全自动相机在线标定方法
ref: Camera Self-Calibration for Sequential Bayesian Structure From Motion
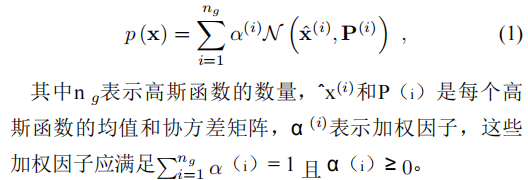
基于移动未校准相机的连续图像序列作为唯一输入源,通过序列贝叶斯框架进行相机全自动校准。由于校准参数估计引入的非线性特性,采用高斯和滤波器(SOG)将整体非线性变化范围分割为多个近似线性的小段,在估计初期阶段使用多个滤波器覆盖所有近似线性假设。由于多个高斯函数仅需在地图尺寸较小的初始阶段保留,预计其计算复杂度足够低,能够实现实时性能。

将每个EKF协方差P 通过测量方程传播并添加
零均值图像噪声R的协方差,得到创新协方差

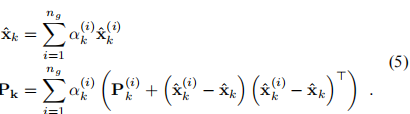
最后,整个滤波器的总体平均值和协方差计算如下:
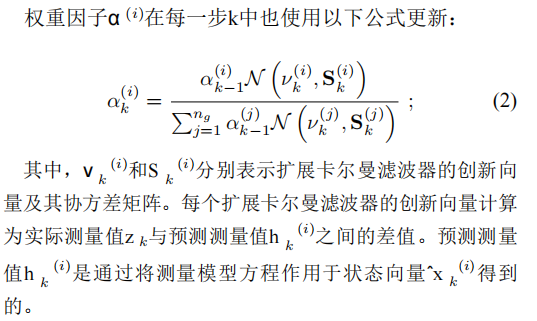
每当有新测量数据到达时,系统就会通过标准预测-更新扩展卡尔曼滤波方程对每个高斯函数进行更新。因此,SOG算法的核心部分是由多个并行运行的扩展卡尔曼滤波器组成的池。
直观理解SOG滤波器相较于EKF的两大核心优势:
x1. 需要指出的是,只要高斯函数数量足够大,任何概率密度函数都可以用加权高斯和进行合理近似。这意味着SOG滤波器无需像常规EKF那样假设概率密度函数为高斯分布。
2. 随着高斯函数数量的增加,每个函数对应的置信度P会逐渐减小,这种特性特别有利于保持线性化处理。