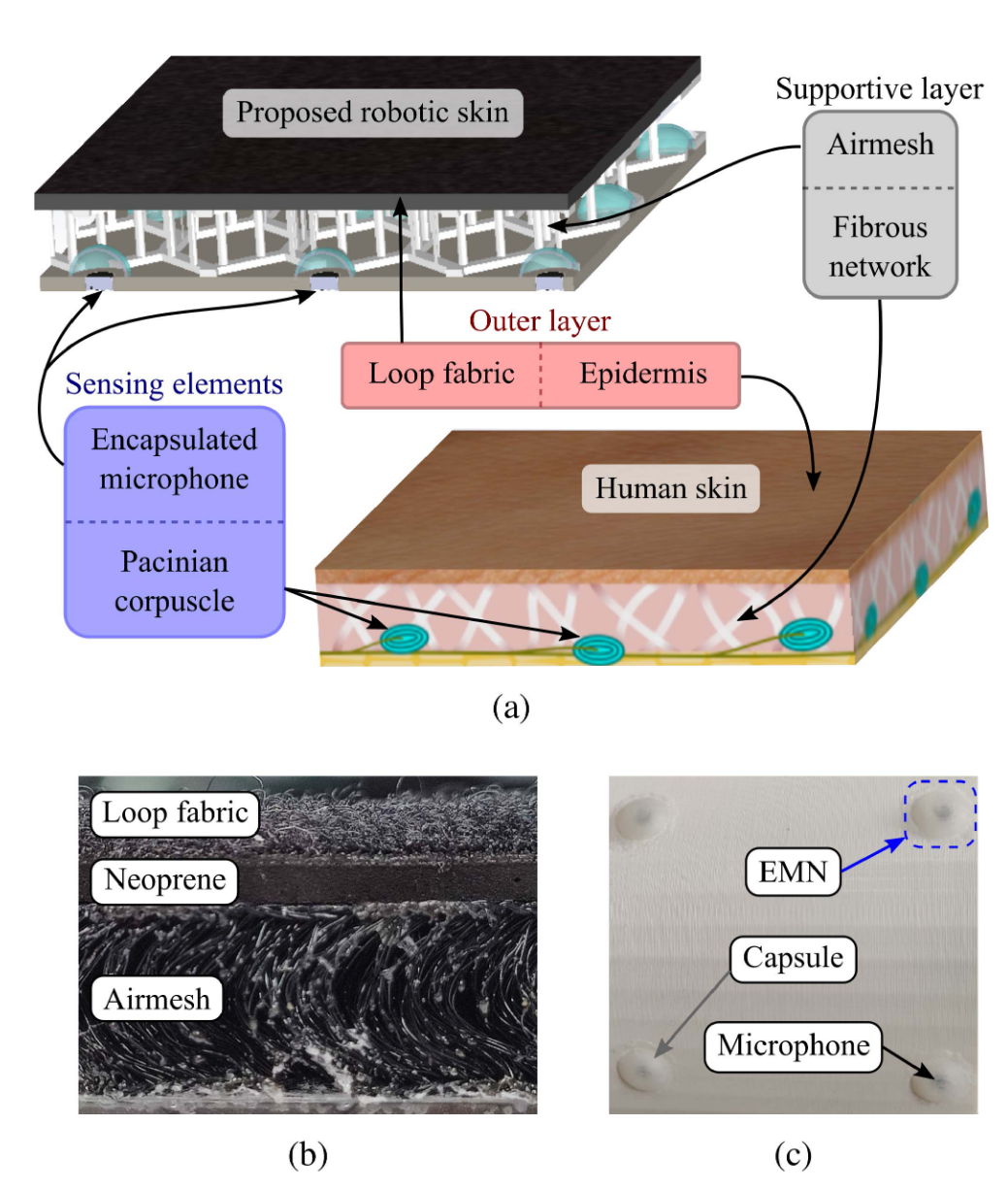
人类皮肤的表皮负责 “接触编码”(比如毛发感知轻触),真皮负责 “分散刺激 + 提供弹性”(比如按压后能回弹)。作者用三层织物实现这些功能(图 2 (b)):
| 织物层 | 模仿人体结构 | 核心功能 |
|---|---|---|
| 环布 - 氯丁橡胶 | 表皮 + 毛发 | 外层是蓬松的尼龙环布(像毛发),内层是氯丁橡胶(像表皮);触摸时能 “编码” 触觉(比如轻挠的振动),还能回弹。 |
| 空气网(Airmesh) | 真皮纤维网络 | 聚酯材料,两层蜂窝结构用 140 根 / 平方厘米的纤维连接;像真皮一样有弹性、能拉伸,还能 “分散刺激”—— 比如按一个点,刺激会扩散到周围,让远处的 EMN 也能感知(扩大感受范围)。 |
2. 封装麦克风节点(EMNs):模仿环层小体
环层小体的特点是 “深、少、灵”—— 在皮肤深处,数量少,但对 20-1000Hz 的高频振动敏感。作者用 “封装麦克风” 模仿它(图 2 (c)):
- 核心元件:电容麦克风(原本测声音,改装后测振动);
- 封装结构:麦克风外面套一个硅胶穹顶(Dragon Skin 20),形成 “空气腔”;
- 仿生原理:硅胶穹顶像环层小体的 “同心层”,能把触摸产生的 “结构振动”(比如手指敲击的振动)转化为空气腔的压力变化,再传给麦克风;同时隔绝外界声音噪声,只对触摸振动敏感。
这样改造后,EMNs 就能像环层小体一样:对高频振动敏感,感受范围大(不用贴满,少量就能覆盖大面积)。
3. 皮肤怎么造出来?
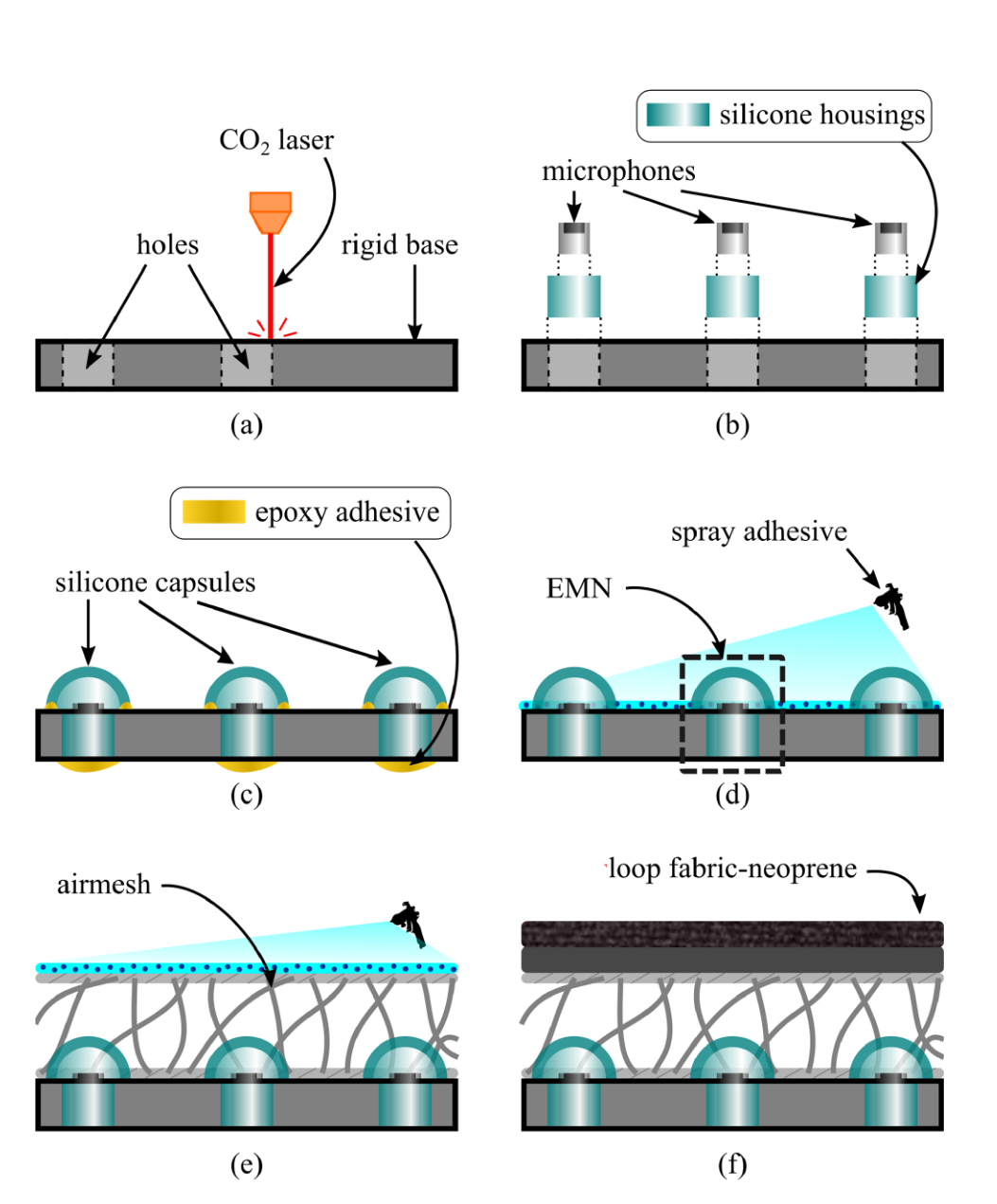
制作流程很简单,普通人用基础工具也能复现,核心是 “激光切割 + 粘贴”:
- 做底座:用亚克力板(或塑料、木头)做刚性底座,激光切 16 个孔(4×4 阵列,孔间距 75mm),用来装 EMNs;
- 装麦克风:3D 打印硅胶环,把麦克风固定在环里,再用环氧树脂粘到底座的孔里;
- 封硅胶穹顶:用 3D 打印模具做硅胶穹顶,粘在麦克风上,形成 EMN;
- 贴织物:先贴空气网(用喷雾胶),再贴环布 - 氯丁橡胶(氯丁橡胶面朝下贴空气网);
- 接线:麦克风线从底座下方引出(避免裸露,防碰撞)。
最终皮肤厚 13mm,密度 0.14g/cm²(比之前用水凝胶的皮肤轻 10 倍,还不脱水)。
三、验证:这皮肤真的 “像人” 吗?
光说仿生不够,作者做了 4 组实验,证明皮肤的性能和人类皮肤接近,且能稳定工作。
1. 验证 1:织物的力学性能 —— 摸起来像人的皮肤
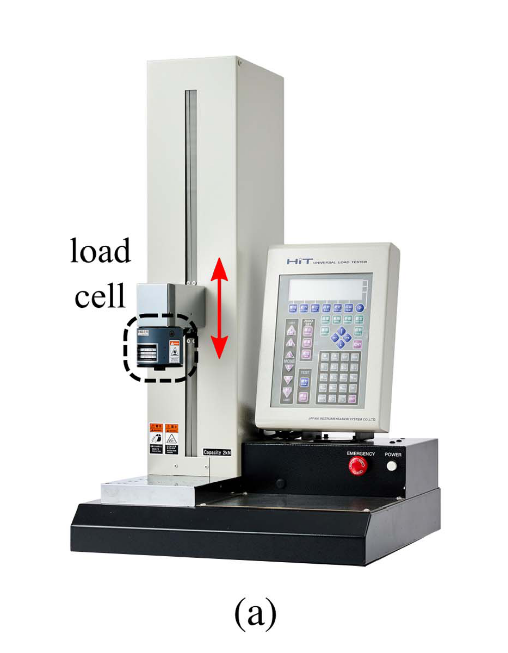
人类皮肤的特点是 “软且有弹性”(比如按压后能慢慢回弹,即 “粘弹性”)。作者用拉力试验机测织物的力学性能(图 4 (a)):
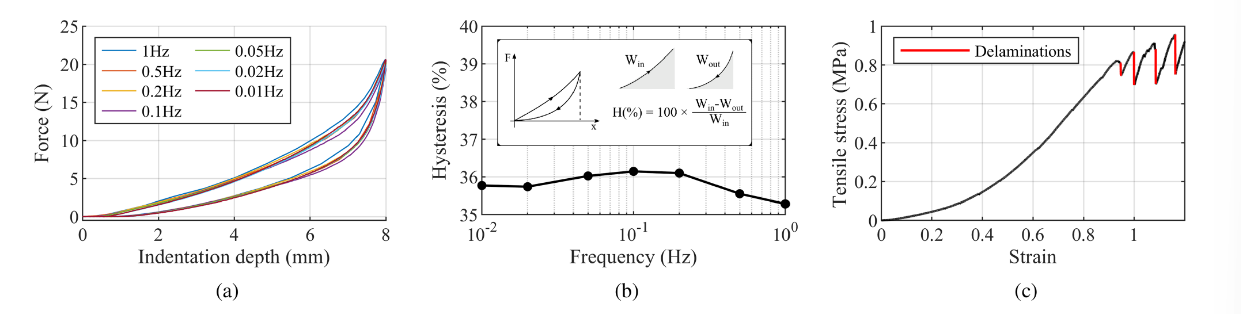
按压曲线(图 5 (a)):不同按压速度下,力和深度的关系和人类皮肤一致 —— 按得越快,瞬间力越大,但回弹后能恢复;
力学滞后(图 5 (b)):按压和回弹的力差(滞后)在 “人类眼眶皮肤” 的范围内(眼眶皮肤较薄,弹性接近机器人皮肤的需求);
拉伸性能(图 5 (c)):能拉伸到原长的 1.8 倍才分层,说明贴在机器人曲面上不会扯坏。
通俗说:这皮肤摸起来的 “软硬度”“弹性” 和人的皮肤差不多,不会一按就塌,也不会一拉就破。
2. 验证 2:刺激分散 —— 感受范围大,不用贴满 EMNs
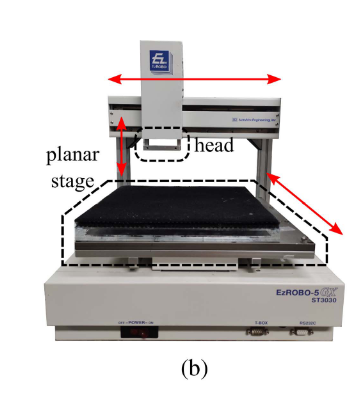
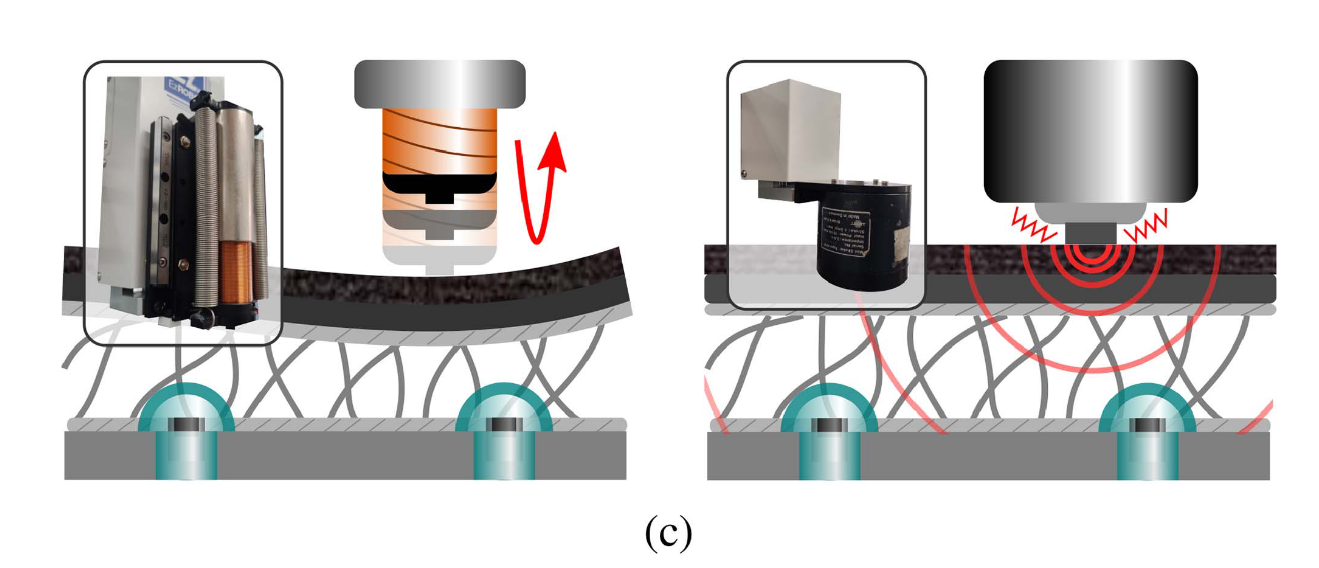
人类环层小体虽然少,但感受范围大(比如一个环层小体能覆盖几厘米),靠的是真皮分散刺激。作者用 “敲击实验” 验证这一点(图 4 (b)(c)):
在皮肤表面按 16×16 网格点(共 256 个点)敲击,测每个 EMN 的信噪比(SNR);
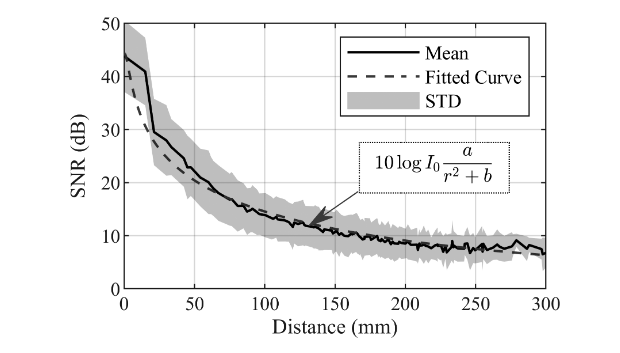
结果(图 6):SNR 随距离增加而降低,但即使距离 EMN20cm,SNR 仍能满足检测需求;感受范围达 178mm(比 EMNs 的间距 75mm 大很多),且多个 EMNs 的感受范围会重叠。
这意味着:只需要少量 EMNs(比如 16 个),就能覆盖整个皮肤 —— 解决了 “传感元件太多” 的痛点。
3. 验证 3:EMNs 的灵敏度 —— 能测高频振动,像环层小体
环层小体的核心能力是 “感知 20-1000Hz 的高频振动”。作者对比 “封装” 和 “未封装” 麦克风的频率响应(图 7):
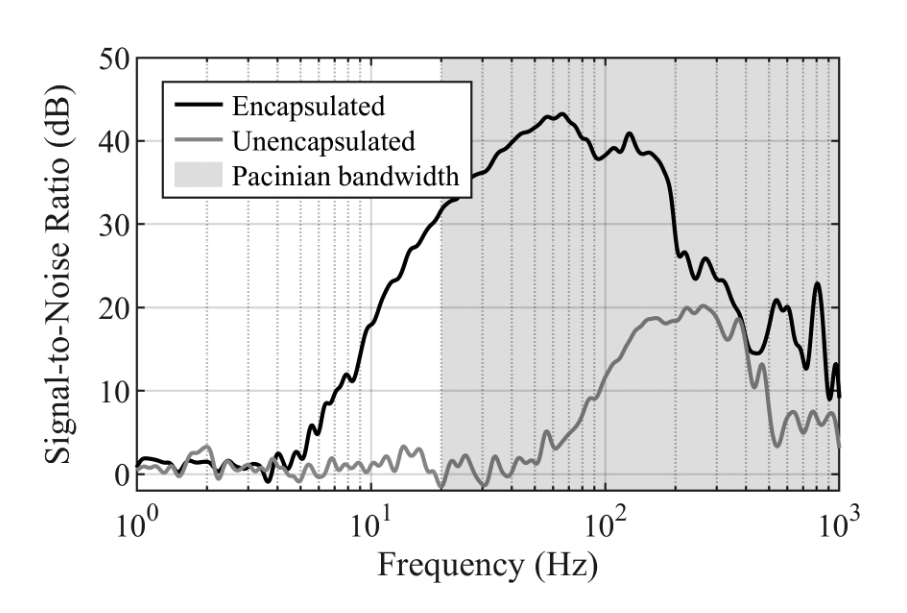
- 未封装麦克风:只能测 50Hz 以上的信号,低频(20-50Hz)测不到;
- 封装后的 EMNs:能测 20-1000Hz 的信号,刚好覆盖环层小体的感知范围,且信噪比更高(信号更清晰)。
通俗说:EMNs 能捕捉到手指轻挠(~50Hz)、手机振动(~200Hz)这类高频信号,而普通麦克风做不到。
4. 验证 4:鲁棒性 —— 坏几个 EMNs 也能用
机器人皮肤难免碰撞,EMNs 可能坏。作者模拟 “EMN 失效”(故意让 1-4 个 EMN 无信号),看定位误差变化(图 8):
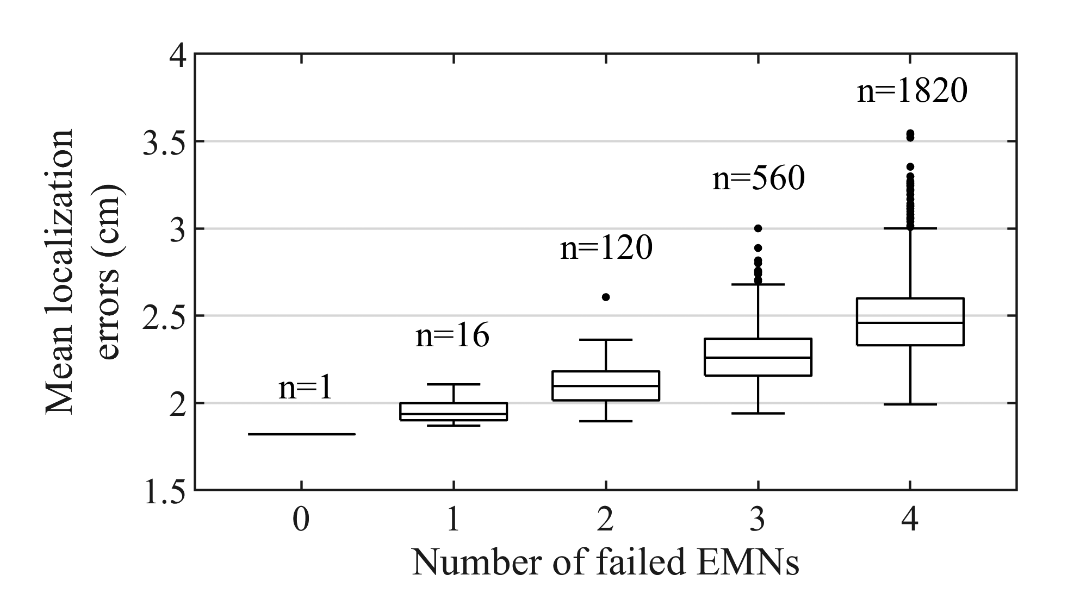
- 无失效:定位误差 1.8cm;
- 坏 1 个:误差 1.96cm(只增加 7.4%);
- 坏 4 个:误差 2.48cm(增加 36.2%),仍小于人类躯干的触觉分辨精度(2-3cm)。
这说明皮肤很 “抗造”,即使部分 EMNs 坏了,也不影响基本感知。
四、算法:机器人怎么 “读懂” 触觉?
有了硬件基础,还需要算法让机器人 “理解”:“哪里被摸了”(定位)、“怎么摸的”(分类)。
1. 触摸定位:用被动声学层析成像(PAT)
人类能靠两只耳朵判断声音来源,机器人皮肤靠 “多个 EMNs 测信号强度” 定位触摸位置(图 1 (b)):
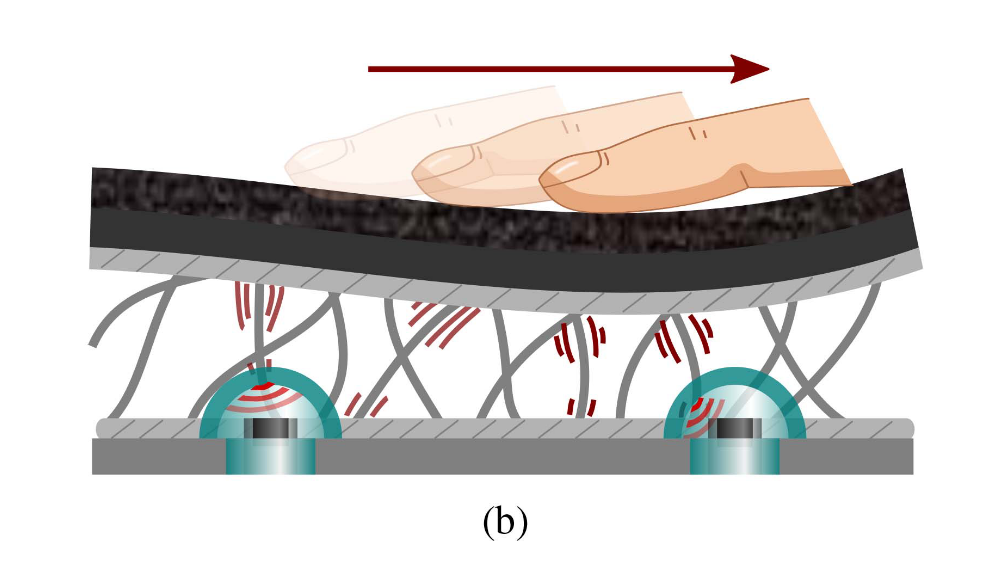
- 原理:触摸产生的振动会向四周扩散,距离越近的 EMN,信号越强;
- 算法步骤:
- 每个 EMN 测到信号强度\(I_i\);
- 根据公式\(I_i = I_0 \times \frac{a}{r_i^2 + b}\)(\(r_i\)是 EMN 到触摸点的距离),反推触摸点位置;
- 最小化 “不同 EMN 计算出的位置误差”,得到最终定位。
- 结果:256 个触摸点的定位误差均值 1.8cm,比人类躯干的触觉精度(2-3cm)还高。
2. 触摸分类:用 CNN 识别 “触摸方式”
人类能区分 “轻拍” 和 “敲击”,靠的是触摸的 “时空特征”(比如轻拍快且弱,敲击重且慢)。作者用 CNN 提取这些特征,分 9 类(8 种社交触摸 + 无接触):
(1)提取特征:把信号变成 “图片”
触摸信号太抽象,先做成两种 “特征图”(图 9 (a)):
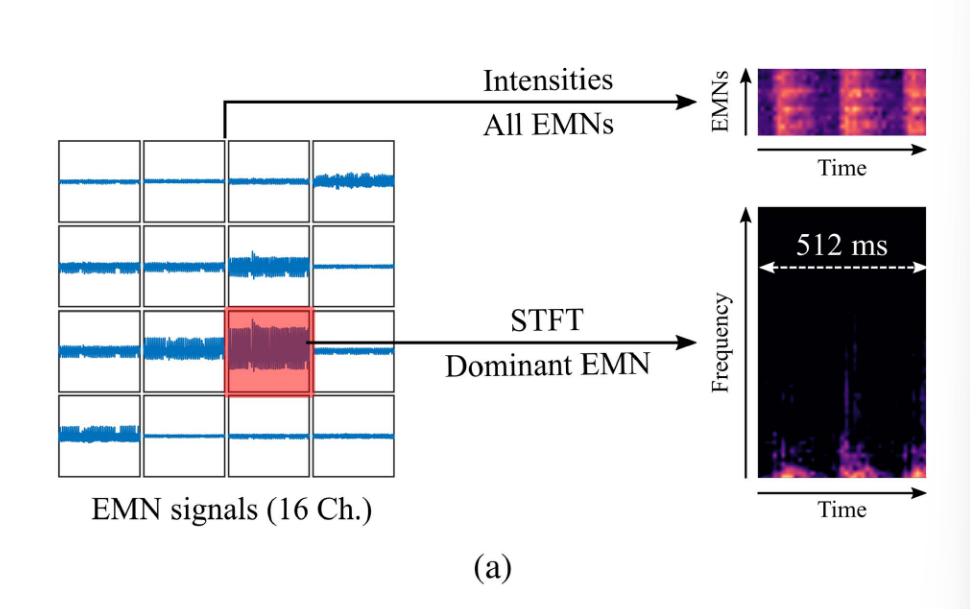
- 强度图:所有 EMNs 的信号强度随时间变化(比如轻拍时强度突然升高又下降);
- 频谱图:选信号最强的 EMN(离触摸点最近),做 “频率 - 时间” 图(比如挠痒的高频信号多,按压的低频信号多)。
(2)CNN 分类:像认图片一样认触摸
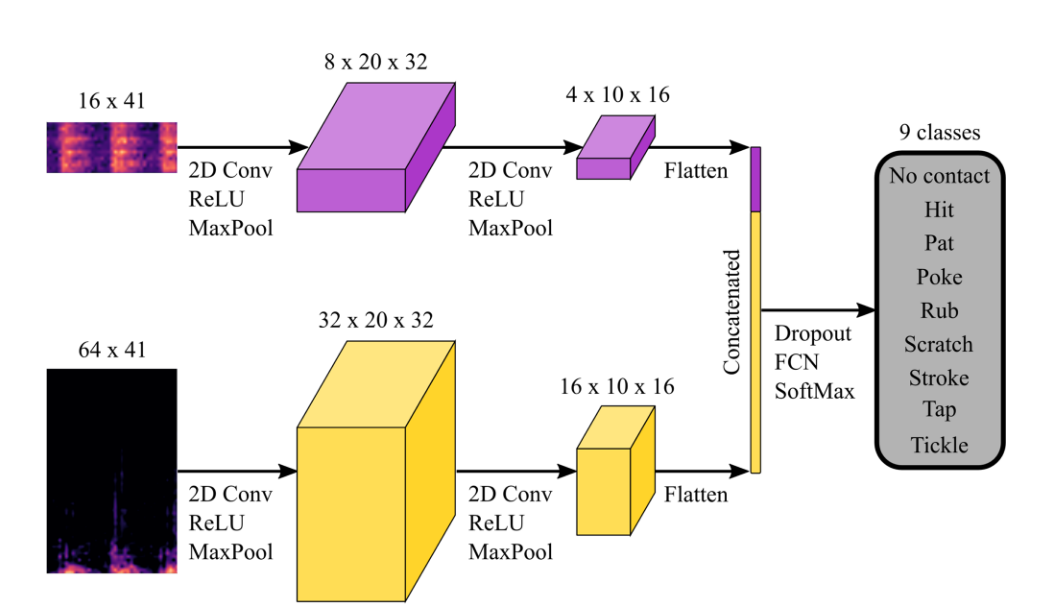
CNN 擅长处理图片,作者把两种特征图当 “双输入图片”,训练网络分类:
- 网络结构:2 层卷积(提取局部特征)→池化(压缩数据)→全连接层(综合特征)→Softmax(输出 9 类概率);
- 数据集:4 个人按 8 种方式触摸皮肤,收集 1000 组训练数据,加噪声增强到 72 万组;
- 结果:分类准确率 93.3%,远高于只用强度图(89.5%)或频谱图(83.1%)的情况。
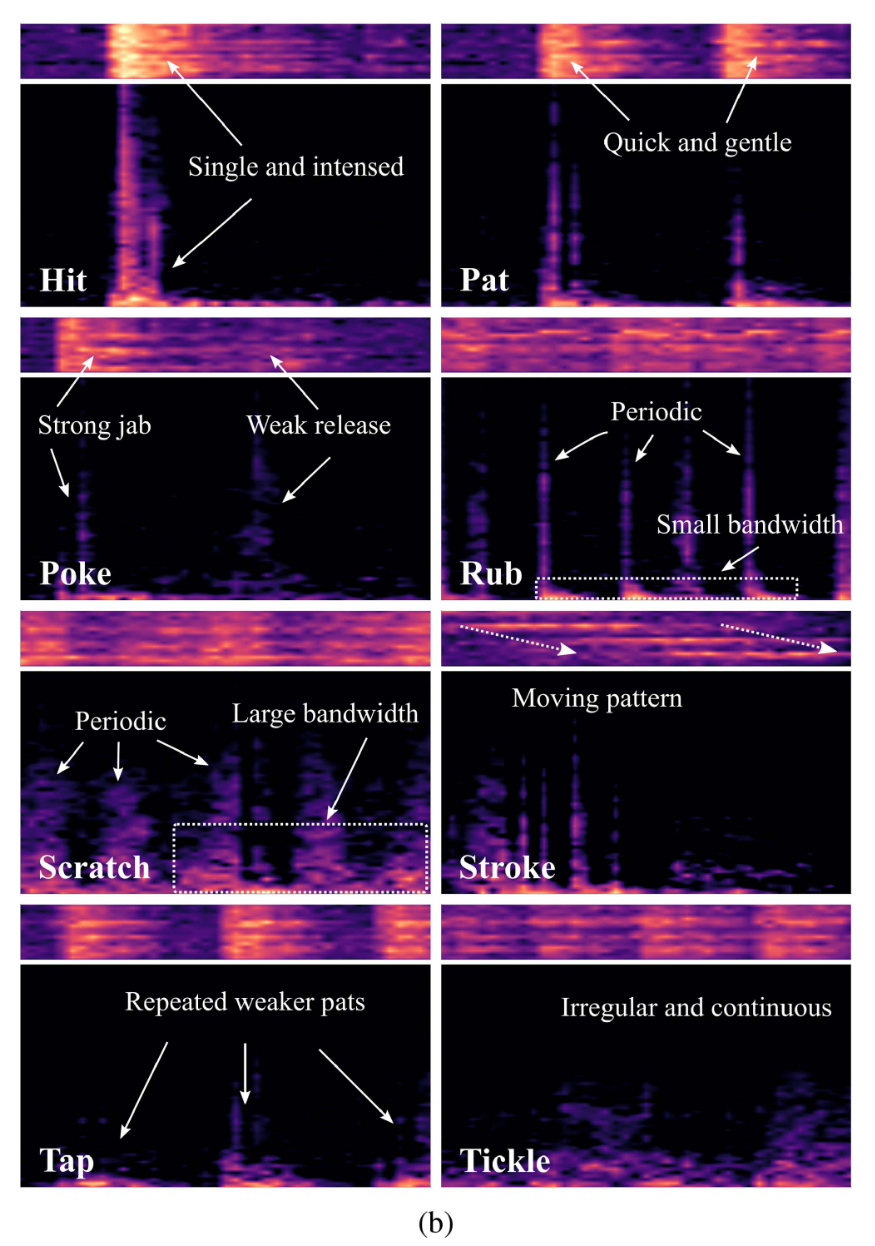
8 种触摸方式的特征很清晰:比如 “敲击(Hit)” 强度大、带宽窄;“挠痒(Tickle)” 强度弱、频率不规则。
五、实际演示:皮肤能用在机器人上吗?
作者做了两个关键演示,证明皮肤的 “实用性”—— 不是实验室玩具,能装在真实机器人上。
1. 装在机械臂上(UR5e):人机交互
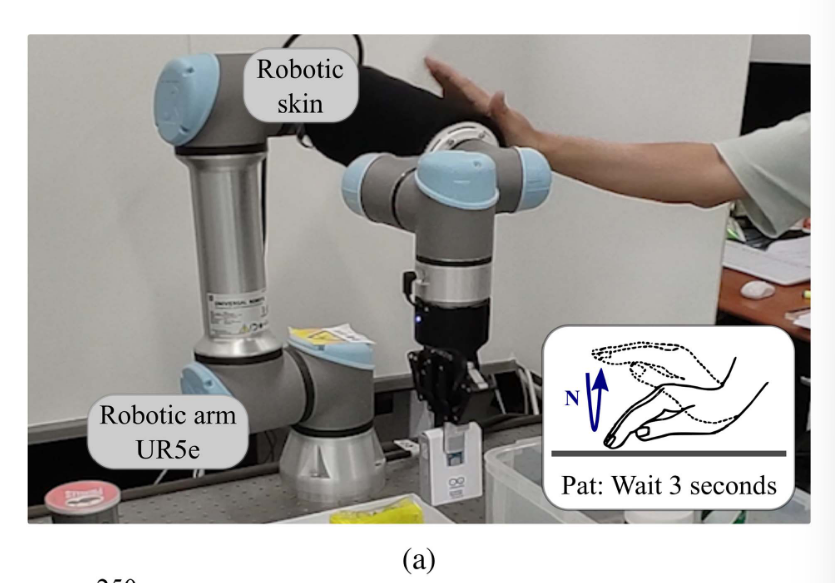
把皮肤装在 UR5e 机械臂的圆柱关节上(30 个 EMNs,密度 406 个 /m²),让机械臂 “边干活边响应触摸”:
- 机械臂正常任务:反复拾取物体;
- 触摸响应:拍一下机械臂→机械臂暂停 3 秒;敲一下→加速;
- 噪声测试:机械臂运动时会产生振动噪声,但速度≤0.1π rad/s 时,噪声不影响 EMN 信号,触摸识别仍准确。
2. 装在大圆柱上:社交机器人场景
社交机器人(比如 NAO)多是圆柱状,作者做了一个直径 250mm、高 570mm 的圆柱(和 NAO 大小相近),只装 30 个 EMNs(密度 67 个 /m²,比机械臂上稀疏):
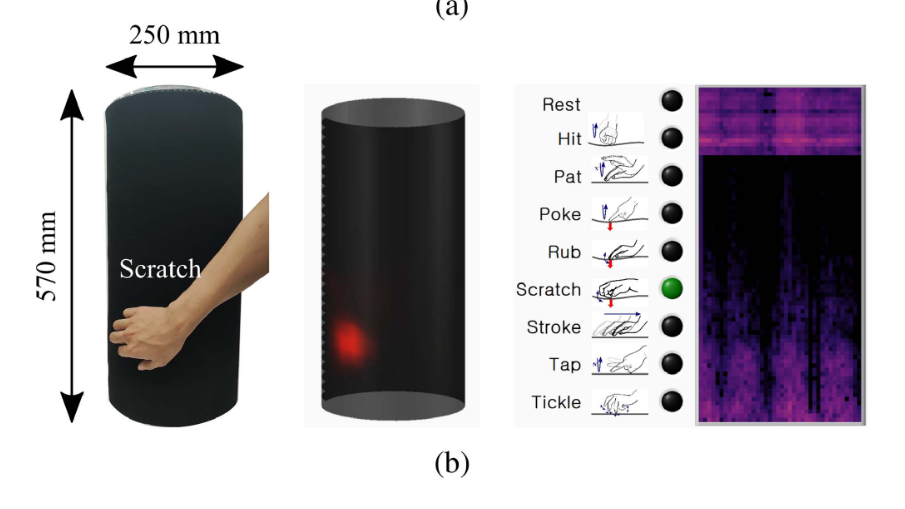
- 演示效果(图 13 (b)):能实时定位触摸位置(显示轨迹)、分类触摸方式(比如轻拍、挠痒);
- 关键意义:证明皮肤能 “大面积扩展”—— 不用增加太多 EMNs,就能覆盖社交机器人的曲面。
六、结论与局限
1. 核心成果
这篇文章做出了一款 “能理解社交触觉” 的机器人皮肤,解决了三个关键问题:
- 少节点覆盖大面积:靠空气网的刺激分散和 EMNs 的大感受野,少量节点就能用;
- 宽带宽感知:EMNs 覆盖 20-1000Hz,能测人类皮肤能感知的振动;
- 灵活抗造:全柔性织物 + 无裸露部件,能贴曲面、抗碰撞。
2. 现存局限
虽然好用,但还有改进空间:
- 测不了静态力:比如 “按住不动” 的压力,因为麦克风只能测振动,不能测静态形变;
- 不能多触点:目前只能识别 “一个点触摸”,没法区分 “同时按两个点”;
- 拉伸性有限:织物能弯曲,但拉伸太多会分层,贴不了机器人的尖锐曲面(比如手指关节)。
3. 未来方向
- 改进材料:让皮肤更有拉伸性;
- 升级算法:支持多触点识别;
- 增加传感器:结合压力传感器,测静态力。
核心创新点总结
- 仿生设计创新:首次用 “多层织物 + 封装麦克风” 分别模仿人类皮肤层和环层小体,从结构到功能都贴近人体,解决了带宽窄、不灵活的问题;
- 传感效率创新:靠空气网的刺激分散和 EMNs 的大感受野,实现 “少节点覆盖大面积”(67 个 /m² 就能用),避免了元件过多的问题;
- 算法融合创新:用 PAT 定位(精度 1.8cm)+ 双特征 CNN 分类(准确率 93.3%),让机器人能同时 “知其位、知其类”,读懂社交触觉;
- 实用性创新:全柔性、无裸露部件,能装在机械臂和社交机器人上,还能抗 EMN 失效,满足实际交互需求。