【强化学习核心解析】特点、分类与DQN算法及嵌入式低功耗应用
文章目录
- 引言
- 一、强化学习的核心特点:区别于传统机器学习的关键
- 1.1 试错学习(Trial-and-Error Learning)
- 1.2 延迟奖励(Delayed Reward)
- 1.3 智能体与环境的动态交互
- 1.4 策略优化为核心目标
- 二、强化学习的分类对比:多维度拆解技术体系
- 2.1 按“是否基于环境模型”分类(核心分类维度)
- 2.2 按“学习目标”分类(策略优化 vs 价值优化)
- 2.3 按“探索与利用策略”分类(平衡试错与收益的关键)
- 2.4 按“动作空间类型”分类(场景适配的关键)
- 三、DQN算法:深度强化学习的“入门标杆”与核心技术
- 3.1 DQN的核心背景:为什么需要DQN?
- 3.2 DQN的核心原理:从Q-learning到深度近似
- 3.2.1 基础:Q-learning的更新规则
- 3.2.2 DQN的改进:用神经网络近似Q函数
- 3.3 DQN的两大关键技术:解决训练稳定性问题
- 3.3.1 经验回放(Experience Replay)
- 3.3.2 目标Q网络(Target Q-Network)
- 3.4 DQN的训练流程:Step-by-Step拆解
- 3.5 DQN的改进算法:解决原DQN的局限性
- 四、DQN在嵌入式低功耗场景的应用:挑战与优化策略
- 4.1 嵌入式低功耗设备的核心约束
- 4.2 DQN在嵌入式低功耗场景的典型应用
- 4.2.1 智能家居低功耗设备控制
- 4.2.2 可穿戴设备的健康监测与功耗调节
- 4.2.3 工业物联网(IIoT)低功耗节点控制
- 4.3 DQN的嵌入式低功耗优化策略
- 4.3.1 算法简化:降低计算与存储开销
- 4.3.2 模型压缩:减小网络体积与推理功耗
- 4.3.3 硬件适配:利用嵌入式专用硬件加速
- 五、总结
引言
若对您有帮助的话,请点赞收藏加关注哦,您的关注是我持续创作的动力!有问题请私信或联系邮箱:funian.gm@gmail.com
强化学习(Reinforcement Learning, RL)是机器学习三大范式(监督学习、无监督学习、强化学习)中最接近人类“试错学习”逻辑的分支——它通过智能体(Agent)与环境(Environment)的动态交互,以“延迟奖励”为反馈信号优化决策策略,最终实现目标最大化。随着嵌入式设备(如可穿戴设备、IoT节点)向“智能化+低功耗”方向发展,传统复杂RL算法因算力、内存、功耗需求高难以部署,而DQN(Deep Q-Network)作为“深度学习+强化学习”的经典融合算法,通过改进后可适配嵌入式低功耗场景,成为边缘智能决策的重要技术支撑。本文将从强化学习基础出发,聚焦DQN核心技术与嵌入式应用落地,为开发者提供从理论到实践的完整视角。
一、强化学习的核心特点:区别于传统机器学习的关键
强化学习的本质是“智能体在环境中通过试错积累经验,学习最优决策策略”,其核心特点与监督/无监督学习存在显著差异,具体可概括为4点:
1.1 试错学习(Trial-and-Error Learning)
- 核心逻辑:智能体无需预先获取“正确答案”(如监督学习的标签),而是通过主动执行动作(Action)、观察环境反馈(Reward),不断调整策略——“做得好就强化,做得差就修正”。
- 典型场景:机器人学习行走时,摔倒(负奖励)后调整关节角度,平稳行走(正奖励)后保留动作模式,最终掌握平衡策略。
- 与监督学习的差异:监督学习依赖“输入-标签”的即时反馈,强化学习依赖“动作序列-延迟奖励”的累积反馈,更贴近人类从实践中学习的过程。
1.2 延迟奖励(Delayed Reward)
- 核心逻辑:强化学习的奖励并非即时获取,而是在执行一系列动作后才能得到(即“长期奖励”),智能体需判断“当前动作对最终目标的贡献”。
- 示例:围棋AI(如AlphaGo)落子后,需等到棋局结束(赢/输)才能获得最终奖励,中间每一步落子的“价值”需通过后续局势间接评估。
- 关键挑战:如何将“延迟奖励”合理分配到每一步动作中,是强化学习的核心问题(如Q-learning通过“折扣奖励”解决该问题)。
1.3 智能体与环境的动态交互
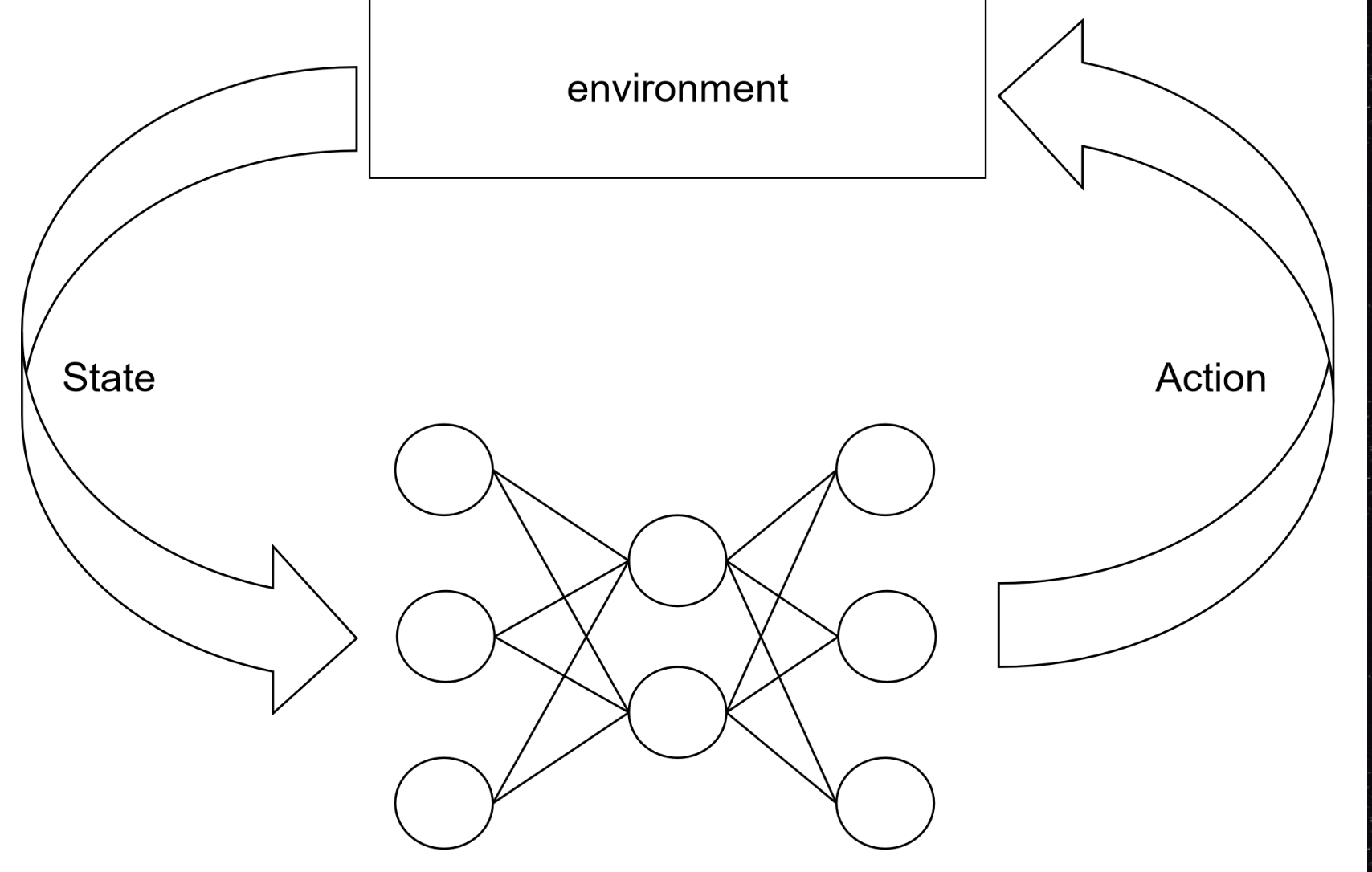
- 核心逻辑:强化学习的核心框架是“智能体→动作→环境→状态/奖励→智能体”的闭环交互,环境状态(State)会因智能体的动作动态变化,智能体的策略也会随环境反馈迭代优化。
- 数学描述:该交互过程通过马尔可夫决策过程(MDP) 建模,MDP包含5个核心要素:
- 状态空间 ( S ):环境所有可能状态的集合(如机器人的位置、速度);
- 动作空间 ( A ):智能体可执行的所有动作的集合(如机器人的“前进”“转向”);
- 奖励函数 ( R(s,a) ):在状态 ( s ) 执行动作 ( a ) 后获得的即时奖励;
- 状态转移概率 ( P(s’|s,a) ):在状态 ( s ) 执行动作 ( a ) 后转移到状态 ( s’ ) 的概率;
- 折扣因子 ( \gamma )(0≤γ≤1):衡量未来奖励的权重(γ=0仅关注即时奖励,γ=1同等重视未来奖励)。
1.4 策略优化为核心目标
- 核心逻辑:强化学习的最终目标是学习一个最优策略 ( \pi^*(a|s) )——即在任意状态 ( s ) 下,选择能最大化“长期累积奖励”的动作 ( a )。
- 策略表示:策略分为“确定性策略”(( a = \pi(s) ),每个状态对应唯一动作)和“随机性策略”(( \pi(a|s) = P(a|s) ),每个状态对应动作的概率分布),DQN等价值优化算法通过间接优化价值函数实现策略优化。
二、强化学习的分类对比:多维度拆解技术体系
强化学习可按“是否依赖环境模型”“学习目标”“动作空间类型”等维度分类,不同类别算法的适用场景、复杂度差异显著,通过表格对比可清晰区分:
2.1 按“是否基于环境模型”分类(核心分类维度)
| 分类 | 核心思想 | 优缺点 | 代表算法 | 适用场景 |
|---|---|---|---|---|
| 基于模型(Model-Based RL) | 先学习环境模型(状态转移概率 ( P ) + 奖励函数 ( R )),再基于模型优化策略 | 优点:可通过模型模拟环境,减少与真实环境交互次数(降低试错成本); 缺点:模型建模难度高,模型误差会导致策略失效 | Dyna-Q、蒙特卡洛树搜索(MCTS,如AlphaGo核心) | 环境交互成本高的场景(如工业机器人试错易损坏设备) |
| 无模型(Model-Free RL) | 不建模环境,直接通过与环境交互学习策略/价值函数 | 优点:无需建模,适用于复杂未知环境; 缺点:需大量与环境交互,试错成本高 | Q-learning、DQN、策略梯度(PG)、PPO | 环境简单/交互成本低的场景(如游戏、嵌入式轻量决策) |
2.2 按“学习目标”分类(策略优化 vs 价值优化)
| 分类 | 核心思想 | 优缺点 | 代表算法 | 动作空间适配 |
|---|---|---|---|---|
| 价值优化(Value-Based RL) | 学习“状态/状态-动作的价值”(如Q值),通过价值函数间接推导策略(如选择价值最大的动作) | 优点:决策稳定,易实现; 缺点:仅适用于离散动作空间,难以处理连续动作 | Q-learning、DQN、Double DQN | 离散动作(如游戏“上下左右”、嵌入式设备“开/关/调节档位”) |
| 策略优化(Policy-Based RL) | 直接参数化策略(如用神经网络表示策略),通过梯度上升最大化累积奖励 | 优点:适用于连续动作空间,策略输出更直接; 缺点:训练不稳定(奖励波动大),易陷入局部最优 | 策略梯度(PG)、近端策略优化(PPO)、DDPG | 连续动作(如机器人关节角度控制、无人机飞行姿态调节) |
| 演员-评论家(Actor-Critic RL) | 结合价值优化(Critic评估价值)和策略优化(Actor执行策略),用价值函数减少策略梯度方差 | 优点:兼顾连续动作适配性和训练稳定性; 缺点:模型复杂度高,需同步训练两个网络 | DDPG、TD3、SAC | 连续动作场景(如工业控制、自动驾驶) |
2.3 按“探索与利用策略”分类(平衡试错与收益的关键)
| 分类 | 核心思想 | 优缺点 | 适用场景 |
|---|---|---|---|
| ε-贪婪策略(ε-greedy) | 以概率 ( 1-\varepsilon ) 选择当前价值最大的动作(利用),以概率 ( \varepsilon ) 随机选择动作(探索),( \varepsilon ) 随训练迭代减小 | 优点:实现简单,易调节探索强度; 缺点:后期仍有随机探索,可能选择差动作 | 多数Model-Free算法(如DQN、Q-learning) |
| 上限置信区间(UCB) | 选择“价值估计值 + 不确定性惩罚项”最大的动作,不确定性随尝试次数增加而降低 | 优点:主动探索高潜力但尝试少的动作,探索更高效; 缺点:计算复杂度高,依赖价值估计的不确定性量化 | 多臂老虎机问题、MCTS |
| 玻尔兹曼探索(Boltzmann Exploration) | 按动作价值的softmax概率选择动作,温度参数 ( T ) 控制探索强度(( T ) 大则探索强,( T ) 小则利用强) | 优点:探索强度平滑变化,避免极端随机; 缺点:温度参数调优复杂 | 价值优化算法(如Q-learning)的进阶探索策略 |
2.4 按“动作空间类型”分类(场景适配的关键)
| 分类 | 核心特点 | 代表算法 | 典型应用场景 |
|---|---|---|---|
| 离散动作RL | 动作空间有限且离散(如“0/1”“上下左右”),价值函数易建模 | Q-learning、DQN、Double DQN | 游戏(Atari)、嵌入式设备档位控制(如灯光亮度3档调节) |
| 连续动作RL | 动作空间无限且连续(如“01之间的电压值”“-ππ的角度”),需参数化策略 | DDPG、PPO、SAC | 机器人控制(关节角度)、无人机飞行控制、工业设备参数调节 |
三、DQN算法:深度强化学习的“入门标杆”与核心技术
DQN(Deep Q-Network)由DeepMind于2013年提出,首次将深度学习(神经网络) 与Q-learning(传统价值优化算法) 结合,解决了传统Q-learning在“高维状态空间”(如游戏像素画面)中无法建模的问题,开启了深度强化学习的新时代。
3.1 DQN的核心背景:为什么需要DQN?
传统Q-learning的局限性:
- 传统Q-learning用“Q表格”存储所有“状态-动作对”的Q值(( Q(s,a) ) 表示在状态 ( s ) 执行动作 ( a ) 的长期累积奖励);
- 当状态空间高维(如Atari游戏的210×160×3像素画面,状态数达 ( 256^{210×160×3} ))时,Q表格无法存储(维度灾难);
- DQN的解决方案:用深度神经网络(CNN/MLP)近似Q函数,即 ( Q(s,a;\theta) ),其中 ( \theta ) 是网络参数,通过训练网络拟合真实Q值。
3.2 DQN的核心原理:从Q-learning到深度近似
3.2.1 基础:Q-learning的更新规则
Q-learning的核心是通过“时序差分(TD)误差”更新Q值,目标是让当前Q值逼近“即时奖励+未来最优Q值”,更新公式如下:
[ Q(s_t,a_t) \leftarrow Q(s_t,a_t) + \alpha \cdot \left[ r_t + \gamma \cdot \max_{a’} Q(s_{t+1},a’) - Q(s_t,a_t) \right] ]
其中:
- ( \alpha )(0<α<1):学习率,控制每次更新的幅度;
- ( r_t ):在状态 ( s_t ) 执行动作 ( a_t ) 获得的即时奖励;
- ( \max_{a’} Q(s_{t+1},a’) ):状态 ( s_{t+1} ) 下所有动作的最大Q值(即未来最优价值)。
3.2.2 DQN的改进:用神经网络近似Q函数
DQN将Q-learning的“Q表格”替换为“Q网络”,网络输入为环境状态 ( s_t )(如游戏像素),输出为每个动作 ( a ) 对应的Q值 ( Q(s_t,a;\theta) ),此时更新规则变为“最小化TD误差的平方损失”:
[ \mathcal{L}(\theta) = \mathbb{E}_{(s,a,r,s’) \sim \mathcal{D}} \left[ \left( y_t - Q(s,a;\theta) \right)^2 \right] ]
其中:
- ( \mathcal{D} ) 是经验回放池(Replay Buffer),存储智能体与环境交互的“经验样本”( (s,a,r,s’) );
- ( y_t = r + \gamma \cdot \max_{a’} Q’(s’,a’;\theta^-) ) 是“目标Q值”,( Q’ ) 是目标Q网络,参数 ( \theta^- ) 固定一段时间后从当前Q网络同步(非实时更新)。
3.3 DQN的两大关键技术:解决训练稳定性问题
DQN的成功依赖“经验回放”和“目标Q网络”两大创新,这两项技术直接解决了传统深度强化学习的训练不稳定问题:
3.3.1 经验回放(Experience Replay)
- 核心问题:智能体与环境交互的样本具有“时间相关性”(如连续帧的游戏画面高度相似),直接用连续样本训练会导致网络参数震荡(梯度更新方向不稳定)。
- 解决方案:
- 智能体与环境交互时,将每次的经验样本 ( (s,a,r,s’) ) 存储到容量固定的经验回放池 ( \mathcal{D} );
- 训练时从 ( \mathcal{D} ) 中随机抽样一批样本(如32个)更新Q网络;
- 优势:
- 打破样本时间相关性,使样本满足独立同分布(IID)假设,符合深度学习训练要求;
- 同一经验样本可被多次复用,提高数据利用效率(尤其适用于嵌入式场景,减少数据采集量)。
3.3.2 目标Q网络(Target Q-Network)
- 核心问题:若直接用当前Q网络计算目标Q值 ( y_t = r + \gamma \cdot \max_{a’} Q(s’,a’;\theta) ),则目标Q值与待更新的网络参数 ( \theta ) 强相关,导致“目标移动”(目标Q值随 ( \theta ) 变化),训练易发散。
- 解决方案:
- 维护两个结构完全相同但参数独立的Q网络:当前Q网络(( Q(s,a;\theta) )) 和 目标Q网络(( Q’(s,a;\theta^-) ));
- 训练时,目标Q网络的参数 ( \theta^- ) 不实时更新,而是每隔 ( C ) 步(如1000步)从当前Q网络同步一次(( \theta^- \leftarrow \theta ));
- 优势:固定目标Q值的计算基准,减少训练波动,提升网络收敛稳定性。
3.4 DQN的训练流程:Step-by-Step拆解
DQN的训练过程可分为“交互采样”和“网络更新”两大阶段,具体步骤如下:
-
初始化:
- 初始化当前Q网络 ( Q(\theta) ) 和目标Q网络 ( Q’(\theta^-) ),令 ( \theta^- = \theta );
- 初始化经验回放池 ( \mathcal{D} )(容量如1e5~1e6);
- 初始化环境状态 ( s_0 )(如游戏第一帧画面)。
-
交互采样(探索阶段):
- 对当前状态 ( s_t ),用 ( \varepsilon )-greedy策略选择动作 ( a_t ):
- 以概率 ( 1-\varepsilon ) 选择 ( a_t = \arg\max_a Q(s_t,a;\theta) )(利用);
- 以概率 ( \varepsilon ) 随机选择动作 ( a_t )(探索);
- 执行动作 ( a_t ),观察环境反馈的即时奖励 ( r_t ) 和下一状态 ( s_{t+1} );
- 将经验样本 ( (s_t,a_t,r_t,s_{t+1}) ) 存入经验回放池 ( \mathcal{D} );
- 令 ( s_t = s_{t+1} ),若 ( s_{t+1} ) 是终止状态,则重新初始化 ( s_t )。
- 对当前状态 ( s_t ),用 ( \varepsilon )-greedy策略选择动作 ( a_t ):
-
网络更新(学习阶段):
- 当经验回放池容量达到阈值(如1000样本)后,开始训练:
- 从 ( \mathcal{D} ) 中随机抽样一批样本 ( {(s_i,a_i,r_i,s’i)}{i=1}^B )(( B ) 为批次大小,如32);
- 计算每个样本的目标Q值 ( y_i ):
- 若 ( s’_i ) 是终止状态,( y_i = r_i )(无未来奖励);
- 否则,( y_i = r_i + \gamma \cdot \max_{a’} Q’(s’_i,a’;\theta^-) );
- 计算当前Q值 ( Q(s_i,a_i;\theta) )(仅选择动作 ( a_i ) 对应的输出);
- 用梯度下降法最小化损失 ( \mathcal{L}(\theta) = \frac{1}{B} \sum_{i=1}^B (y_i - Q(s_i,a_i;\theta))^2 ),更新当前Q网络参数 ( \theta );
- 每隔 ( C ) 步,同步目标Q网络参数:( \theta^- \leftarrow \theta )。
- 当经验回放池容量达到阈值(如1000样本)后,开始训练:
-
迭代终止:
- 重复步骤2~3,直到累积奖励达到预设阈值(如游戏通关)或训练步数达到上限。
3.5 DQN的改进算法:解决原DQN的局限性
原DQN存在“Q值过估计”(目标Q值偏高)、“未区分状态价值与动作优势”等问题,后续改进算法进一步提升性能,核心改进方向如下:
| 改进算法 | 核心改进点 | 解决的问题 | 性能提升效果 |
|---|---|---|---|
| Double DQN | 用当前Q网络选择最优动作,目标Q网络计算Q值(( y = r + \gamma \cdot Q’(s’,\arg\max_a Q(s’,a;\theta);\theta^-) )) | 原DQN的“max”操作导致Q值过估计(高估动作实际价值) | 降低过估计幅度,提升策略稳定性 |
| Dueling DQN | 将Q网络拆分为“状态价值网络 ( V(s) )”和“动作优势网络 ( A(s,a) )”,Q值=V(s)+(A(s,a)-mean(A(s,a))) | 原DQN需评估所有动作Q值,Dueling DQN可直接学习状态价值,适合状态相似但动作影响小的场景 | 减少动作评估开销,提升高维状态下的学习效率 |
| Prioritized Experience Replay(PER) | 按TD误差大小给经验样本分配优先级,误差大的样本被抽样概率更高 | 原DQN随机抽样,重要样本(误差大)利用率低 | 加速训练收敛,减少训练步数 |
| Rainbow DQN | 融合Double DQN、Dueling DQN、PER、多步TD学习、分布式Q值等6种改进 | 综合解决过估计、样本利用率低、单步奖励偏差等问题 | Atari游戏平均得分超原DQN 100%+ |
四、DQN在嵌入式低功耗场景的应用:挑战与优化策略
嵌入式低功耗设备(如可穿戴设备、IoT传感器节点)的核心约束是“算力有限(CPU主频低、无独立GPU)、内存/存储小、电池供电(功耗敏感)”,直接部署原始DQN会面临严重瓶颈,需从“算法优化”“模型压缩”“硬件适配”三方面突破。
4.1 嵌入式低功耗设备的核心约束
| 约束类型 | 具体表现 | 对DQN的影响 |
|---|---|---|
| 算力约束 | CPU主频多为几百MHz(如ARM Cortex-M系列),无GPU/TPU加速,浮点运算能力弱 | DQN的神经网络前向推理耗时久(如复杂CNN需数百毫秒),无法满足实时决策需求(如可穿戴设备的100ms内响应) |
| 内存/存储约束 | 内存(RAM)多为几十KB几MB,存储(Flash)多为几百KB几十MB | 原始DQN的网络参数(如CNN的百万级参数)无法存入内存,经验回放池需大量存储样本,超出Flash容量 |
| 功耗约束 | 电池容量小(如可穿戴设备的100~500mAh),需低功耗运行(如μA级电流) | DQN的频繁神经网络计算会导致功耗骤升(如推理时电流达mA级),电池续航从几天缩短至几小时 |
| 实时性约束 | 嵌入式场景多需即时决策(如工业传感器的异常响应、可穿戴设备的动作识别) | DQN训练阶段需大量交互,嵌入式设备无法在线训练;推理阶段若耗时超阈值,会导致决策滞后 |
4.2 DQN在嵌入式低功耗场景的典型应用
尽管存在约束,但DQN通过优化后可在“轻量级决策场景”落地,典型应用如下:
4.2.1 智能家居低功耗设备控制
- 场景需求:智能家居传感器(如人体存在传感器、光照传感器)需根据环境变化和用户习惯,优化设备运行模式(如灯光亮度、空调温度),同时降低功耗。
- DQN的作用:
- 状态 ( s ):传感器采集的“光照强度、人体存在状态、当前能耗”;
- 动作 ( a ):“灯光亮度13档、空调温度2426℃”(离散动作);
- 奖励 ( r ):“用户舒适度评分(正奖励)- 能耗值(负奖励)”;
- 优势:DQN学习用户习惯后,可在“舒适度”和“低功耗”间找到最优平衡,如无人时自动调低亮度,降低能耗30%+。
4.2.2 可穿戴设备的健康监测与功耗调节
- 场景需求:可穿戴设备(如智能手环)需实时监测用户行为(如步行、跑步、睡眠),并根据监测结果调节传感器采样频率(如睡眠时降低心率采样频率以省电)。
- DQN的作用:
- 状态 ( s ):“心率值、运动加速度、当前采样频率、剩余电量”;
- 动作 ( a ):“采样频率1Hz/5Hz/10Hz”(离散动作);
- 奖励 ( r ):“监测准确率(正奖励)- 采样功耗(负奖励)”;
- 优势:传统固定采样频率易导致“高功耗”或“低准确率”,DQN可动态调节采样频率,在保证90%+监测准确率的同时,降低设备功耗40%+。
4.2.3 工业物联网(IIoT)低功耗节点控制
- 场景需求:工业场景的低功耗传感器节点(如设备温度传感器、振动传感器)需根据设备运行状态,优化数据传输频率(如异常时高频传输,正常时低频传输),减少无线传输功耗(无线传输是IIoT节点的主要功耗来源)。
- DQN的作用:
- 状态 ( s ):“设备温度、振动幅度、传输链路质量、剩余电量”;
- 动作 ( a ):“传输频率1次/分钟、1次/5分钟、1次/10分钟”;
- 奖励 ( r ):“异常检测成功率(正奖励)- 传输功耗(负奖励)”;
- 优势:DQN可学习设备故障模式,在故障高发期提高传输频率(保证检测率),正常期降低频率(节省功耗),延长节点续航从1年至2年+。
4.3 DQN的嵌入式低功耗优化策略
针对嵌入式设备的约束,需从“算法简化”“模型压缩”“硬件适配”三方面对DQN进行优化,具体策略如下:
4.3.1 算法简化:降低计算与存储开销
-
离线预训练+在线微调:
- 核心逻辑:在服务器端(高算力)完成DQN的主要训练(利用大量样本优化网络参数),嵌入式设备仅加载预训练模型,通过“在线微调”适配具体场景(如用户习惯差异),避免嵌入式端的大量交互采样与训练计算;
- 优势:嵌入式端仅需少量参数更新(如微调最后一层),计算量减少90%+,无需存储经验回放池(仅存储少量微调样本)。
-
简化经验回放机制:
- 若需嵌入式端在线训练,采用“小型经验池”(如容量100~1000,而非原DQN的1e5),并使用“先进先出(FIFO)”替换PER(优先级经验回放计算复杂);
- 优势:存储开销从几百MB降至几KB,抽样计算量减少80%+。
-
降低动作空间维度:
- 将连续动作离散化(如温度控制从20~30℃离散为24/26/28℃三档),或减少动作数量(如仅保留核心动作);
- 优势:Q网络输出维度降低(如从10维降至3维),推理计算量减少60%+。
4.3.2 模型压缩:减小网络体积与推理功耗
-
量化(Quantization):
- 核心逻辑:将32位浮点数(FP32)参数/激活值转换为16位(FP16)、8位(INT8)甚至4位(INT4)整数,降低内存占用和计算功耗;
- 实践方案:采用TensorFlow Lite或PyTorch Mobile的量化工具,如INT8量化可使模型体积减少75%,推理功耗降低50%+(嵌入式设备整数运算比浮点运算更高效);
- 注意:需进行“量化感知训练(QAT)”,避免量化导致的精度损失(如DQN决策准确率下降不超过5%)。
-
剪枝(Pruning):
- 核心逻辑:移除神经网络中冗余的权重(如接近0的权重)和神经元,保留核心结构;
- 实践方案:采用“结构化剪枝”(如剪枝整个卷积核或通道,而非单个权重),避免非结构化剪枝的不规则计算(嵌入式设备不支持稀疏计算);
- 优势:剪枝后模型参数减少50%~70%,推理速度提升40%+,且精度损失可控(如Atari游戏得分下降<10%)。
-
轻量化网络结构设计:
- 用轻量级神经网络替换原DQN的复杂CNN/MLP,如:
- 卷积层采用MobileNet的“深度可分离卷积”(将标准卷积拆分为深度卷积和点卷积,计算量减少8~9倍);
- 全连接层用“瓶颈层”(如减少神经元数量,从1024降至256);
- 避免使用池化层(计算简单但易丢失细节),改用步长卷积;
- 示例:原DQN用VGG16作为Q网络(参数138M),替换为MobileNetV2(参数3.5M),模型体积减少97%,推理耗时从500ms降至50ms(ARM Cortex-M7平台)。
- 用轻量级神经网络替换原DQN的复杂CNN/MLP,如:
4.3.3 硬件适配:利用嵌入式专用硬件加速
-
选择低功耗AI加速芯片:
- 嵌入式设备搭载专用AI加速模块,如:
- ARM Cortex-M系列的“CMSIS-NN”(专为神经网络优化的软件库,加速INT8推理);
- 低功耗NPU(神经网络处理单元),如瑞萨的DA1470x(集成NPU,INT8推理功耗仅5μA/MHz)、意法半导体的STM32H7(支持硬件浮点运算,加速FP16推理);
- 优势:AI加速硬件可使DQN推理速度提升3~10倍,功耗降低60%+(如Cortex-M7+CMSIS-NN的INT8推理比纯CPU快5倍)。
- 嵌入式设备搭载专用AI加速模块,如:
-
功耗感知的推理调度:
- 根据嵌入式设备的剩余电量动态调整推理频率,如:
- 电量>50%:正常推理(如10次/秒);
- 电量20%~50%:降低推理频率(如5次/秒);
- 电量<20%:仅保留核心决策(如1次/秒);
- 优势:在保证基本功能的前提下,最大化电池续航。
- 根据嵌入式设备的剩余电量动态调整推理频率,如:
五、总结
强化学习以“试错学习”“延迟奖励”“动态交互”为核心特点,通过MDP框架建模智能体与环境的决策过程,按“是否基于模型”“动作空间类型”等维度可分为多类算法,其中DQN作为深度强化学习的经典算法,通过“经验回放”和“目标Q网络”解决了高维状态空间的决策问题。
在嵌入式低功耗场景中,DQN需突破“算力、内存、功耗”三大约束,通过“离线预训练+在线微调”简化算法、“量化/剪枝/轻量网络”压缩模型、“AI加速硬件+功耗调度”适配硬件,最终在智能家居、可穿戴设备、工业IoT等场景实现“智能化决策+低功耗运行”的平衡。