【MCAL实战】CanTrcv模块配置实践
目录
前言
正文
1.硬件分析
2.CanTrcv模块配置
2.1. CanTrcv的RX和Tx引脚配置
2.2. CanTrcvGeneral
2.3.CanTrcvChannel
2.4. CanTrcvDioChannelAccess
3.CanTrcv模块的使用
3.1. 关键API的功能及使用场景
3.2. 状态变量
4.上板测试
4.1. 总体功能测试
4.2. 观测软件状态
4.3. 关键API的使用场景
5.总结
前言
汽车电子嵌入式开始更新全新的AUTOSAR项目实战专栏内容,从0到1搭建一个AUTOSAR工程,内容会覆盖AUTOSAR通信协议栈、存储协议栈、诊断协议栈、MCAL、系统服务、标定、Bootloader、复杂驱动、功能安全等所有常见功能和模块,全网同步更新开发设计文档(后期也会更新视频内容)。本文为MCAL系列配置-CanTrcv模块配置实践。
CanTrcv正常工作是CAN通信正常工作的必要条件,在以下文章中我们详细介绍过各类收发器的细节内容,其中最主要的就CanTrcv用于休眠唤醒时的功能作用,CanTrcv相关的参考文章:
本文作为CanTrcv的基础入门介绍,仅介绍从0到1如何配置一个CanTrcv模块并测试其基本功能。
AUTOSAR BSW Tool:Vector
AUTOSAR MCAL Tool:EB
Hardware Platform: Infineon Tricore TC387
Build Tool: Tasking
Debug Tool: UDE
正文
1.硬件分析
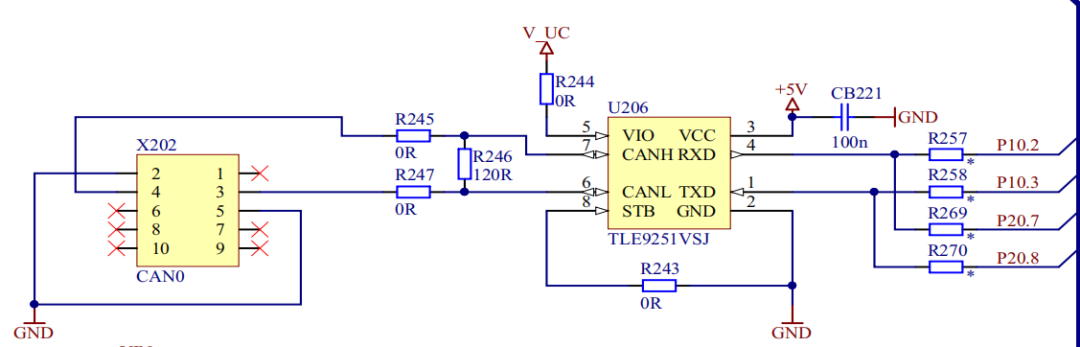
如上图所示,TC387的开发板使用了英飞凌公司自己的收发器TLE9251VSJ(一般常用NXP公司的TJA1044, TJA1043, TJA1145这几个收发器),Pin脚和NXP的TJA1044收发器类似。
VIO和VCC是给芯片供电的,硬件设计上常供电,不需要用户额外控制供电(一般车载量产控制器收发器的供电是可以通过MCU控制的,应该是考虑的ECU的低功耗)。
STB引脚是高有效(原理图上的STB上如果有一个“—”就是低有效,没有“—”就是高有效),开发板直接STB接地(GND),也就是收发器永远是Normal模式(STB有效就是Standby模式),也就是收发器硬件设计上就永远处于正常工作状态。
TXD和RXD和MCU的TXD(Pin20.8)RXD(Pin20.7)直连,CANH和CANL和CAN总线直连。
2.CanTrcv模块配置
2.1. CanTrcv的RX和Tx引脚配置
在《【MCAL实战】Port及Dio模块配置实践》一文中我们详细介绍了CanTrcv的Rx和Tx引脚的Port和Dio模块配置。
2.2. CanTrcvGeneral
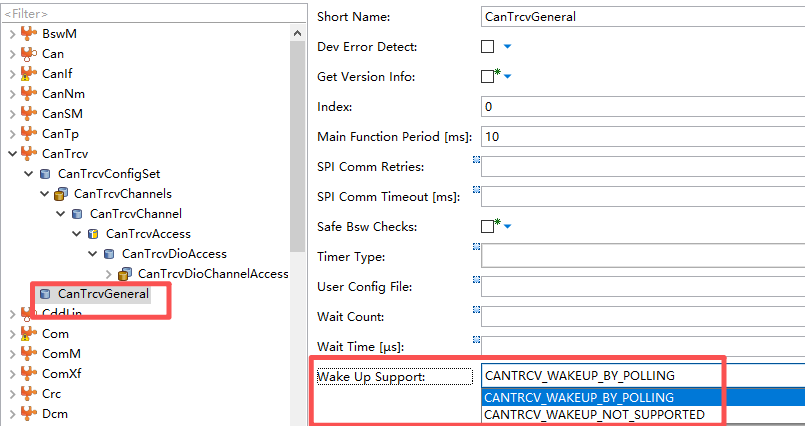
CanTrcvGeneral里面没有特殊需求的时候保持默认配置就行,这里着重介绍几个比较重要(实际项目中会用到)的配置项:
Dev Error Detect: 是否是能Det, 这个参数在项目开发阶段建议勾上,方便我们测试时发现一些低级问题(比如模块没有初始化.e.g.)。
User Config File: 可以配置一个xxx.h文件,工具生成代码的时候会将xxx.h文件中的内容copy到CanTrcv_Cfg.h的最后。通过这个参数可以重映射一些宏定义或者一定函数,在功能安全的函数跨OsApplication中会使用到。可以参考《【经验总结】硬件设计导致Cantrcv静态代码不匹配问题分析及解决方案》一文。
Wake Up Support: 配置CanTrcv模块是否支持唤醒源检测,这个需要根据实际需求配置。CAN的被动唤醒是一个涉及多模块的联动过程,需要一个专题将各个模块串起来讲解才能理解,这里仅将要介绍,深入的相关分析介绍可以参考以下几篇文章:《【CAN通信】AUTOSAR架构下CanTrcv休眠唤醒问题再探》
2.3.CanTrcvChannel
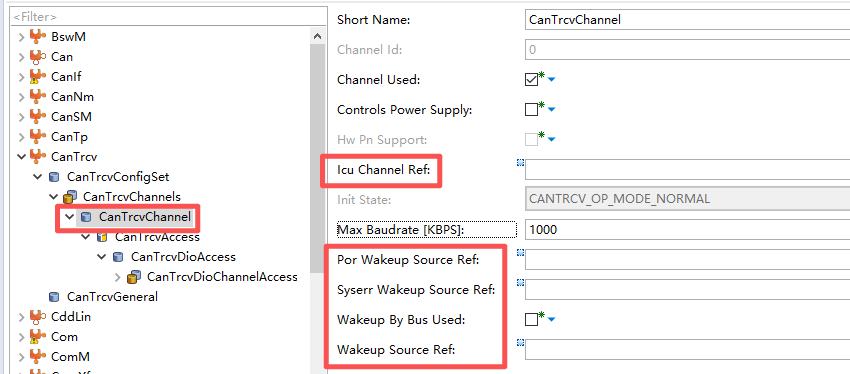
CanTrcvChannel里面没有特殊需求的时候保持默认配置就行,这里着重介绍几个比较重要的配置项:
Icu Channel Ref: CanTrcv模块中的这个参考一般不会用到。但是关于Icu的Ref参数很多模块都会有(CanTrcv, Lin, Can .e.g.)详细的ICU唤醒可以参考《【MCAL】AUTOSAR架构下ICU唤醒详解》一文。
Por Wakeup Source Ref和Syserr Wakeup Source Ref这两个参数在使用IO控制的CanTrcv模块不会用到(引脚也没有这两个唤醒源,TJA1043.e.g.),但是SPI控制的CanTrcv硬件(TJA1145.e.g.)有这两个硬件唤醒事件,需要根据实际需求配置。关于TJA1145的相关功能可以参考《【经验总结】TJA1145异常设置唤醒源导致ECU休眠失败问题分析》。
Wakeup By Bus Used: 配置CAN总线唤醒是否使能。一个CAN阶段的ECU一般都会有一路CAN支持CAN唤醒,根据实际需求配置。
Wakeup Source Ref: 如果这路CAN支持CAN唤醒,这个参数引用一个EcuM模块的唤醒源。CanTrcv检测到唤醒事件收会调用EcuM_SetWakeupEvent通知到EcuM模块,EcuM模块开始唤醒源校验。详细内容可由参考《【Mode Management】AUTOSAR 架构下EcuM唤醒源事件详解》一文。
2.4. CanTrcvDioChannelAccess
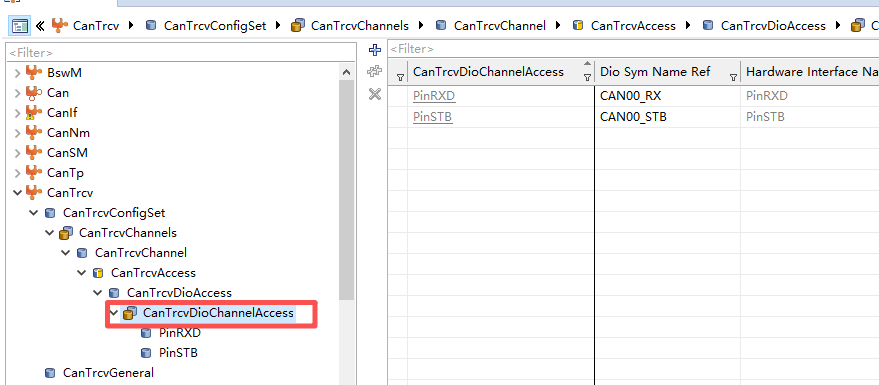
引用我们在DIO模块里面配置的CanTrcv的STB和Rx的Dio Channel就行。CanTrcv模块会使用Dio_ReadChannel和Dio_WriteChannel来读写Cantrcv的Rx/STB硬件。
注意:由1章节可知我们的硬件的STB引脚是引脚直接接地的,实际是无法通过软件控制的。但是为了适配Vector的CanTrcv配置,这里引用的CAN00_STB实际不是CanTrcv的STB引脚引脚。
3.CanTrcv模块的使用
实际项目中User不会直接调用CanTrcv模块的API函数来控制CanTrcv, 都是Can Stack的上层模块调用使用。站在CanTrcv单个模块来看,我们只要知道:
1.CanTrcv模块的关键API的主要功能以及谁在什么场景下会调用即可。
2.CanTrcv在系统启动,运行中,下电过程中应该处于什么逻辑状态即可(关键状态变量)。
3.1. 关键API的功能及使用场景
CanTrcv_Init: 需要用户mapping到EcuM的start sequence中去,在ECU的启动阶段由EcuM调用。
CanTrcv_MainFunction: 需要用户mapping到Os的10ms/其他Task中,Os的10ms任务运行起来后周期调用。
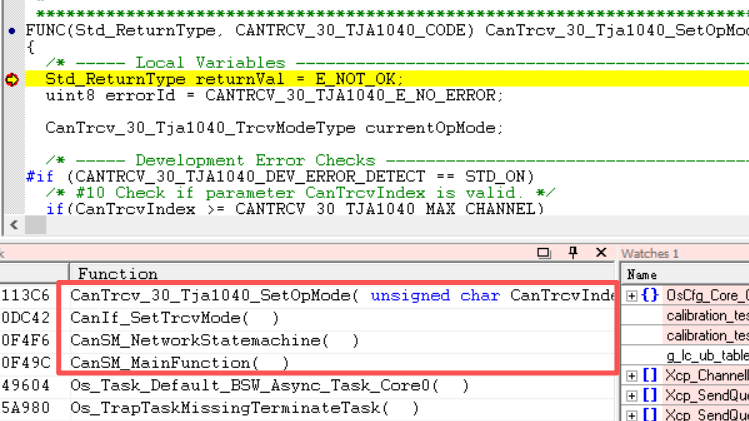
CanTrcv_SetOpMode: ComM的状态切换会trigger CanSM的状态切换,CanSM状态切换后会调用CanIf_SetCanTrcvMode->CanTrcv_SetOpMode来控制CanTrcv切换到Standby, Normal模式。
CanTrcv_CheckWakeup: CanTrcv切换到Standby或者Sleep模式后会调用EcuM_CheckWakeup --> CanIf_CheckWakeup --> CanTrcv_CheckWakeup来检测CAN Bus唤醒事件。具体可以参考《【CAN通信】CanTrcv和EcuM的关系及不同类型的Can收发器主要使用场景》一文。
3.2. 状态变量
Vector的TJA1040 SIP包代码提供了CanTrcv_30_Tja1040_Prob全局变量来观测CanTrcv的内部状态。
/* ! The following type includes CAN transceiver channel specific settings. */
typedef struct
{/* ---- Common attributes ---- *//* ! Last detected wakeup reason */CanTrcv_30_Tja1040_TrcvWakeupReasonType wakeUpReason;/* ! Specifies whether or not to report wakeups */CanTrcv_30_Tja1040_TrcvWakeupModeType wakeUpReport;/* ! HW specific attributes */} CanTrcv_30_Tja1040_Prob_Type;奇怪的是CanTrcv_30_Tja1040_Prob_Type中并没有变量可以观测CanTrcv的逻辑状态。有问题的时候需要我们Debug代码去分析当前CanTrcv软件处于什么逻辑状态。
4.上板测试
4.1. 总体功能测试
CAN报文发送
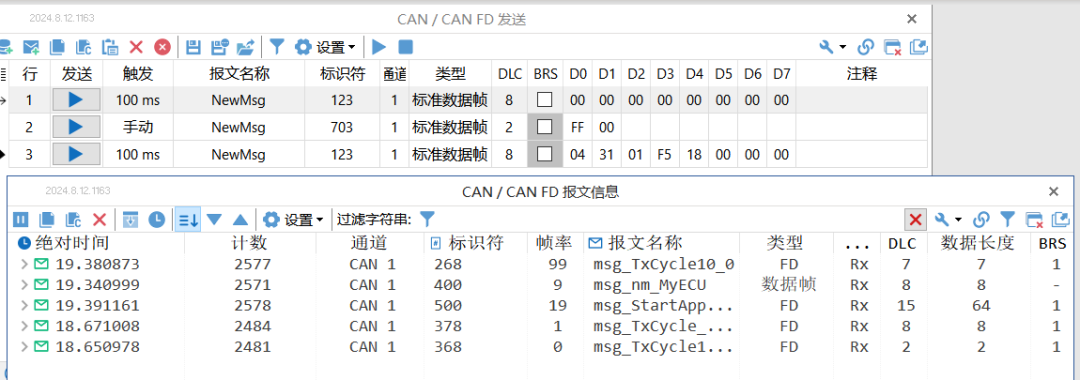
如果Can报文能正常的发送出来,说明我们的CanTrcv(Can Stack)配置的基本没有什么问题。
CAN报文接收
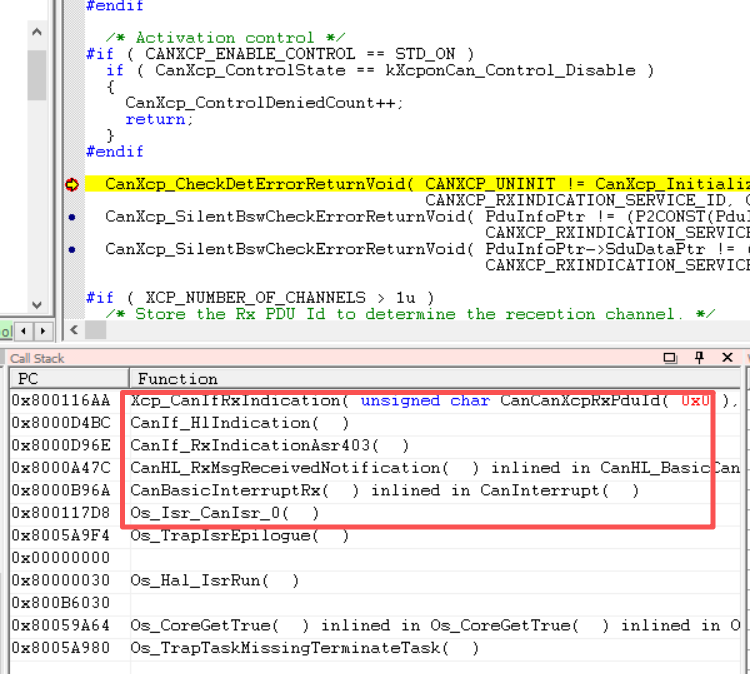
我们发送了一阵XCP报文,XCP模块能正常接收,说明CanTrcv的Rx功能正常。
注意:实际项目中Can的收发中断最接近硬件状态,如果通过上册模块测试不符合预期,可以通过测试CAN的收发中断来验证CanTrcv功能。
4.2. 观测软件状态

4.3. 关键API的使用场景
CanTrcv_CheckWakeupAPI在我们的项目中暂时没有场景触发,CanTrcv_Init和CanTrcv_MainFunction场景比较容易理解,这里不在展示。仅给出CanTrcv_SetOpMode的使用场景。
5.总结
本文是AUTOSAR架构下CanTrcv模块的入门级介绍,较为详细的介绍了如何根据硬件原理图来配置CanTrcv模块以及CanTrcv模块的主要功能和测试方法。虽然CanTrcv模块相对比较容易简单,但是在实际工程项目中你可能还得深入了解以下内容:
1.CanTrcv_TJA1040/CanTrcv_TJA1043/CanTrcv_TJA1145的软硬件是如何配合起来检测唤醒源的?
2.CanTrcv_TJA1040/CanTrcv_TJA1043/CanTrcv_TJA1145三类典型收发器在项目中切换使用(硬件上换芯片)时需要注意什么事项?
3.ECU的CAN Bus唤醒不了或者唤醒时间太慢该怎么分析?
......等很多细节的问题分析起来也不容易,这就需要量产项目的捶打才能明明。或者关注作者会深入分析这一系列的工程实际问题。
最后,本文第三章节提到的CanTrcv模块的使用方法可以触类旁通到其他模块的学习,需要读者自己去体会。