【论文精度-3】POMO:强化学习中具有多个最优解的策略优化方法(Yeong-Dae Kwon 2020)
论文地址:
https://arxiv.org/abs/2010.16011![]() https://arxiv.org/abs/2010.16011代码地址:
https://arxiv.org/abs/2010.16011代码地址:
https://github.com/yd-kwon/POMO![]() https://github.com/yd-kwon/POMO
https://github.com/yd-kwon/POMO
这篇论文《POMO: Policy Optimization with Multiple Optima for Reinforcement Learning》是三星 SDS 团队在 2020 年 NeurIPS 上发表的一篇工作,主要针对组合优化(Combinatorial Optimization, CO)问题的深度强化学习(Deep Reinforcement Learning, DRL)求解方法进行了改进。
🧩 一、研究背景与问题动机
组合优化问题(如旅行商问题 TSP、车辆路径问题 CVRP、背包问题 KP)在物流、制造、调度等领域广泛存在。这类问题往往是 NP-hard 的,传统运筹优化算法(如启发式搜索、分支限界等)需要大量领域知识和人工设计。
近年来,强化学习(RL)在此类问题上表现出很强潜力,但现有方法(如 Pointer Network + REINFORCE、Attention Model 等)仍存在以下问题:
-
存在多个等价最优解(symmetry)
例如在 TSP 中,路径(v1, v2, v3, v4, v5)和(v2, v3, v4, v5, v1)表示相同的最优解,但传统训练仅学习其中一种表示,容易导致模型收敛到局部最优。 -
高方差梯度与训练不稳定
基于 REINFORCE 的方法依赖单一基线(baseline),方差大、收敛慢。 -
推理阶段效率与精度权衡
通常使用采样(sampling)或贪心(greedy)推理,但采样法慢、贪心法不稳定。
🚀 二、POMO 方法核心思想
POMO(Policy Optimization with Multiple Optima)的关键创新是:
在训练与推理阶段同时利用“多个等价最优解”的对称性信息,从多个起点并行优化策略。
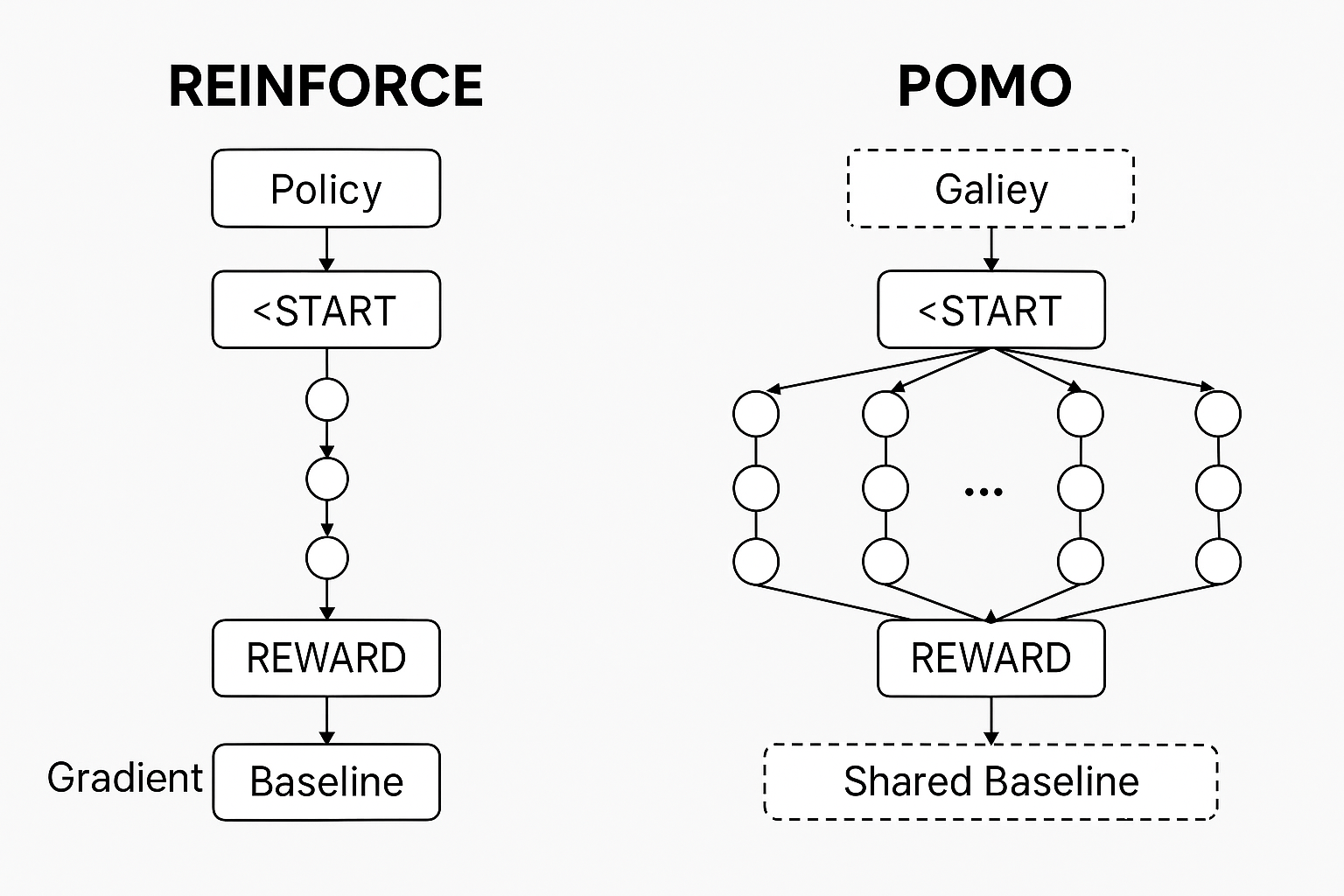
(1)多起点并行探索(Explorations from Multiple Starting Nodes)
传统模型通过一个 <START> token 生成单一路径;
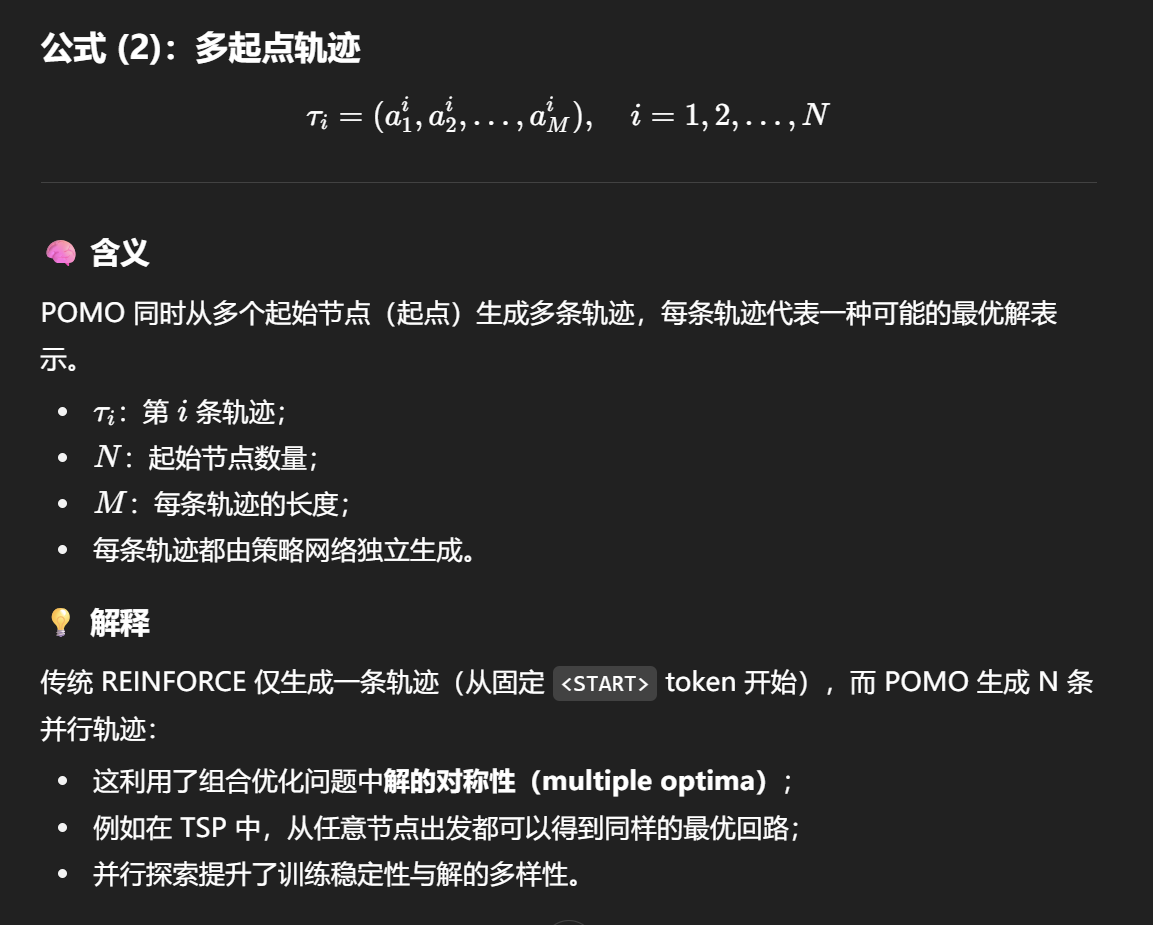
POMO 则从 N 个不同起始节点 同时生成 N 条轨迹(trajectory)。
-
每个轨迹对应一种最优解的等价表示;
-
所有轨迹并行参与梯度更新;
-
通过“多视角学习”提升探索性与稳定性。
这相当于让模型从多个角度理解问题结构,避免只偏向单一路径。
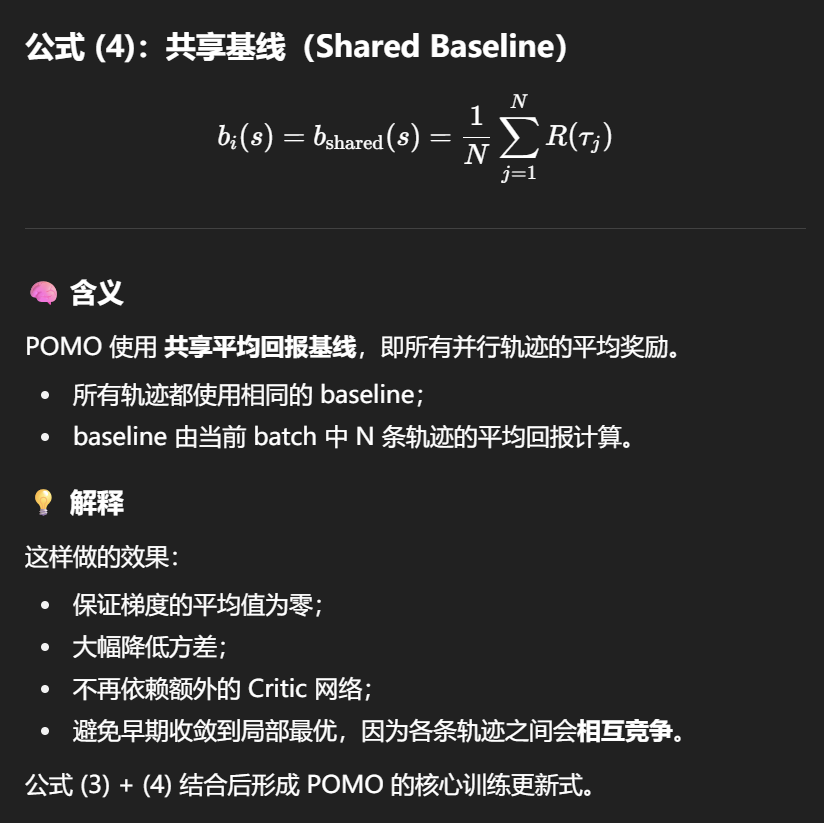
(2)共享基线(Shared Baseline)以降低方差
POMO 基于 REINFORCE,但采用了共享基线(shared baseline):
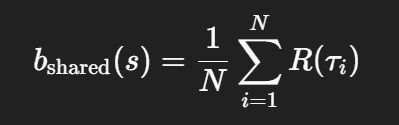
即所有 N 条轨迹的平均回报作为基线。
优点:
-
方差更小,梯度估计更稳定;
-
不依赖单独的 Critic 网络;
-
避免陷入局部最优(local minima)。
这相比传统的 greedy-rollout baseline 更快收敛、对初始化敏感性低。
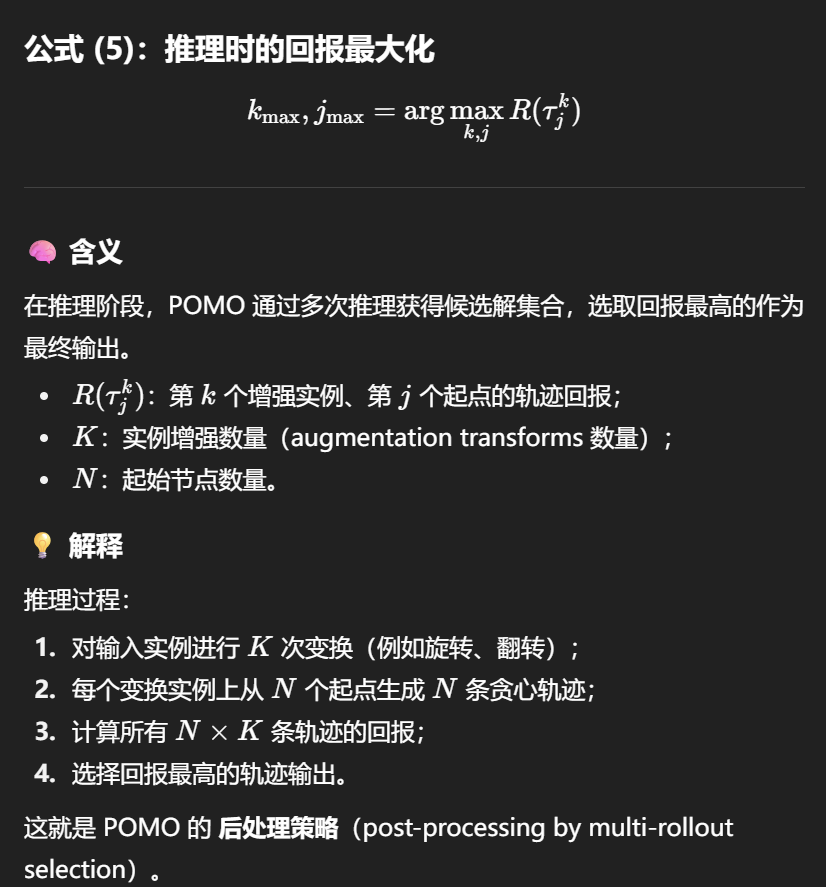
(3)推理阶段:多贪心轨迹与实例增强(Inference with Multiple Greedy Trajectories & Augmentation)
推理时,POMO 不是只输出一个贪心轨迹,而是:
-
从 N 个起点生成 N 条贪心轨迹;
-
选取最优结果。
此外,引入Instance Augmentation(实例增强):
-
对问题实例施加对称变换(如坐标翻转、旋转);
-
在每个增强实例上独立推理;
-
取最优结果。
这一思想类似于图像识别中的“多视角评估”,可在不增加训练开销的情况下显著提升结果质量。
🧠 三、实验与结果分析
论文验证了 POMO 在三个经典组合优化问题上的表现:
1️⃣ Traveling Salesman Problem (TSP)
-
对比对象:Concorde、LKH3、Gurobi、Attention Model 等;
-
POMO 在 TSP100 上的最优性差距仅 0.14%,推理速度快一个数量级。
-
同一 Attention Model 网络,换用 POMO 训练后,TSP100 最优性差距从 3.51% 降到 1.07%。
2️⃣ Capacitated Vehicle Routing Problem (CVRP)
-
POMO 仍显著优于基线,CVRP100 的 gap 仅 0.32%;
-
即使不引入额外的“起点选择”模块(SelectStartNodes),也能有效利用对称性。
3️⃣ 0–1 Knapsack Problem (KP)
-
表明 POMO 并不限于路径类问题;
-
同样的网络结构,仅替换输入含义(weight, value),仍获得接近最优解。
🔍 四、优点与贡献总结
POMO 的贡献主要体现在三方面:
| 创新点 | 具体内容 | 效果 |
|---|---|---|
| 1. 多起点并行优化 | 充分利用组合优化问题的多重对称最优性 | 增强探索性与鲁棒性 |
| 2. 共享低方差基线 | 用全局平均回报代替单轨迹基线 | 训练稳定且收敛更快 |
| 3. 多贪心推理 + 实例增强 | 多视角决策、数据增强 | 精度显著提升,推理更快 |
🧮 五、总体结论
POMO 是一种通用的强化学习框架,能在不依赖人工启发式设计的情况下,自动学习高质量的组合优化求解策略。其优势包括:
-
纯数据驱动:无需手工规则;
-
快速稳定训练:低方差更新;
-
更优推理效果:借助对称性实现多最优学习;
-
广泛适用性:可扩展至 TSP、CVRP、KP 等多类问题。
🧭 六、POMO 的马尔可夫特性(Markov Property in POMO)
(1)基本概念回顾
在强化学习(RL)中,环境被形式化为一个马尔可夫决策过程(MDP),由五元组 (S,A,P,R,γ) 定义:
-
S:状态空间(state space)
-
A:动作空间(action space)
-
P(s′∣s,a):状态转移概率
-
R(s,a):即时奖励
-
γ:折扣因子
马尔可夫性质(Markov Property) 表示系统的未来状态只依赖于当前状态和当前动作,而与过去历史无关。
(2)在 POMO 中的体现
POMO 仍然遵循马尔可夫性质,只是对传统强化学习的轨迹采样方式进行了改造。
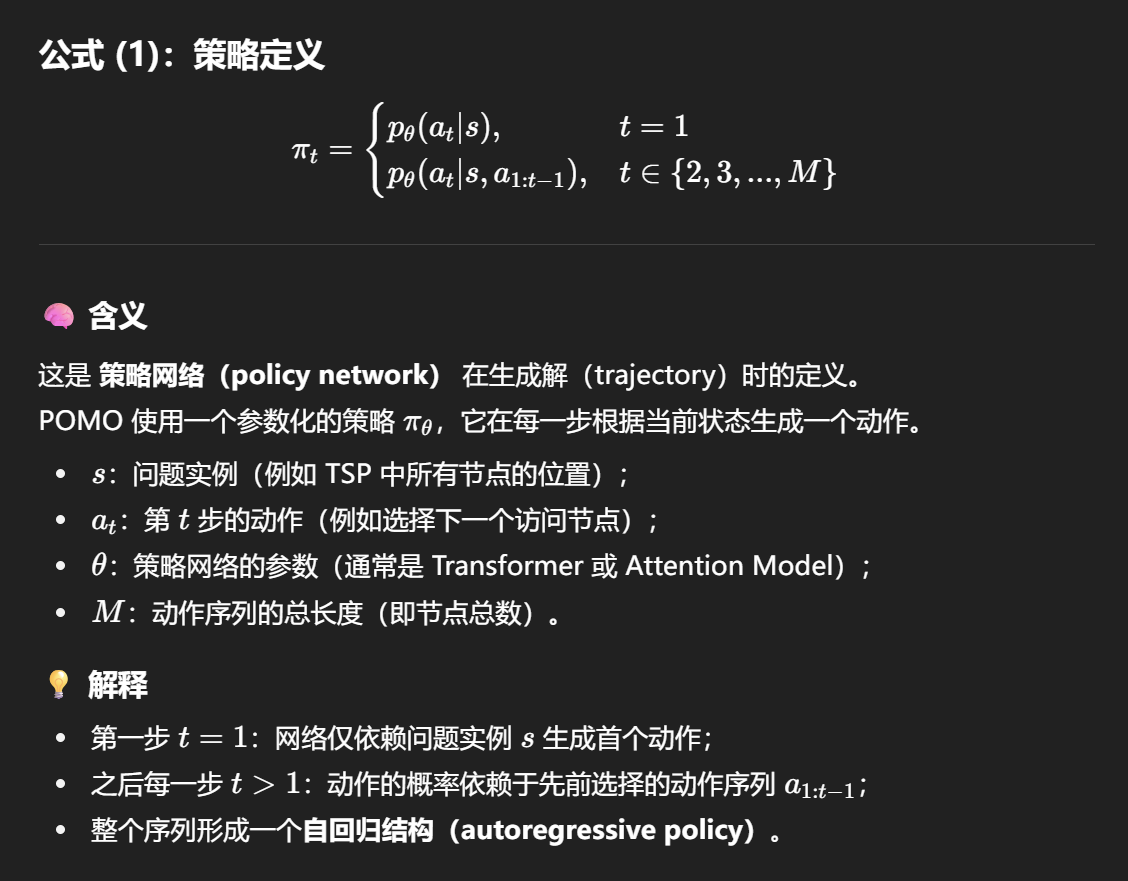
在传统的 REINFORCE 框架下,生成轨迹的方式为:

其中策略 πθ根据当前状态 st(以及历史动作)决定下一个动作。
而在 POMO 中:
-
同一个问题实例 sss 下,会从多个起始状态(或节点)同时展开多条轨迹;
-
每条轨迹
 独立遵循马尔可夫性质;
独立遵循马尔可夫性质; -
各条轨迹之间互不干扰,只在训练时共享基线(baseline)。
因此,POMO 实际上是在同一个 MDP 环境下进行多次并行采样,每条轨迹都是一个独立的马尔可夫链,只是初始状态不同。
(3)数学视角:多起点马尔可夫过程
POMO 将原始的单起点马尔可夫决策过程扩展为:

其中每个 MDPi拥有相同的状态转移概率 P、奖励函数 R,但起始状态不同。
这种设计带来的好处:
-
多样化探索,避免策略陷入某一局部最优;
-
利用多个对称起点的轨迹估计共享期望回报 E[R(τi)],减小方差;
-
更稳定地逼近最优策略 π∗。
(4)POMO 中的状态与动作定义举例
以旅行商问题(TSP)为例:
-
状态(State):当前访问的节点序列、剩余未访问节点;
-
动作(Action):选择下一个访问的节点;
-
转移(Transition):将所选节点加入路径;
-
奖励(Reward):负的路径总长度(目标为最小化距离)。
每个起点形成一条独立的马尔可夫路径(trajectory),整个并行过程是多个 MDP 实例的集合。
🧩 七、POMO 的后处理机制(Post-processing in POMO)
(1)后处理的动机
虽然 POMO 在强化学习框架下已经能直接生成高质量的解,但组合优化问题的复杂性决定了:
-
模型输出的解往往是近似最优;
-
通过一些后处理步骤(post-processing),可进一步优化结果质量。
POMO 的后处理思想来源于传统启发式算法(如 LKH、2-opt),但它在实现上更轻量、更高效,特别是结合了“实例增强”和“多贪心推理”的思路。
(2)主要的后处理方法
POMO 的后处理主要包括以下三种类型:
① 多贪心推理(Multiple Greedy Rollouts)
-
传统 Attention Model(AM)或 REINFORCE 在推理时,只生成一条贪心路径;
-
POMO 从多个起点(N 个起点)生成 N 条贪心路径;
-
然后从这些路径中选择最优的一个作为最终解。
这种方法本质上是一种多候选解后筛选机制(multi-rollout selection),它能有效避免因起点偏置导致的局部最优。
✅ 效果:在推理阶段不增加训练成本的前提下,性能显著提升,TSP100 的最优性差距从 1.07% 降至 0.14%。
② 实例增强(Instance Augmentation)
-
POMO 借鉴计算机视觉的“测试时增强(Test-time augmentation, TTA)”概念;
-
对原始问题实例做对称变换(翻转、旋转、坐标交换等),生成多个等价问题;
-
对每个增强实例分别推理,然后选择最优解作为最终输出。
例如在 TSP 中:
-
将节点坐标进行镜像变换
(x, y) → (1-x, y); -
旋转
(x, y) → (y, x); -
或对输入顺序重新排序(input reordering);
-
这些变化不会改变问题的最优路径,但能引导网络探索不同的策略。
✅ 效果:相当于在后处理阶段进行“数据增强”,提高解的多样性与鲁棒性。
🧮八、 POMO 论文中的公式逐条解析
✅ 总结:POMO 中公式的整体逻辑关系
| 公式编号 | 含义 | 所属阶段 | 关键作用 |
|---|---|---|---|
| (1) | 策略生成 | 训练 & 推理 | 定义策略网络如何生成动作 |
| (2) | 多起点轨迹定义 | 训练 | 并行生成 N 条轨迹 |
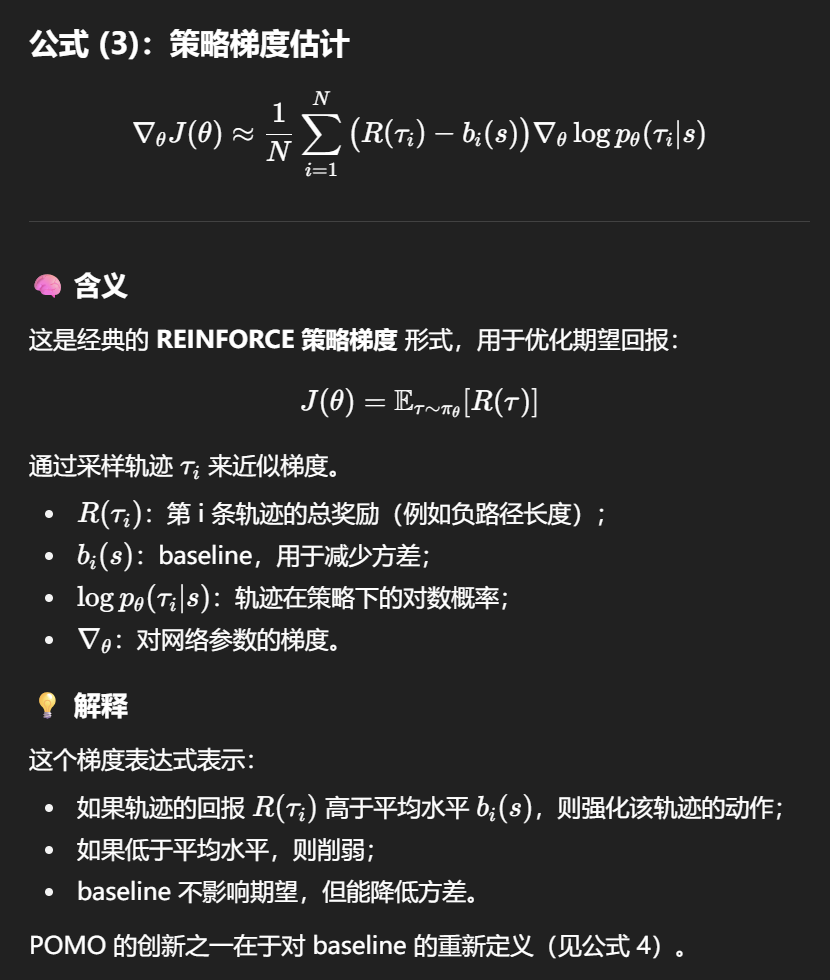
| (3) | 策略梯度 | 训练 | 计算参数更新方向 |
| (4) | 共享基线 | 训练 | 降低方差、稳定训练 |
| (5) | 多轨迹最优选择 | 推理 | 后处理选出最优解 |
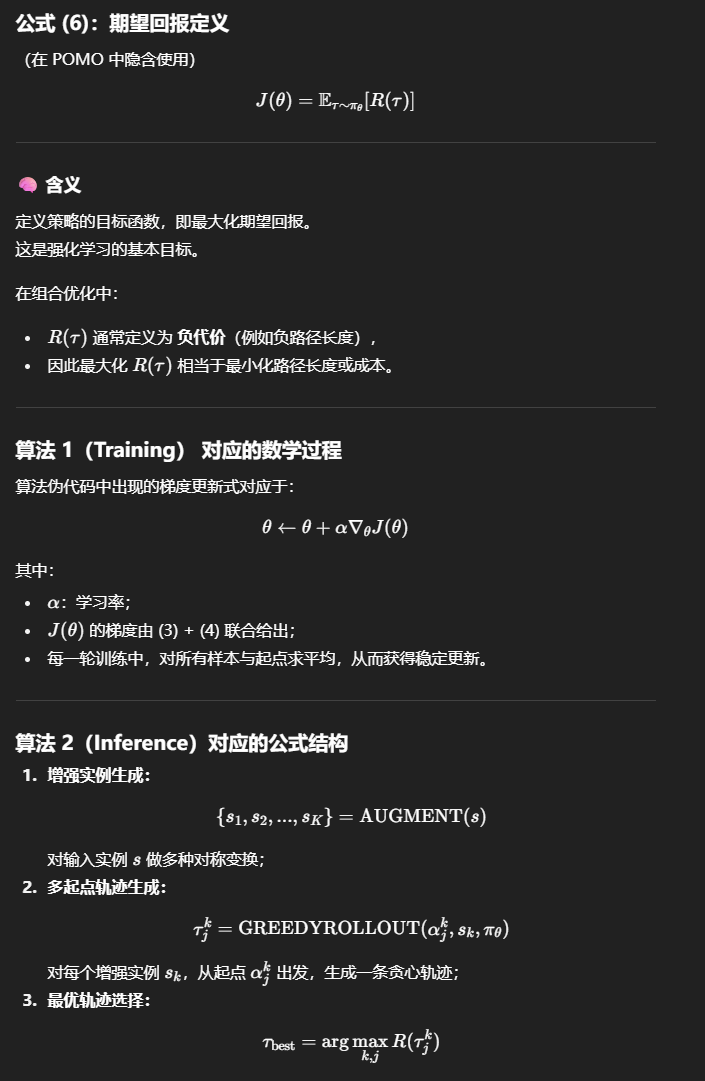
| (6) | 期望回报定义 | 理论目标 | 强化学习优化目标 |