技术视界 | 破解“1+1>2”的难题:多机器人系统的协同挑战与前沿突破
在现代工业制造中,无论是汽车焊接、电子产品装配、飞机喷漆还是建筑构件安装,多机器人系统正逐渐成为提升生产效率的关键技术。通过在同一工作单元中部署多个机械臂,企业可以在不显著增加成本和空间的前提下,大幅缩短任务执行时间、提高整体产能。然而,尽管多机器人系统在理论上潜力巨大,其实际部署却面临一个根本性的挑战:如何在共享且充满障碍物的环境中,高效、安全地协调多个机器人完成多项任务?
本文将深入探讨多机器人系统面临的三大核心挑战:运动规划、任务调度与任务分配的"耦合地狱",解析谷歌DeepMind等机构最新推出的RoboBallet系统如何通过图神经网络实现突破性创新,并展望该技术在智能制造、仓储物流、医疗救援等领域的应用前景。
通过系统梳理多机器人协同技术的发展脉络与前沿突破,我们希望能为机器人领域的开发者、研究者和产业从业者提供技术洞察,共同推动机器人从"单兵作战"迈向"群体智能"的新纪元。

一、核心困境:规划、调度与分配的“耦合地狱”
多机器人协同需同时解决三个核心子问题,每个问题单独求解已属“计算硬骨头”,而三者的耦合关系更让传统方法难以突破。
1.运动规划(Motion Planning)之困
运动规划需为每个机器人规划“无碰撞路径”,确保末端执行器s精准抵达目标位置。传统基于采样的算法(如 RRT)在低维度场景中表现尚可,但当机器人数量超过4个、障碍物复杂度提升时,计算时间呈“指数级增长”。在实时要求极高的生产线上,这种延迟是无法接受的。
2.任务调度(Scheduling)之困
任务调度决定任务执行顺序,类似经典的“旅行商问题(TSP)”,属于PSPACE完全问题(计算复杂度随任务量呈指数上升)。即使采用近似解法,也需预设大量规则,难以适配产线换产、订单变更等动态场景。
3.任务分配(Assignment)之困
任务分配需决定哪个机器人执行哪个任务,但每个任务的“成本”并不是独立的,而是依赖于其他任务的分配和调度结果。一个看似最优的分配,可能会因为微小的调度调整或路径冲突而失效。
更棘手的是,三个子问题存在“牵一发而动全身” 的耦合关系:任务分配决定 “谁做什么”→ 直接影响调度阶段 “先做什么” 的顺序→ 调度顺序改变机器人的运动路径需求→ 路径耗时又反过来修正任务分配的合理性。
在传统方案中,业界通常将三大核心问题——“任务分配”、“调度排序”与“运动规划”——进行拆分迭代求解:即先由工程师人工分配任务,再规划调度顺序,最后才计算具体运动路径。这种方法不仅高度依赖人工经验,耗时可达数百甚至数千小时,而且常常为了追求计算可行性,不得不牺牲解决方案的整体质量与完整性。
进一步从系统架构层面来看,传统的多机器人路径规划与协作方法主要分为三类典型范式,它们各自面临不同的扩展性与性能瓶颈:
集中式规划:通过一个全局控制器计算所有机器人的轨迹,保证整体的最优性。但这种方法在机器人数量增加时难以扩展,并且计算开销极大;
分布式控制:每个机器人独立决策,并通过有限的信息交换实现协作。然而,该方法容易陷入局部最优,且在大规模场景下协调性不足。
启发式方法:依赖人工规则或搜索策略实现冲突避免与路径协调,在结构稳定、场景固定的环境中尚可应对,但面对复杂动态环境时,其规划质量与鲁棒性明显受限。
总体而言,传统方法无论从问题拆解思路还是系统架构设计上,都难以从根本上解决多机器人协同中规划、调度与分配三者之间的深度耦合问题,亟需新一代智能协同框架的出现。
二、前沿突破:RoboBallet如何破解“耦合地狱”
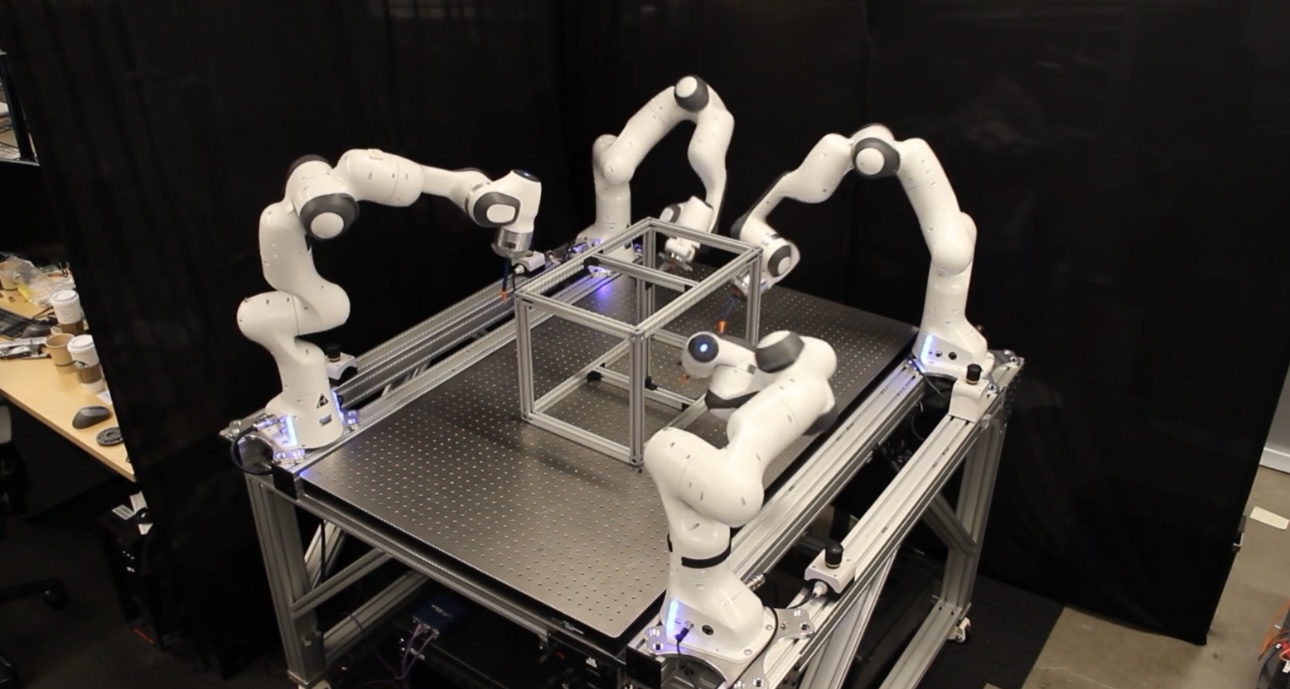
2025年9月,谷歌DeepMind、Intrinsic与伦敦大学学院联合推出的RoboBallet系统,正是针对上述“耦合地狱”的一次革命性突破。该系统通过统一的图神经网络架构,实现了规划、调度与分配三大难题的协同优化。
RoboBallet的核心创新在于,它不再将三个子问题拆开求解,而是构建了一个统一的图神经网络(GNN)框架。它基于GNN和强化学习(RL) 技术,将机器人、任务和障碍物转化为图中的节点,通过数百万次模拟场景训练,使系统能够自动生成无碰撞的运动规划。
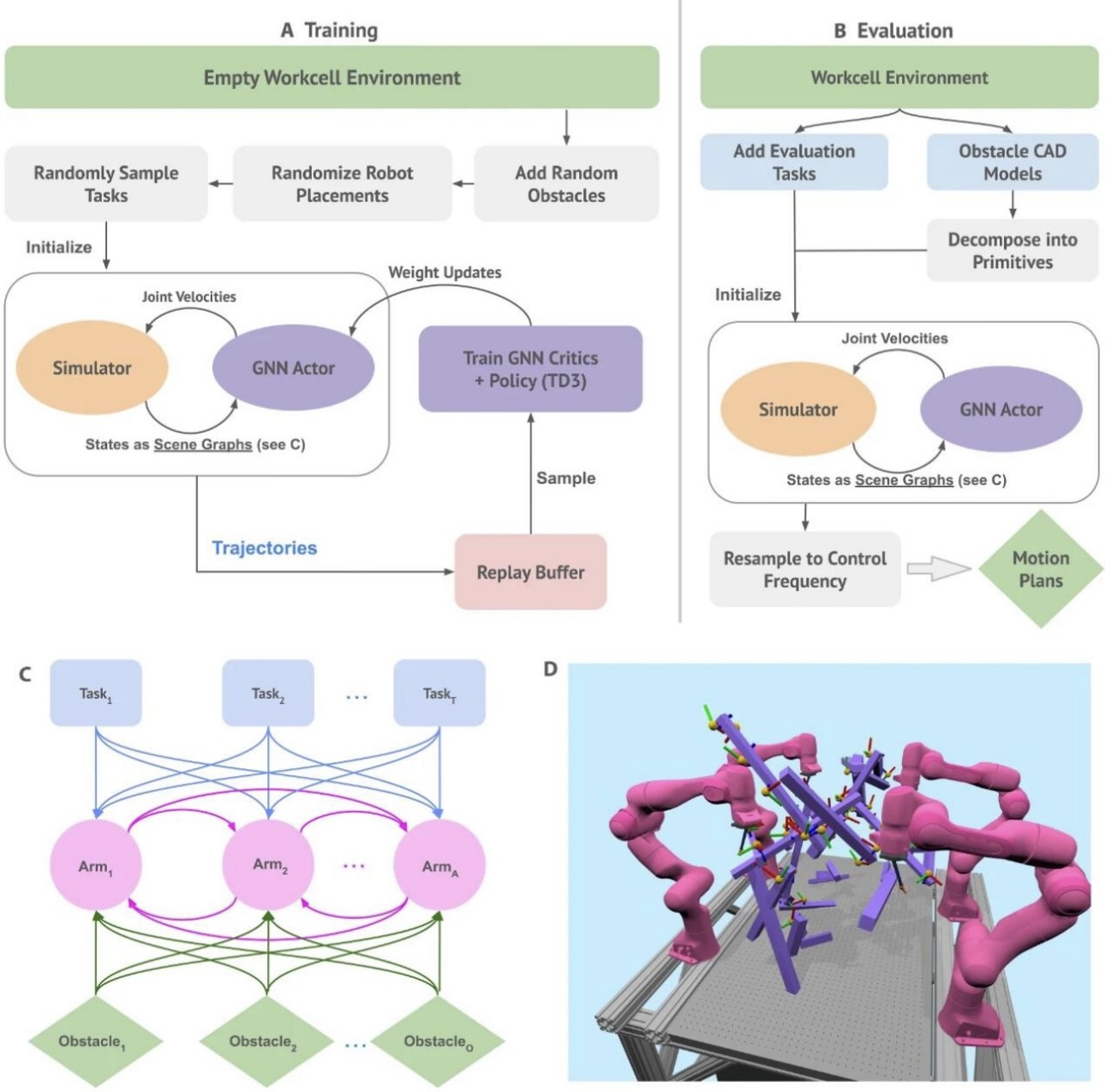
这种架构的优势在于,机器人能够理解周围环境(将每个障碍物视为网络中的一个点),从而找出最高效的协作方式。系统经过几天训练后,即使在从未见过的复杂布局中,也能在几秒钟内生成高质量计划,解决了多达8个机械臂的40项任务,远超以往系统的能力。
实验结果显示,RoboBallet与传统方法相比,在轨迹质量方面提高了约25%。当机器人数量从4台增加到8台时,任务执行时间平均缩短60%——这意味着系统复杂度不再成为性能瓶颈,真正实现了 “1+1>2” 的协同效应。
三、未来图景:协同技术的应用场景
当多机器人协同技术突破算力瓶颈与耦合困境,其应用场景正从传统制造车间,走向更广阔的产业前沿。这项技术将不再是简单的效率工具,而是重塑生产模式的核心引擎。
目前,这一技术正从实验室走向现实,其应用探索正沿着 “内部物流—专业服务—极端作业” 的路径逐步渗透,为我们勾勒出未来的演进路径:
智能工业仓储:在自动化仓库中,数十台移动机器人需要协调搬运货物。RoboBallet可以显著提升吞吐量和安全性;
智慧医疗与服务:医院中服务机器人协作完成物资运送,或家庭场景中多机械臂协作操作;
灾害救援:多台机器人协同完成搜索与救援工作,缩小搜救成本同时提升效率。
在多机器人协同技术迈向新阶段之际,OpenLoong开源社区正通过开放仿真平台、共享核心算法与数据集,为开发者提供探索"1+1>2"协同密码的基础设施。我们期待与全球开发者携手,共同推动群体智能技术的突破与落地,让更多创新在开源生态中涌现。
欢迎加入OpenLoong社区,一起构建机器人协同技术的未来!