Dexmal原力灵机发布Dexbotic,从此具身智能研发有了“加速器”
【导读】为解决具身智能研发“重复造轮子”的困境,Dexmal原力灵机正式开源一站式VLA工具箱Dexbotic,致力于成为推动领域创新与协作的标准化基建。
作者 | 小葳
在具身智能浪潮奔涌的今天,视觉-语言-动作模型(VLA)已成为实现机器人感知、认知与行动一体化的关键技术。然而,该领域研究长期面临算法框架分散、流程不统一、实验复现困难等痛点,导致研发人员大量精力耗费在“重复造轮子”上,严重阻碍了技术迭代与产业落地。
为应对这一行业挑战,Dexmal原力灵机正式推出基于PyTorch的开源VLA模型工具箱Dexbotic。它以“代码库 + 预训练模型”为双引擎,构建起标准化的研发基座,通过“以实验为中心”的设计理念,推动具身智能研发从零散探索走向生态协作。
Dexbotic发布
直击具身智能研发四大痛点
根据《2025人形机器人与具身智能产业研究报告》数据,2025年,全球具身智能市场规模预计达195.25亿元,2030年预计达2326.3亿元,复合年增长率达64.18%。
然而行业繁荣的背后,是研发路径中的重重困境。具体而言,具身智能研发面临以下四大痛点:
1. 技术研发分散化,缺乏统一标准
研究人员基于不同的深度学习框架与模型结构各自为战,形成“碎片化”开发生态。硬件接口、通信协议、数据格式缺乏统一规范,很多开发者需要从零搭建基础设施,同时技术路线碎片化严重制约产业生态协同发展。
2. 实验流程繁琐,评测对比困难
由于算法依赖不同的环境配置与数据格式,研究人员在对比模型性能时,需反复搭建多套实验流程,耗费大量人力与算力。更严峻的是,数据格式不统一也导致跨数据集任务逻辑难以衔接,加剧了数据整合与实验复现的难度。
3. 算法复现公平性难以保证
在现有模式下,很难确保每一个对比算法都被调至最优状态,影响技术路线的客观判断与有效迭代。
4. VLA模型未能充分受益于前沿进展
不少VLA模型仍基于过时、不同期的视觉-语言模型(VLM)构建,难以吸收VLM在语义理解、多模态对齐等方面的最新突破。这导致VLA模型在开放世界的泛化能力和推理性能受限,无法与前沿技术同步。
此外,随着具身智能加速走进现实世界,研究者需要同步在主流仿真器+真机上测试从而实现巨大增益,这对现有研发模式提出更大挑战。
正是洞察到以上行业瓶颈,开源VLA工具箱Dexbotic应运而生。其核心设计理念在于通过“代码库+预训练模型”双引擎,通过模块化设计与实验为中心的工作流,致力于打造具身智能研究的“通用底座”。从而将开发者从繁琐的环境配置与算法复现中解放出来,使其更专注于模型调优与算法创新。
Dexbotic:重塑具身智能研发流程
在具身智能研发日益复杂、工具链分散的背景下,Dexbotic致力于打造一套标准化、模块化、高性能的一站式开发解决方案。
- 三大核心模块:构建统一研发基座
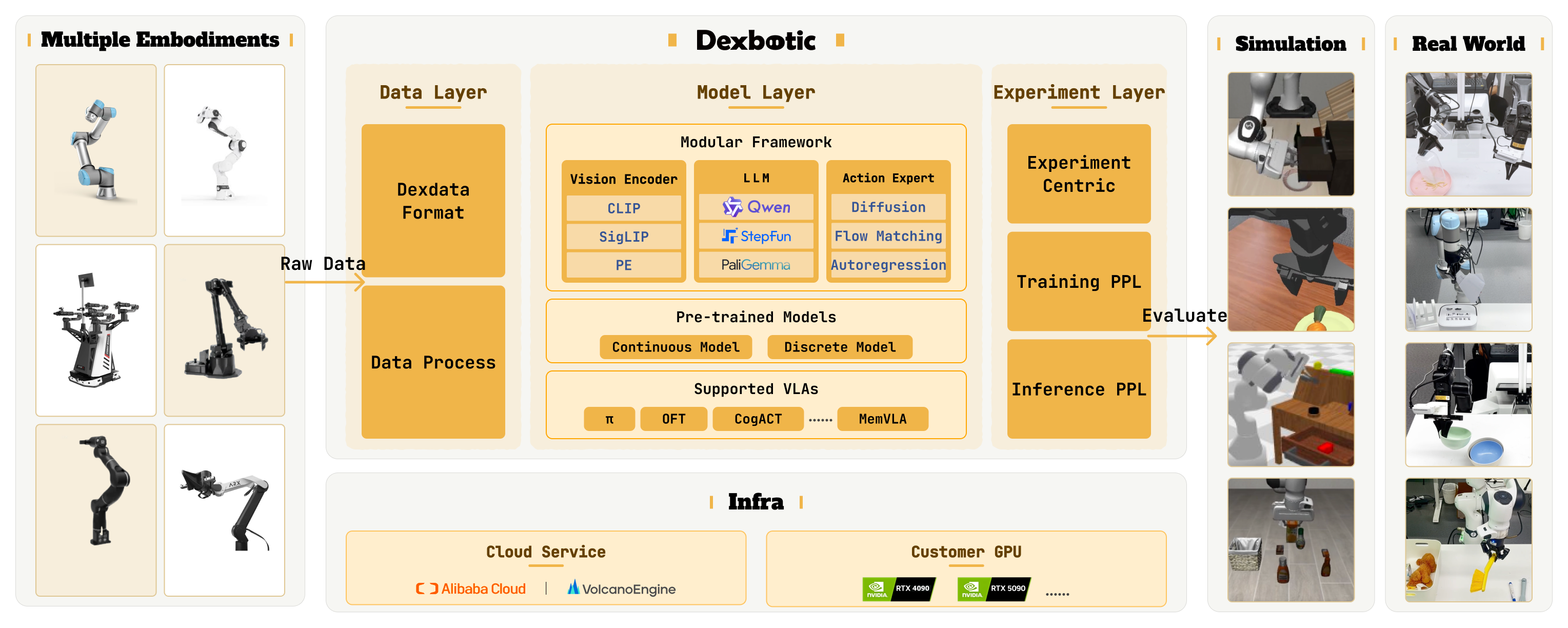
Dexbotic 的整体架构围绕三大层级展开,分别对应数据处理、模型构建与实验管理,形成闭环研发链路:
数据层定义Dexdata统一数据格式,整合多源异构数据,显著优化存储效率。数据层采用Dexdata统一格式来融合多源数据并优化存储;符合该格式的数据将自动进入处理流程,为模型训练提取出图像、文本及状态信息。
模型层以DexboticVLM基础模型为核心,支撑多样化VLA策略的开发。它既可直接用于离散VLA训练,也能作为现有策略的基座;当前已集成Pi0、OpenVLA-OFT等多种策略,并支持用户便捷地自定义新模型。
实验层是Dexbotic的核心,它基于模型层的VLA实现,通过创新的实验脚本机制,使用户仅需修改少量配置即可快速启动新实验,从而在保障系统稳定的前提下实现高效迭代。
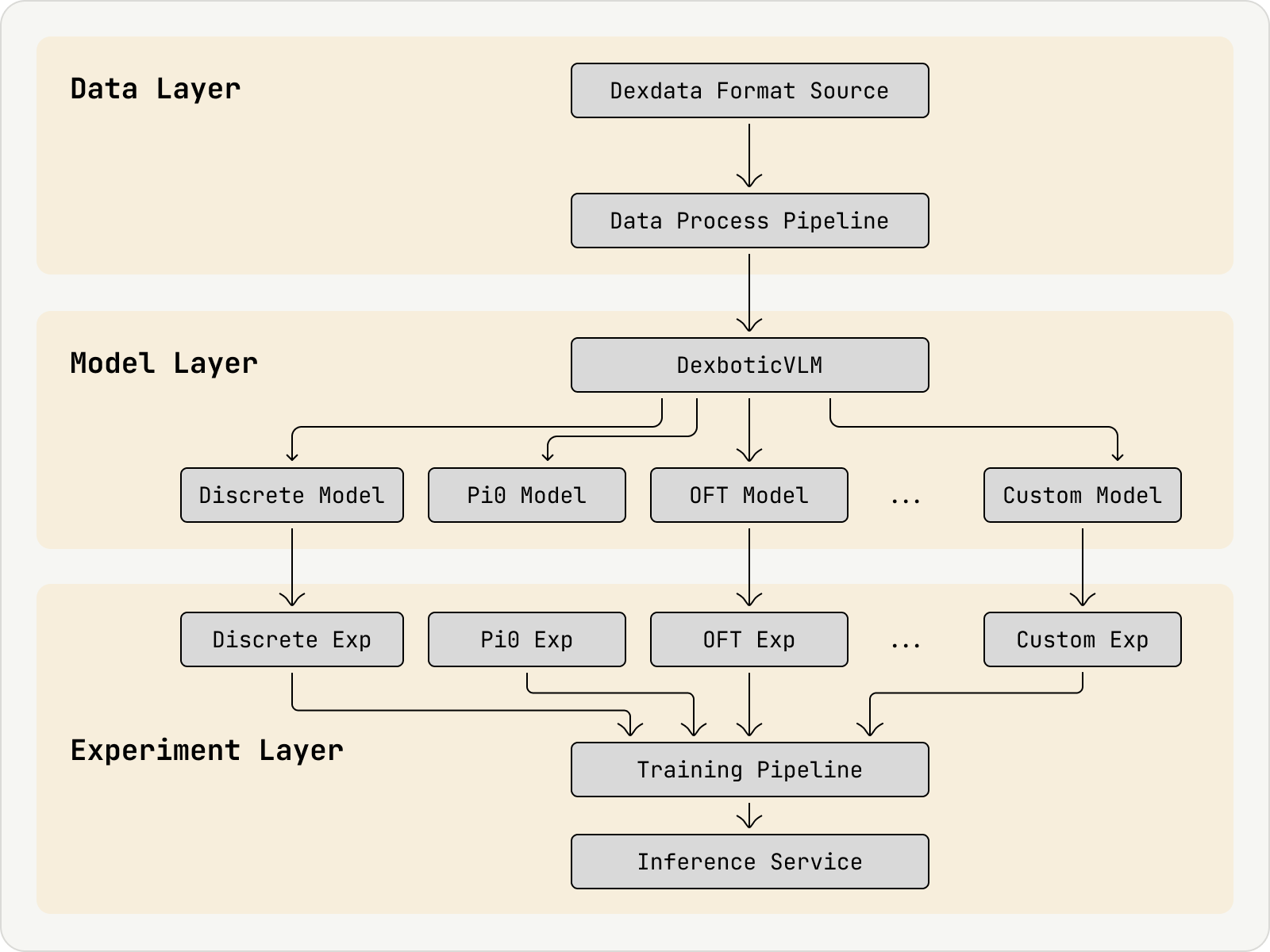
Dexbotic整体架构
- 五大特征:从开发到部署的全链路支持
Dexbotic 具备五大核心优势,构建从开发到部署的完整机器人智能体支持体系。相比现有开源方案,其在框架设计、模型性能、实验效率、训练兼容性与落地能力方面表现突出:
1. 统一的模块化VLA框架
以视觉语言动作模型为核心,兼容主流大语言模型接口,集成具身操作与导航模块,并预留扩展能力,为未来实现全身控制等复杂任务场景奠定架构基础。
2. 高性能预训练基础模型
针对Pi0、CogACT等主流算法,提供多个在仿真与真实任务中表现更优的预训练模型。这些模型为用户提供了更高的起点与可靠的性能基准,有效降低训练成本。
3. 实验导向型开发框架
采用“分层配置 + 工厂注册 + 入口分发”的系统架构,符合软件开闭原则,在保障系统稳定的同时,赋予框架高度灵活性,支持用户快速切换任务、模型与参数,实现高效实验迭代。
4. 云端与本地一体化训练
全面适配多样化研发环境,既支持阿里云、火山引擎等云平台的大规模分布式训练,也能在搭载RTX 4090等消费级显卡的本地机器上高效运行,为用户提供灵活的资源选择。
5. 全链路训练与部署支持
针对UR5、Franka、ALOHA等主流机器人平台,提供标准化的数据接口与通用部署脚本,覆盖从仿真验证到真实机器人无缝落地的完整流程,打通研发测试“最后一公里”。
此外,相较于 LeRobot 基于 YAML 配置的传统方式,Dexbotic 进一步采用了基于 Python Exp 脚本的实验配置机制。这种方式不仅更贴近开发者的编程习惯,也使得参数调试、实验复现和版本管理更加直观高效。
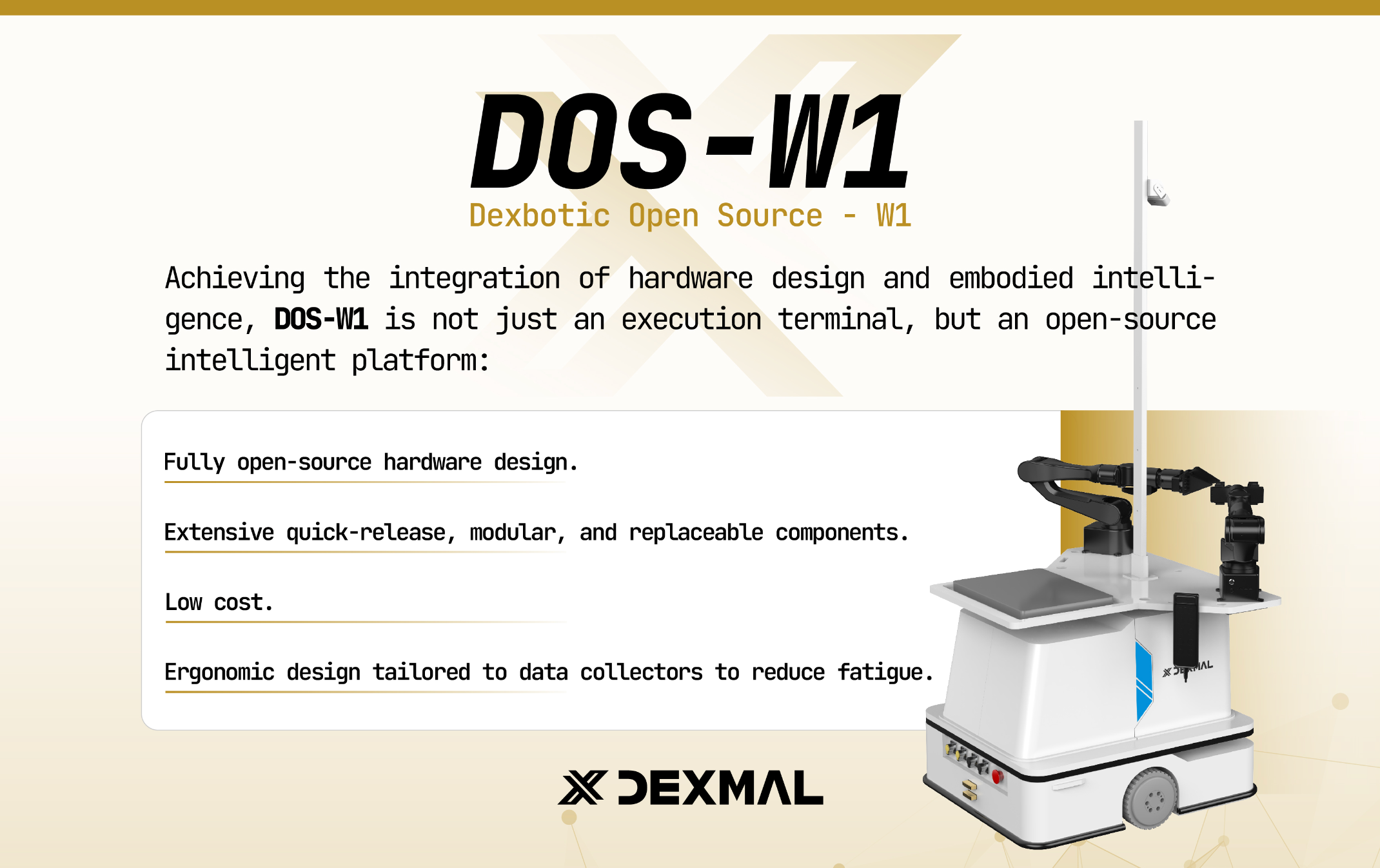
为加速机器人技术在真实物理世界的落地与应用,Dexmal 原力灵机还发布其首款开源硬件产品——Dexbotic Open Source - W1 (DOS-W1)。
该产品秉承完全开源的理念,将公开所有技术文档、BOM清单、设计图纸、组装方案及相关代码。设计上大量采用快拆结构与可替换模块,大幅提升了改造与维护的便捷性。同时,其符合人体工学的抗疲劳设计,也有效改善了操作舒适度与数据采集效率。
从模拟到现实:Dexbotic 大幅提升预训练模型综合性能
Dexbotic 通过增强模型表征与优化训练流程,在多个主流模拟基准与真实场景中均展现出显著性能提升,验证了其出色的适应性与泛化能力。
在SimplerEnv、CALVIN、RoboTwin2.0、Libero、ManiSkill2等多项模拟基准测试中,Dexbotic 均展示出强大的表征能力。
以 SimplerEnv 为例,实验显示在使用 Dexbotic 工具集后,DB-CogACT 模型相较原版 CogACT 性能提升 18.2%;与官方 OpenVLA-OFT 相比,DB-OFT 性能提升达 46.2%,充分说明 Dexbotic 预训练模型具备更强的任务理解与完成表现。
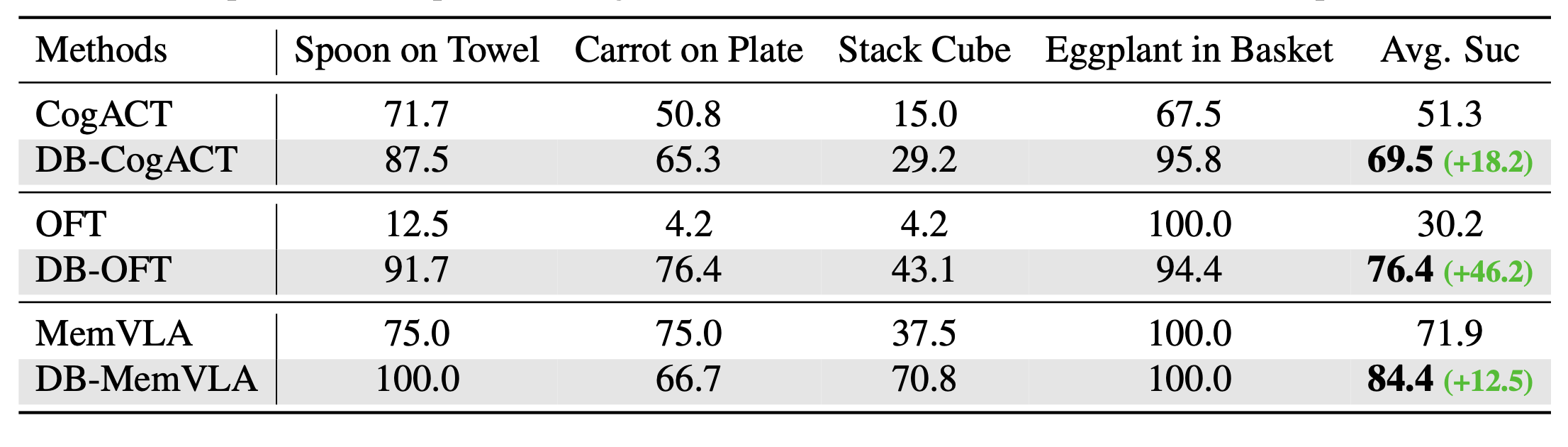
SimplerEnv-Bridge 与 WidowX 机器人在最新策略和 Dexbotic 版本之间的性能比较
在涵盖50项双臂任务的 RoboTwin2.0 基准测试中,Dexbotic 同样表现优异。通过选取“调整瓶子”“抓取滚轮”“放置空杯”和“放置手机支架”四项任务进行对比,CogACT 的平均成功率为 43.75%,而 DB-CogACT 提升至 57.00%,绝对增益达 13%,进一步证明 Dexbotic 在复杂双臂操作中的有效性。

RoboTwin2.0 中四项任务中最新策略与其 Dexbotic 版本之间的性能比较
Libero基准包含四大任务套件,覆盖空间理解与目标导向行为等高阶能力。在该测试中,主流VLA策略性能已接近饱和。然而,引入 Dexbotic 预训练模型后,如 CogACT 与 MemoryVLA 等策略仍能实现性能突破,DB-CogACT 在四个任务套件上的平均成功率较基线提升 1.3%,体现出 Dexbotic 在成熟模型性能方面的优化潜力。
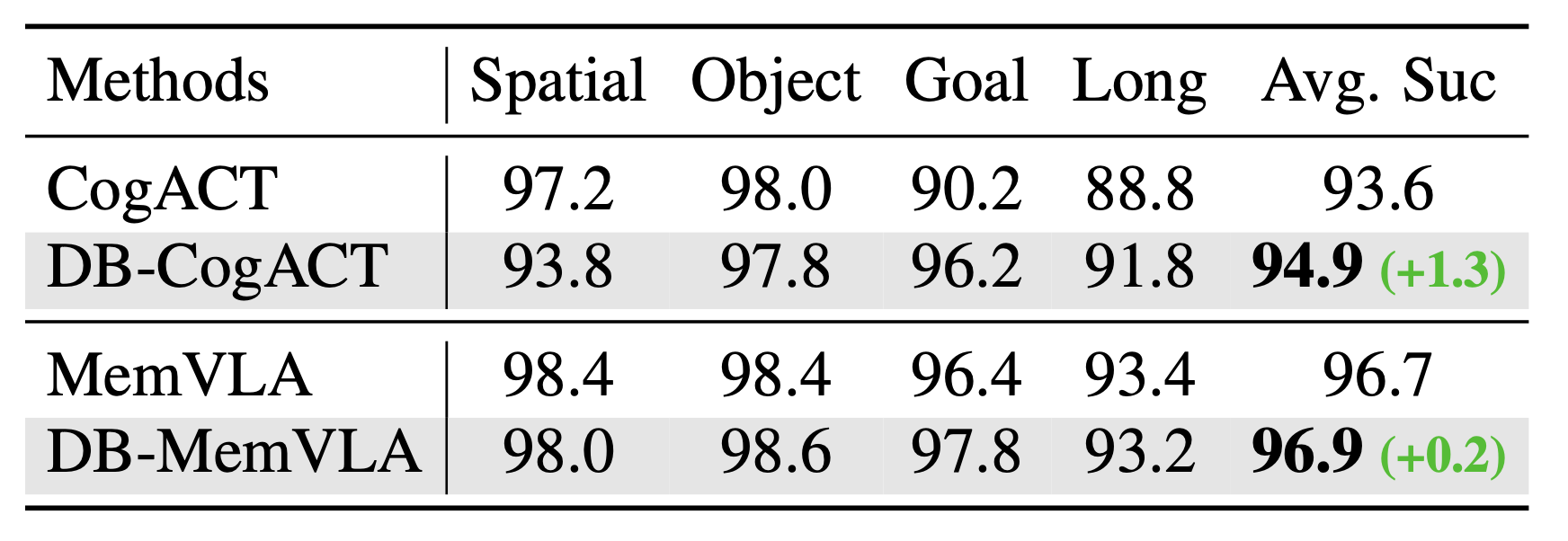
Libero 上最先进的策略与其 Dexbotic 版本之间的性能比较
为验证模型在真实环境中的表现,研究人员在 UR5e、ALOHA、ARX5 和 Franka 等多种机器人平台上,通过远程操作收集了涵盖日常任务的真实数据。每个任务根据难度收集 500–1000 条演示,并统一转换为 Dexdata 格式,用于基于预训练模型的微调。
实验结果表明,Dexbotic 能够稳定完成多种日常操作任务。例如,在“摆放盘子”和“搜索绿盒子”任务中,成功率分别达到 100% 与 80%;在“撕碎废纸”和“将薯条倒入盘子”等需要细粒度操作的任务中,也展现出良好的控制精度与鲁棒性。
ur5摆放盘子真机测试_4x
aloha_倒薯条真机测试_2x
综上,Dexbotic 不仅在模拟测试中显著提升多项基线模型的性能,在真机环境和复杂任务中也表现出优异的泛化能力与实操稳定性,充分证明其作为预训练增强框架的价值与广泛适用前景。
协同共赢:共建具身智能开放生态
Dexbotic的发布,标志着具身智能研发从“分散探索”走向“基础设施驱动”的关键转折。它致力于构建统一、开放、可复现的研发基座,重塑从学术创新到产业落地的全链路协作方式,推动领域实现规模化发展。
一、建立标准:从“各自为战”到“统一基建”
Dexbotic通过标准化框架与高性能预训练模型,为创业团队与中小厂商提供了可媲美大厂的研发起点,显著降低技术门槛与试错成本。在具身智能这一万亿级赛道中,此类开源基础设施的战略意义尤为凸显——它使创新重心从“重复造轮子”回归至算法突破与场景深化。
二、赋能产业:从“技术黑盒”到“可信评估”
在落地层面,Dexbotic为企业与投资机构提供了跨模型可比的评估体系,能够系统化衡量算法在鲁棒性、泛化能力与执行效率等方面的表现。这为技术选型、产品规划与投资决策提供了客观、透明的依据,有效降低因技术不透明所带来的风险,推动行业从“封闭优化”走向“开放竞争”。
三、生态闭环:从“工具开源”到“共同体共建”
Dexbotic不仅仅是开源工具,更构建了一个连接全球开发者与机构的协同网络。其开源机制将吸引顶尖团队共同参与,围绕具身智能的核心挑战展开协作,形成技术共研、成果共享的良性生态。
更具战略价值的是,Dexbotic与全球首个基于真机的具身智能评测平台RoboChallenge形成深度协同。研究者基于Dexbotic开发的模型,可在RoboChallenge这一全球性真实机器人测试平台上进行公平、透明的性能验证,从基础设施层面构建从“开发-训练-评测”的完整技术闭环。
结语:基础设施推动研发范式转移
Dexbotic的推出,是具身智能从技术探索走向规模化商业落地的关键节点。它通过构建标准、开放、高效的研发体系,让全球研究者站在同一起跑线,推动领域从“重复造轮子”走向“协同创新”。
当工具不再成为障碍,当评测有了共同标尺,创新才能真正跨越实验室,走向千行百业。Dexbotic正是这一场“协同革命”的基石,它不只是一个工具箱,更是推动领域协作、加速行业共进的关键引擎。
END
参考资料:
官网:https://dexbotic.com/
Paper:https://dexbotic.com/dexbotic_tech_report.pdf
GitHub:https://github.com/Dexmal/dexbotic
Hugging Face:https://huggingface.co/collections/Dexmal/dexbotic-68f20493f6808a776bfc9fc4