Mujoco 仿真 PPO 强化学习机械臂末端路径规划到达指定位置(代码讲解)
视频讲解:
Mujoco 仿真 PPO 强化学习机械臂末端路径规划到达指定位置(代码讲解)
仓库代码:GitHub - LitchiCheng/mujoco-learning
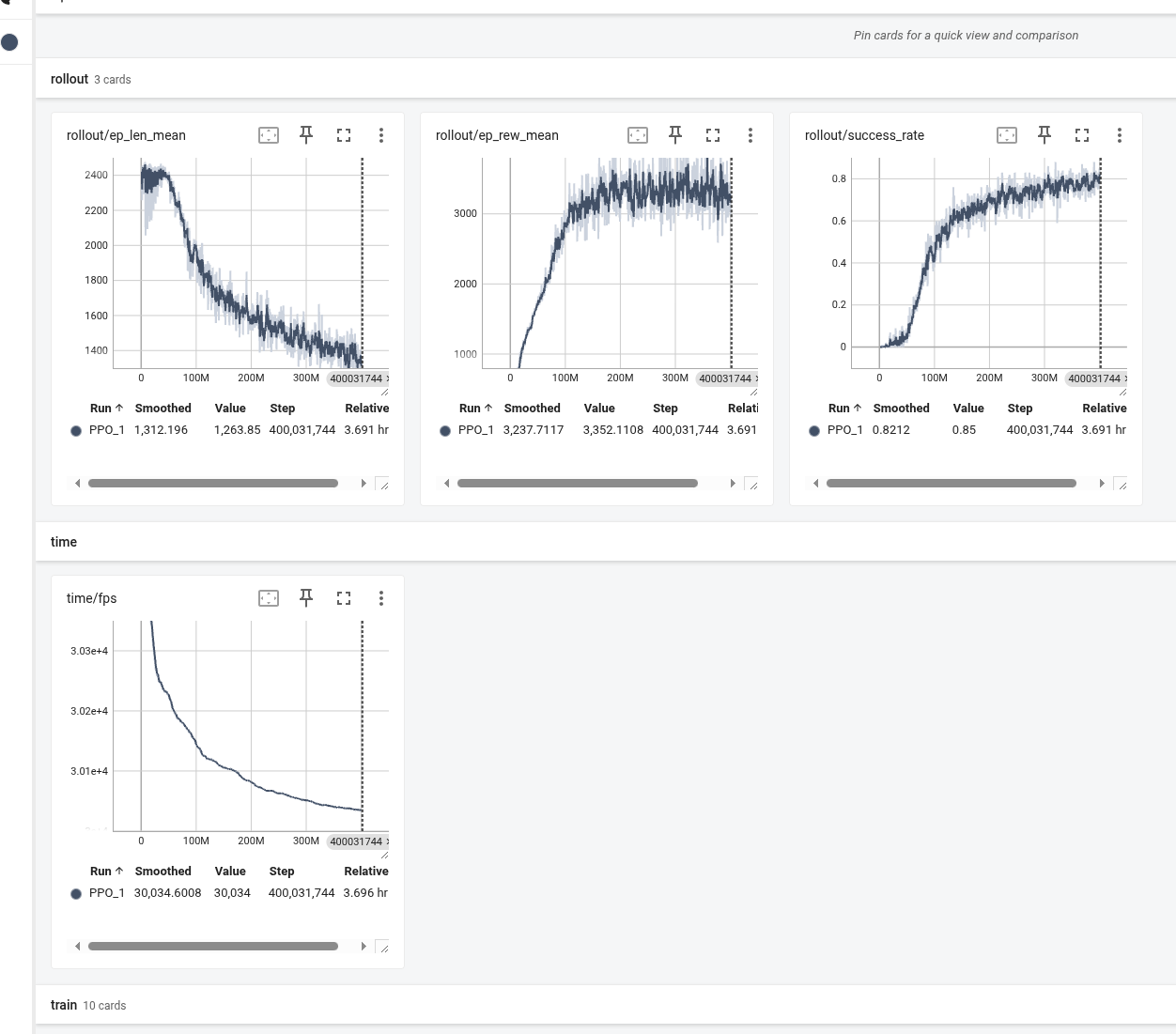
前面做过一期《MuJoCo 机械臂 PPO 强化学习逆向运动学(IK)》,但是没有包含路径规划,在此基础上可以增加难度,让强化学习来帮我们找到一条路径(当然不一定是最优的,条条大路通罗马,要想寻好一条时间、空间都最优的模型,需要不停的微调奖励函数),下面看下4ww次训练后的成功率基本上达到80%,但实际测试下来可以看到路径规划会比较傻,而且到点后会有震荡,这些都是要进一步优化的内容。
PPO 的策略网络和价值网络都使用两层,激活函数选择 ReLU
# 策略网络配置POLICY_KWARGS = dict(activation_fn=nn.ReLU,net_arch=[dict(pi=[256, 128], vf=[256, 128])])# PPO模型model = PPO(policy="MlpPolicy",env=env,policy_kwargs=POLICY_KWARGS,verbose=1,n_steps=2048, batch_size=2048, n_epochs=10, gamma=0.99,learning_rate=3e-4,device="cuda" if torch.cuda.is_available() else "cpu",tensorboard_log="./tensorboard/panda_reach_target/")使用PPO进行强化学习,同时利用前面介绍过的tensorboard可视化训练过程,调整env可以并行训练,实际还是比较快的,主要这个维度不是很大
def _calc_reward(self, ee_pos: np.ndarray, ee_orient: np.ndarray, joint_angles: np.ndarray, action: np.ndarray) -> tuple[np.ndarray, float]:dist_to_goal = np.linalg.norm(ee_pos - self.goal)# 非线性距离奖励if dist_to_goal < self.goal_threshold:distance_reward = 100.0elif dist_to_goal < 2*self.goal_threshold:distance_reward = 50.0elif dist_to_goal < 3*self.goal_threshold:distance_reward = 10.0else:distance_reward = 1.0 / (1.0 + dist_to_goal)# 姿态约束:保持末端朝下target_orient = np.array([0, 0, -1])ee_orient_norm = ee_orient / np.linalg.norm(ee_orient)dot_product = np.dot(ee_orient_norm, target_orient)angle_error = np.arccos(np.clip(dot_product, -1.0, 1.0))orientation_penalty = 0.3 * angle_error# 动作相关惩罚action_diff = action - self.prev_actionsmooth_penalty = 0.1 * np.linalg.norm(action_diff)action_magnitude_penalty = 0.05 * np.linalg.norm(action)contact_reward = 1.0*self.data.ncon# 关节角度限制惩罚joint_penalty = 0.0for i in range(7):min_angle, max_angle = self.model.jnt_range[:7][i]if joint_angles[i] < min_angle:joint_penalty += 0.5 * (min_angle - joint_angles[i])elif joint_angles[i] > max_angle:joint_penalty += 0.5 * (joint_angles[i] - max_angle)# 时间惩罚time_penalty = 0.01# 总奖励计算# total_reward = distance_reward - contact_reward - smooth_penalty - action_magnitude_penalty - joint_penalty - time_penalty - orientation_penaltytotal_reward = distance_reward - contact_reward - smooth_penalty - orientation_penalty # - joint_penalty # - orientation_penalty# print(f"[奖励] 距离目标: {distance_reward:.3f}, [碰撞]: {contact_reward:.3f}, 动作惩罚: {smooth_penalty:.3f}, 姿态: {orientation_penalty:.3f} 总奖励: {total_reward:.3f}")# 更新上一步动作self.prev_action = action.copy()return total_reward, dist_to_goal, angle_error强化学习比较重要的就是奖励函数的设计,按照经验来说,刚开始可以单个环境调整奖励函数来观察是不是前期奖励太稀疏,无法学到规律,通过打印reward观察,也不要一次性上难度,各种约束都加上的话,基本上很难成功,不成功对于规律来说就很难找到,自然无法成功训练,如下是完整代码
import numpy as np
import mujoco
import gym
from gym import spaces
from stable_baselines3 import PPO
from stable_baselines3.common.env_util import make_vec_env
from stable_baselines3.common.vec_env import SubprocVecEnv, DummyVecEnv
import torch.nn as nn
import warnings
import torch
import mujoco.viewer
import random
import time
from typing import Optional
from scipy.spatial.transform import Rotation as R# 忽略stable-baselines3的冗余UserWarning
warnings.filterwarnings("ignore", category=UserWarning, module="stable_baselines3.common.on_policy_algorithm")class PandaObstacleEnv(gym.Env):def __init__(self, visualize: bool = False):super(PandaObstacleEnv, self).__init__()self.visualize = visualizeself.handle = Noneself.model = mujoco.MjModel.from_xml_path('./model/franka_emika_panda/scene.xml')self.data = mujoco.MjData(self.model)if self.visualize:self.handle = mujoco.viewer.launch_passive(self.model, self.data)self.handle.cam.distance = 3.0self.handle.cam.azimuth = 0.0self.handle.cam.elevation = -30.0self.handle.cam.lookat = np.array([0.2, 0.0, 0.4])self.end_effector_id = mujoco.mj_name2id(self.model, mujoco.mjtObj.mjOBJ_BODY, 'ee_center_body')self.initial_ee_pos = np.zeros(3, dtype=np.float32) self.home_joint_pos = np.array([ # home位姿0.0, -np.pi/4, 0.0, -3*np.pi/4, 0.0, np.pi/2, np.pi/4], dtype=np.float32)self.goal_size = 0.03# 约束工作空间self.workspace = {'x': [-0.5, 0.8],'y': [-0.5, 0.5],'z': [0.05, 0.3]}# 动作空间与观测空间self.action_space = spaces.Box(low=-1.0, high=1.0, shape=(7,), dtype=np.float32)# 7轴关节角度、目标位置self.obs_size = 7 + 3self.observation_space = spaces.Box(low=-np.inf, high=np.inf, shape=(self.obs_size,), dtype=np.float32)self.goal = np.zeros(3, dtype=np.float32)self.np_random = np.random.default_rng(None)self.prev_action = np.zeros(7, dtype=np.float32)self.goal_threshold = 0.005def _get_valid_goal(self) -> np.ndarray:"""生成有效目标点"""while True:goal = self.np_random.uniform(low=[self.workspace['x'][0], self.workspace['y'][0], self.workspace['z'][0]],high=[self.workspace['x'][1], self.workspace['y'][1], self.workspace['z'][1]])if 0.4 < np.linalg.norm(goal - self.initial_ee_pos) < 0.5 and goal[0] > 0.2 and goal[2] > 0.2:return goal.astype(np.float32)def _render_scene(self) -> None:"""渲染目标点"""if not self.visualize or self.handle is None:returnself.handle.user_scn.ngeom = 0total_geoms = 1self.handle.user_scn.ngeom = total_geoms# 渲染目标点(蓝色)goal_rgba = np.array([0.1, 0.1, 0.9, 0.9], dtype=np.float32)mujoco.mjv_initGeom(self.handle.user_scn.geoms[0],mujoco.mjtGeom.mjGEOM_SPHERE,size=[self.goal_size, 0.0, 0.0],pos=self.goal,mat=np.eye(3).flatten(),rgba=goal_rgba)def reset(self, seed: Optional[int] = None, options: Optional[dict] = None) -> tuple[np.ndarray, dict]:super().reset(seed=seed)if seed is not None:self.np_random = np.random.default_rng(seed)# 重置关节到home位姿mujoco.mj_resetData(self.model, self.data)self.data.qpos[:7] = self.home_joint_posmujoco.mj_forward(self.model, self.data)self.initial_ee_pos = self.data.body(self.end_effector_id).xpos.copy()# 生成目标和障碍物self.goal = self._get_valid_goal()if self.visualize:self._render_scene() obs = self._get_observation()self.start_t = time.time()return obs, {}def _get_observation(self) -> np.ndarray:joint_pos = self.data.qpos[:7].copy().astype(np.float32)# ee_pos = self.data.body(self.end_effector_id).xpos.copy().astype(np.float32)# ee_quat = self.data.body(self.end_effector_id).xquat.copy().astype(np.float32)return np.concatenate([joint_pos, self.goal])def _calc_reward(self, ee_pos: np.ndarray, ee_orient: np.ndarray, joint_angles: np.ndarray, action: np.ndarray) -> tuple[np.ndarray, float]:dist_to_goal = np.linalg.norm(ee_pos - self.goal)# 非线性距离奖励if dist_to_goal < self.goal_threshold:distance_reward = 100.0elif dist_to_goal < 2*self.goal_threshold:distance_reward = 50.0elif dist_to_goal < 3*self.goal_threshold:distance_reward = 10.0else:distance_reward = 1.0 / (1.0 + dist_to_goal)# 姿态约束:保持末端朝下target_orient = np.array([0, 0, -1])ee_orient_norm = ee_orient / np.linalg.norm(ee_orient)dot_product = np.dot(ee_orient_norm, target_orient)angle_error = np.arccos(np.clip(dot_product, -1.0, 1.0))orientation_penalty = 0.3 * angle_error# 动作相关惩罚action_diff = action - self.prev_actionsmooth_penalty = 0.1 * np.linalg.norm(action_diff)action_magnitude_penalty = 0.05 * np.linalg.norm(action)contact_reward = 1.0*self.data.ncon# 关节角度限制惩罚joint_penalty = 0.0for i in range(7):min_angle, max_angle = self.model.jnt_range[:7][i]if joint_angles[i] < min_angle:joint_penalty += 0.5 * (min_angle - joint_angles[i])elif joint_angles[i] > max_angle:joint_penalty += 0.5 * (joint_angles[i] - max_angle)# 时间惩罚time_penalty = 0.01# 总奖励计算# total_reward = distance_reward - contact_reward - smooth_penalty - action_magnitude_penalty - joint_penalty - time_penalty - orientation_penaltytotal_reward = distance_reward - contact_reward - smooth_penalty - orientation_penalty # - joint_penalty # - orientation_penalty# print(f"[奖励] 距离目标: {distance_reward:.3f}, [碰撞]: {contact_reward:.3f}, 动作惩罚: {smooth_penalty:.3f}, 姿态: {orientation_penalty:.3f} 总奖励: {total_reward:.3f}")# 更新上一步动作self.prev_action = action.copy()return total_reward, dist_to_goal, angle_errordef step(self, action: np.ndarray) -> tuple[np.ndarray, np.float32, bool, bool, dict]:# 动作缩放joint_ranges = self.model.jnt_range[:7]scaled_action = np.zeros(7, dtype=np.float32)for i in range(7):scaled_action[i] = joint_ranges[i][0] + (action[i] + 1) * 0.5 * (joint_ranges[i][1] - joint_ranges[i][0])# 执行动作self.data.qpos[:7] = scaled_actionmujoco.mj_step(self.model, self.data)# 计算奖励与状态ee_pos = self.data.body(self.end_effector_id).xpos.copy()ee_quat = self.data.body(self.end_effector_id).xquat.copy()rot = R.from_quat(ee_quat)ee_quat_euler_rad = rot.as_euler('xyz')reward, dist_to_goal,_ = self._calc_reward(ee_pos, ee_quat_euler_rad, self.data.qpos[:7], action)terminated = Falsecollision = False# 目标达成if dist_to_goal < self.goal_threshold:terminated = True# print(f"[奖励] 距离目标: {dist_to_goal:.3f}, 奖励: {reward:.3f}")if not terminated:if time.time() - self.start_t > 20.0:reward -= 10.0print(f"[超时] 时间过长,奖励减半")terminated = Trueif self.visualize and self.handle is not None:self.handle.sync()time.sleep(0.01) obs = self._get_observation()info = {'is_success': terminated and (dist_to_goal < self.goal_threshold),'distance_to_goal': dist_to_goal,'collision': collision}return obs, reward.astype(np.float32), terminated, False, infodef seed(self, seed: Optional[int] = None) -> list[Optional[int]]:self.np_random = np.random.default_rng(seed)return [seed]def close(self) -> None:if self.visualize and self.handle is not None:self.handle.close()self.handle = Noneprint("环境已关闭,资源释放完成")def train_ppo(n_envs: int = 24,total_timesteps: int = 40_000_000,model_save_path: str = "panda_ppo_reach_target",visualize: bool = False
) -> None:ENV_KWARGS = {'visualize': visualize}# 创建多进程向量环境env = make_vec_env(env_id=lambda: PandaObstacleEnv(**ENV_KWARGS),n_envs=n_envs,seed=42,vec_env_cls=SubprocVecEnv,vec_env_kwargs={"start_method": "fork"})# 策略网络配置POLICY_KWARGS = dict(activation_fn=nn.ReLU,net_arch=[dict(pi=[256, 128], vf=[256, 128])])# PPO模型model = PPO(policy="MlpPolicy",env=env,policy_kwargs=POLICY_KWARGS,verbose=1,n_steps=2048, batch_size=2048, n_epochs=10, gamma=0.99,learning_rate=3e-4,device="cuda" if torch.cuda.is_available() else "cpu",tensorboard_log="./tensorboard/panda_reach_target/")print(f"并行环境数: {n_envs}, 总步数: {total_timesteps}")model.learn(total_timesteps=total_timesteps,progress_bar=True)model.save(model_save_path)env.close()print(f"模型已保存至: {model_save_path}")def test_ppo(model_path: str = "panda_ppo_reach_target",total_episodes: int = 5,
) -> None:env = PandaObstacleEnv(visualize=True)model = PPO.load(model_path, env=env)record_gif = Falseframes = [] if record_gif else Nonerender_scene = None render_context = None pixel_buffer = None viewport = Nonesuccess_count = 0print(f"测试轮数: {total_episodes}")for ep in range(total_episodes):obs, _ = env.reset()done = Falseepisode_reward = 0.0while not done:action, _states = model.predict(obs, deterministic=True)obs, reward, terminated, truncated, info = env.step(action)episode_reward += rewarddone = terminated or truncatedif info['is_success']:success_count += 1print(f"轮次 {ep+1:2d} | 总奖励: {episode_reward:6.2f} | 结果: {'成功' if info['is_success'] else '碰撞/失败'}")success_rate = (success_count / total_episodes) * 100print(f"总成功率: {success_rate:.1f}%")env.close()if __name__ == "__main__":TRAIN_MODE = FalseMODEL_PATH = "panda_ppo_reach_target"if TRAIN_MODE:train_ppo(n_envs=256, total_timesteps=400_000_000,model_save_path=MODEL_PATH,visualize = False)else:test_ppo(model_path=MODEL_PATH,total_episodes=15,)如果大家要重新训练的话,可以TRAIN_MODE改成True即可,只是测试的话,仓库中的 panda_ppo_reach_target.zip 就是目前训练好的模型(但这个肯定要继续优化训练,这里只是一个demo)
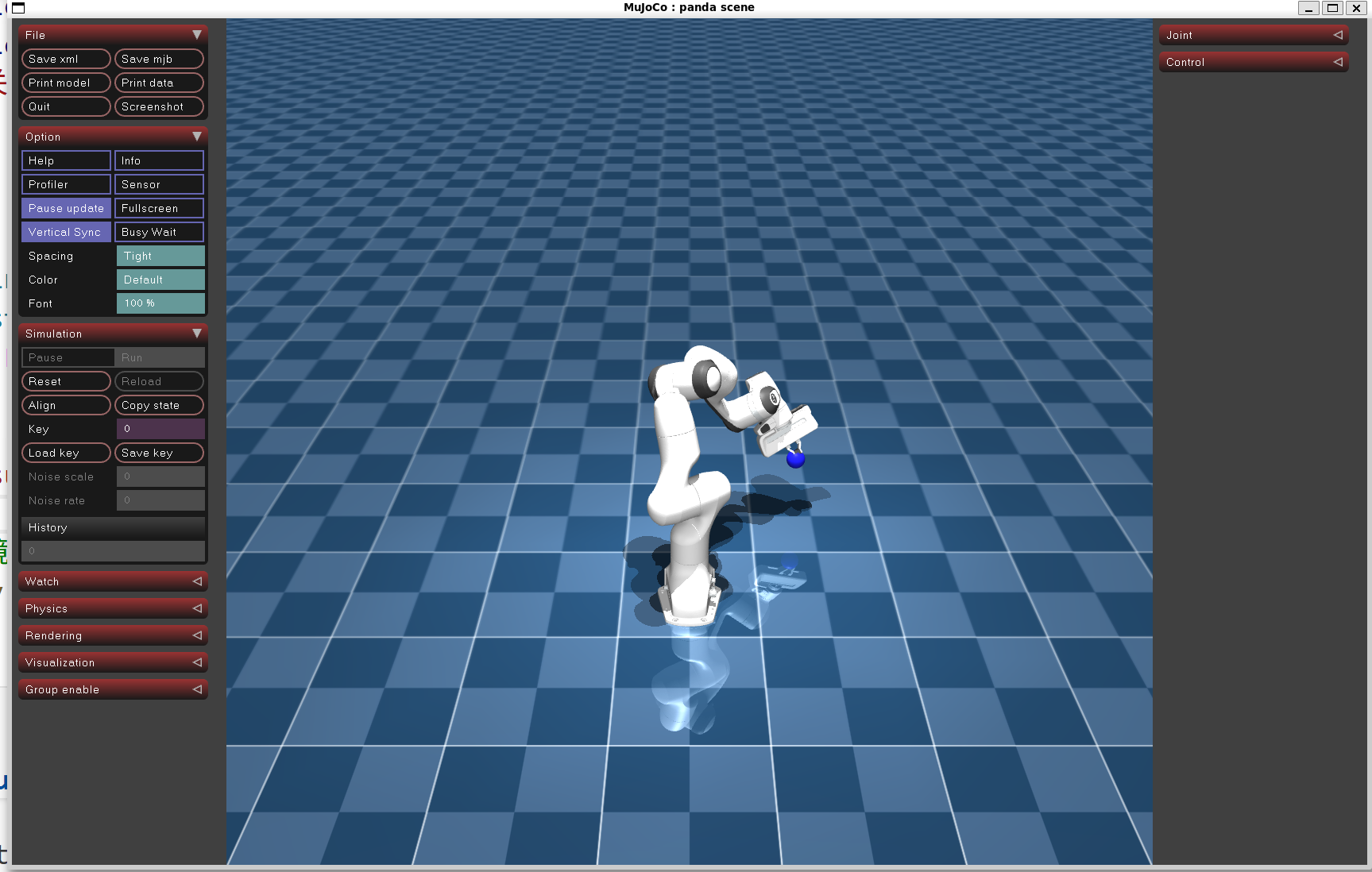
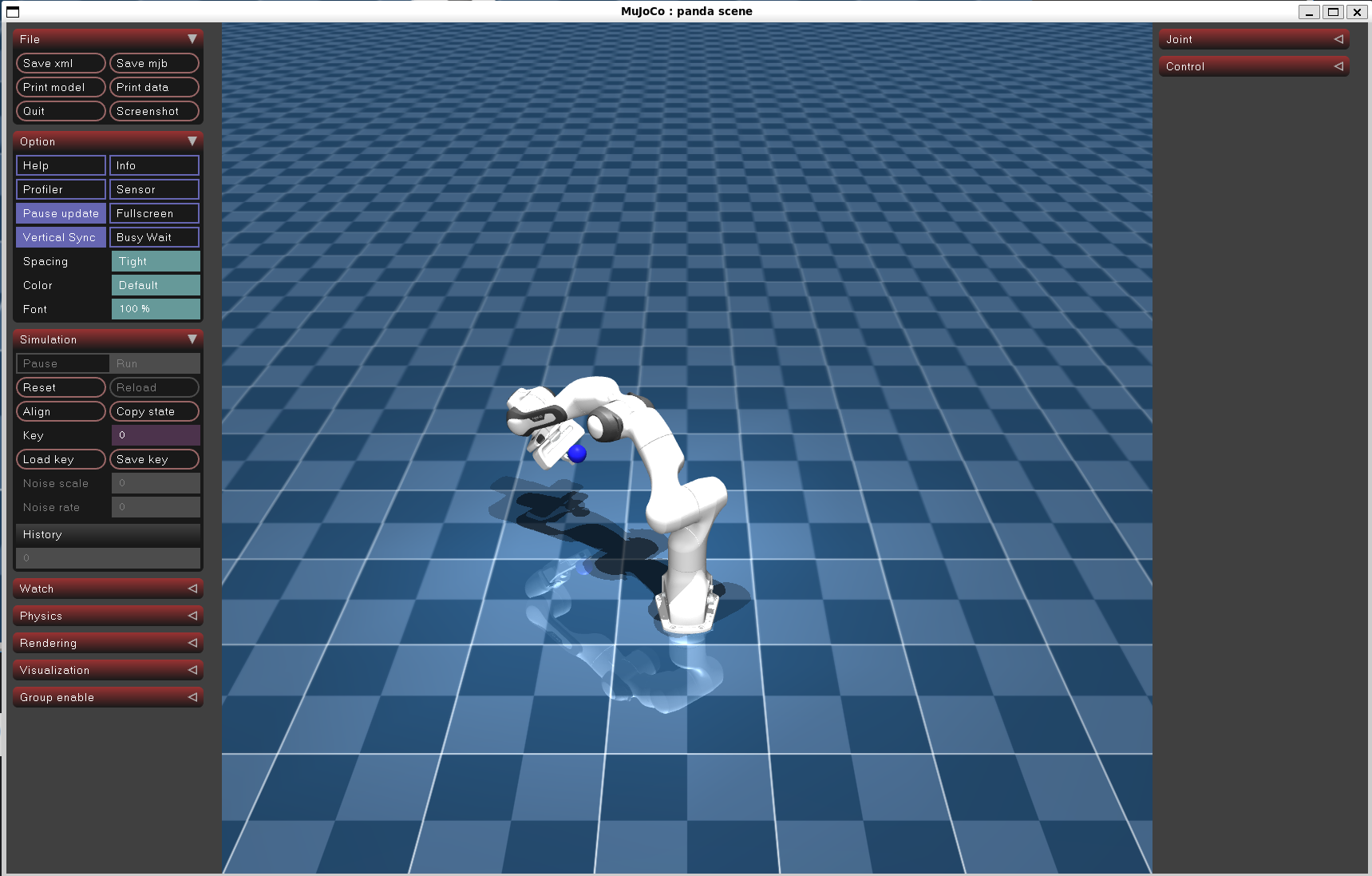
模型如下
![]()