自动驾驶中的传感器技术70——Navigation(7)
本文系统介绍车载GNSS-完好性(Integrity)
1、GNSS的完好性
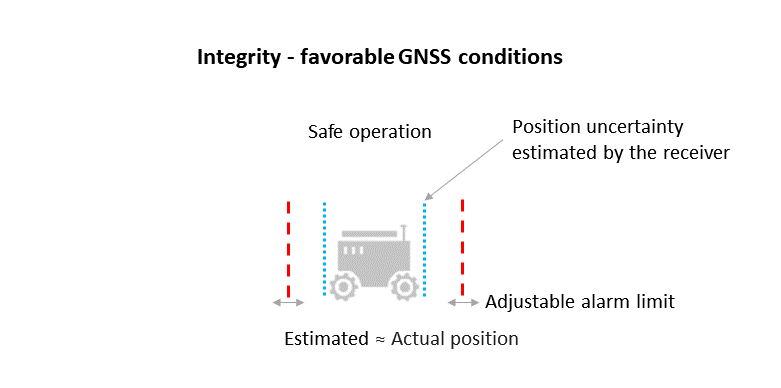
完好性是指 GNSS 在提供定位、导航、授时(PNT)服务时,能够在误差超过预设安全阈值(告警限值,AL)时,及时向用户发出警报的能力。其核心指标包括:
-
完整性风险(Integrity Risk,IR):在单位时间内出现误导信息的概率,定位误差超限而未报警的概率。
-
告警时间(Time To Alert,TTA):误差突破 AL(警报限值)后必须发出的最长期限。
-
保护限(Protection Level,PL):基于观测误差统计得到的置信区间,用于与 AL 比较判断是否安全,用于量化容忍误差的安全阈值
2、功能安全对完好性的需求
按 ISO 26262(功能安全)和 ISO 21448(预期功能安全)划分 ASIL/B‑D 等级,明确 GNSS 完好性在系统安全预算中的容错要求
• 设定行业常用的完整性风险上限 10⁻⁶ /h(对应 ASIL‑D 级别)
• 当监测到风险超过阈值时,立即向上层 ADAS/ADS 发送完整性失效告警,触发安全降级(如转入 L2‑L3 受限模式)
Ref:功能安全性与完整性对汽车定位解决方案的重要性_易车
3、完好性提升
• RAIM(Receiver Autonomous Integrity Monitoring)和其进阶版 ARAIM,利用冗余观测检测卫星、信号或接收机故障
• 多频、多星座冗余提升观测数,降低误差概率
• 多路径、信号强度、伪距残差等阈值过滤
• SBAS/GBAS(如 EGNOS、MSAS、北斗 BDS‑SBAS)提供实时差分校正与完整性信息
• RTK/PPP+网络基准站(如 FOCALPOINT、Swift)实现厘米级定位并输出完整性风险(≤10⁻⁶ /h)
• 将 GNSS 与 IMU、车轮速计、摄像头、LiDAR 等传感器进行卡尔曼/因子图融合,利用惯导在 GNSS 暂失或完整性受损时保持定位连续性
-
实际落地的技术路径叉验证,若 GNSS 完好性报警则自动切换至 GNSS‑INS 或纯感知定位
Ref:GNSS自主完好性監測技術精解:RAIM與ARAIM原理、實現挑戰與驗證
4、实际落地的技术路径
硬件层
-
采用多频(L1/L2/L5)多星座(GPS、GLONASS、BeiDou、Galileo)GNSS 接收机,具备内置 RAIM/ARAIM 功能。
-
配置高性能 IMU 与车速计,实现 GNSS‑INS 紧耦合。
软件层
-
在定位引擎中实现 RAIM/ARAIM,实时计算完整性风险并输出 PL/AL。
-
接入 RTK/PPP 差分服务(如 FOCALPOINT Skylark、Swift Starling),获取厘米级校正并同步完整性参数。
-
融合感知层(摄像头、LiDAR)进行位置校验,若 GNSS 完好性报警则切换至感知‑惯导定位。
系统层
-
按 ISO 26262/21448 进行安全需求分配,定义 GNSS 完好性失效时的安全策略(如降级至 L2‑L3、触发紧急制动)。
-
实施完整性监测日志与远程诊断,支持 OTA 更新改进算法。
验证层
-
通过 HIL/SIL 场景库(城市峡谷、隧道、强电磁干扰)验证完整性风险 ≤10⁻⁶ /h。
-
实车路测累计 10⁶ km 以上,统计完整性失效次数,确保符合安全目标。
小结
-
硬件冗余(多频多星座)+ 算法冗余(RAIM/ARAIM)
-
外部增强(SBAS/GBAS、RTK/PPP)提供实时完整性信息
-
传感器融合(GNSS‑INS‑感知)实现失效切换
-
标准化安全流程(ISO 26262、ISO 21448)确保风险量化与安全降级
-
严格验证(HIL/SIL、实车路测)验证完整性风险满足 10⁻⁶ /h 级别