【完整源码+数据集+部署教程】种子检测系统源码和数据集:改进yolo11-swintransformer
背景意义
研究背景与意义
随着全球人口的不断增长,农业生产面临着日益严峻的挑战。种子作为农业生产的基础,其质量和种类直接影响到作物的产量和品质。因此,开发高效的种子检测系统对于提高农业生产效率、保障粮食安全具有重要意义。近年来,计算机视觉技术的迅猛发展为种子检测提供了新的解决方案。基于深度学习的目标检测算法,尤其是YOLO(You Only Look Once)系列,因其高效性和准确性,逐渐成为种子检测领域的研究热点。
本研究旨在基于改进的YOLOv11算法,构建一个高效的种子检测系统。通过对特定种子图像数据集的分析与处理,我们希望能够实现对种子的自动识别与分类。该数据集包含100张经过精确标注的种子图像,类别数量为1,主要集中在特定类型的种子上。这一单一类别的设计,使得模型在训练过程中能够更专注于特定特征的学习,从而提高检测的准确性和鲁棒性。
此外,数据集在预处理阶段进行了自动方向调整和尺寸缩放,确保了输入数据的一致性和适应性。尽管未采用图像增强技术,但通过YOLOv11的改进算法,我们依然能够在现有数据基础上实现良好的检测效果。通过对种子图像的深入分析与学习,该系统不仅能够提高种子检测的效率,还能够为农业生产提供科学依据,推动智能农业的发展。
综上所述,基于改进YOLOv11的种子检测系统不仅具有重要的理论研究价值,还有助于实际应用中的种子质量监测与管理,为农业现代化提供技术支持。
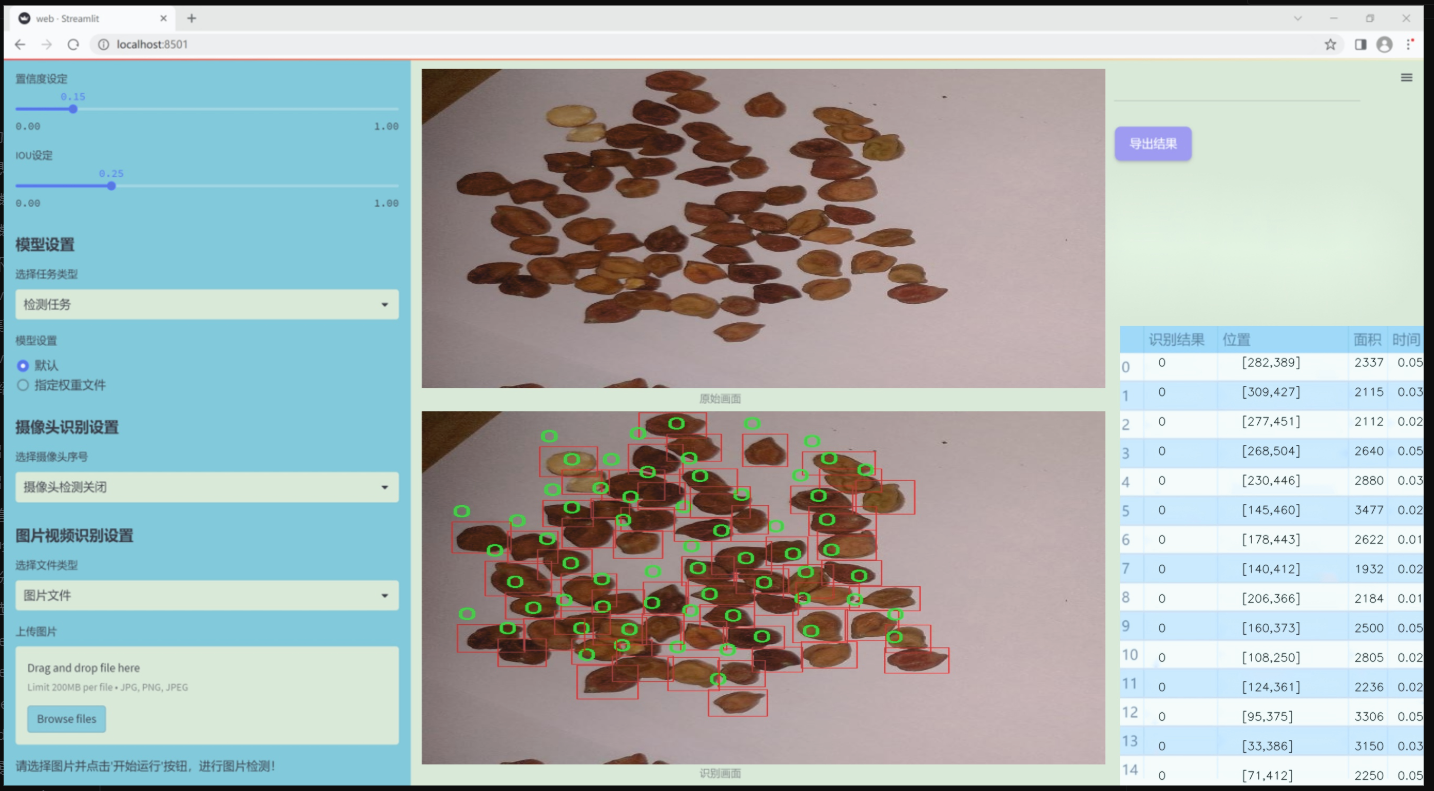
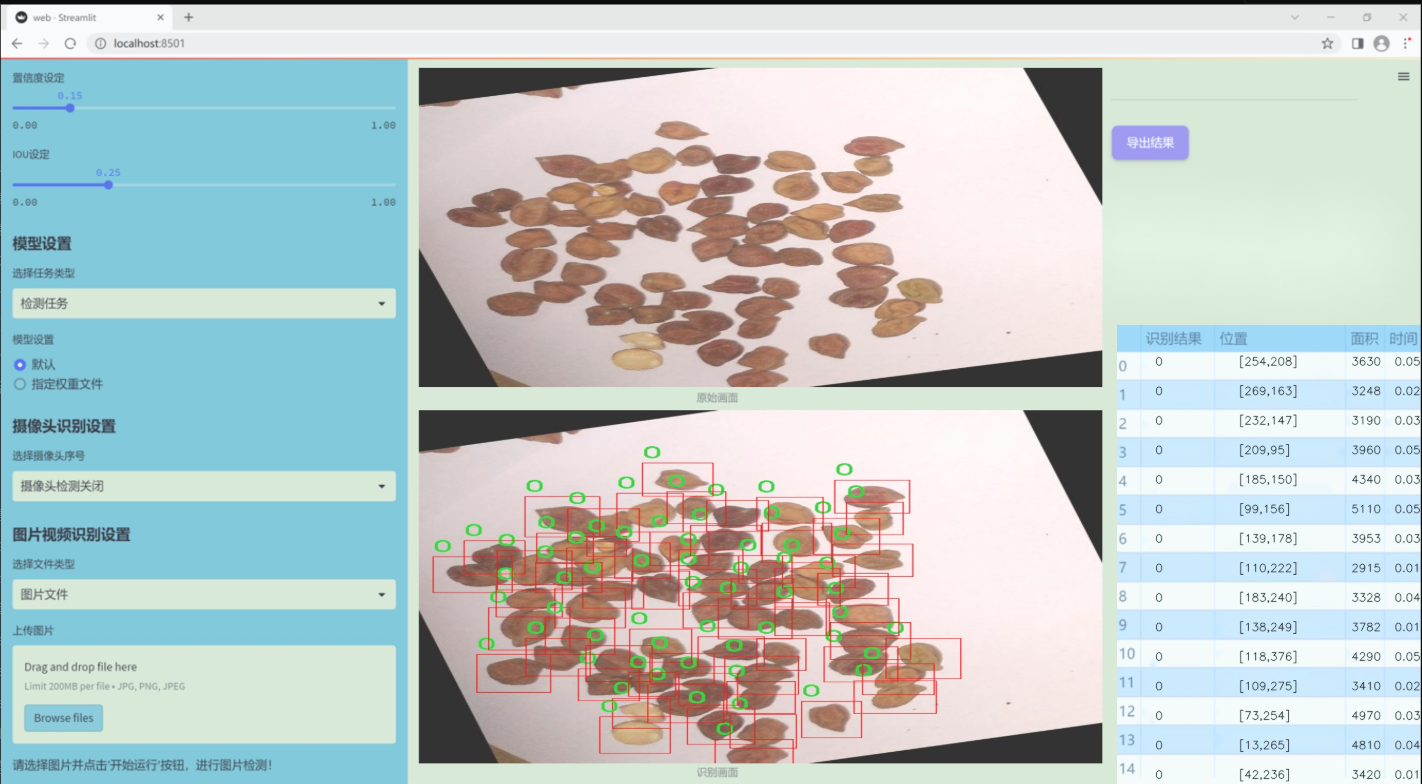
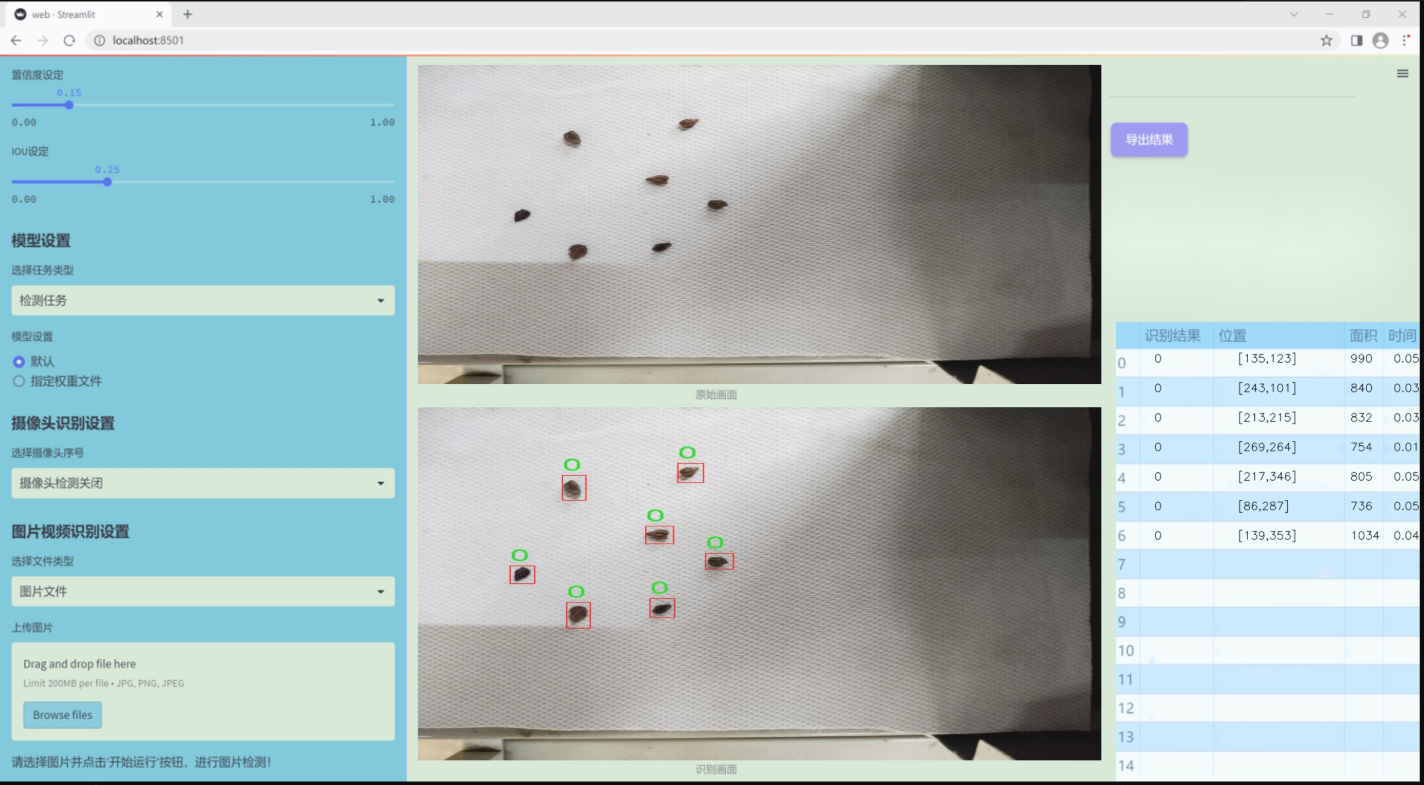
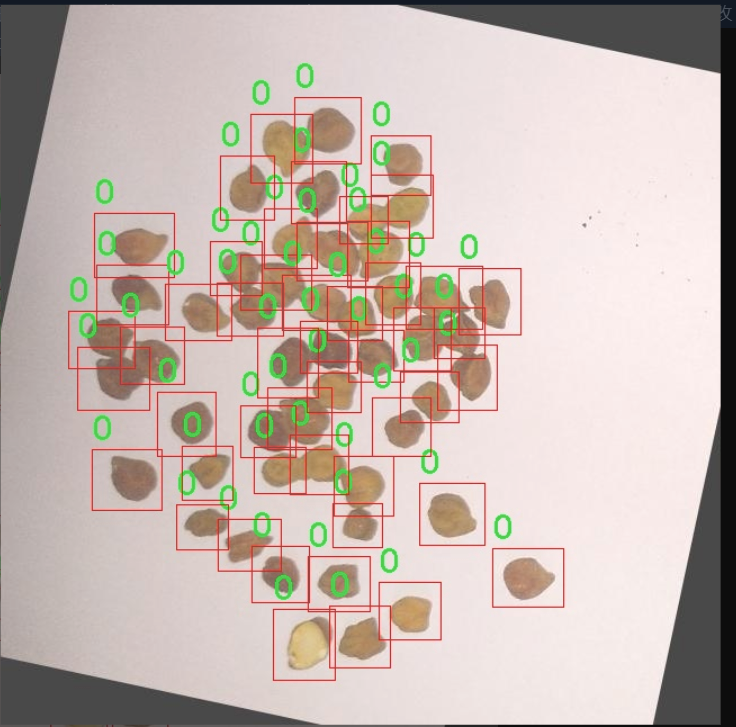
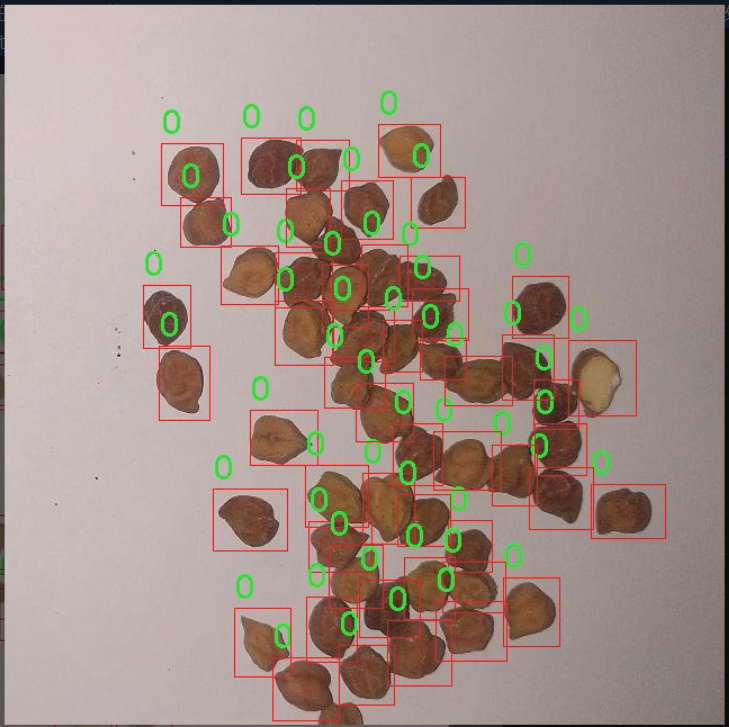
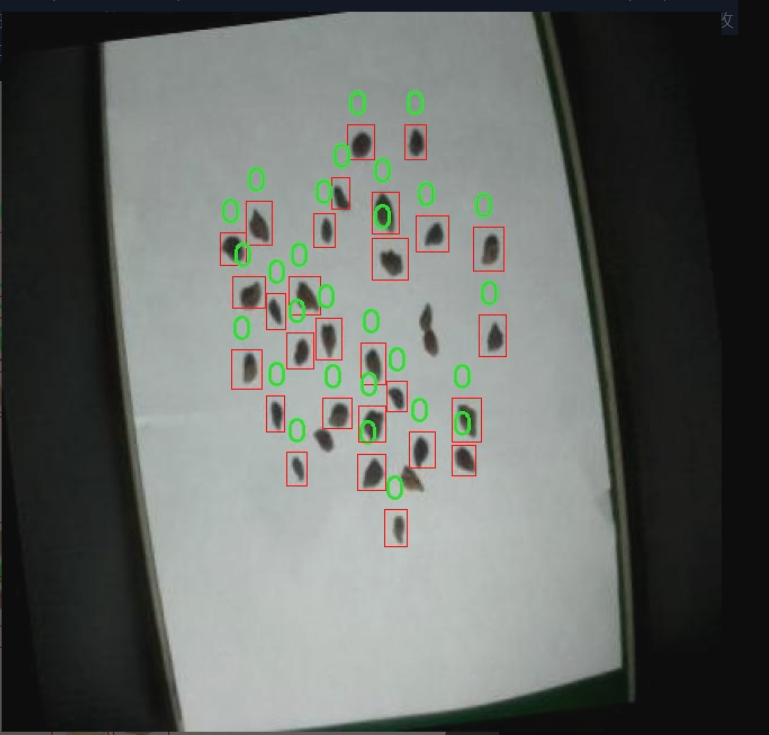
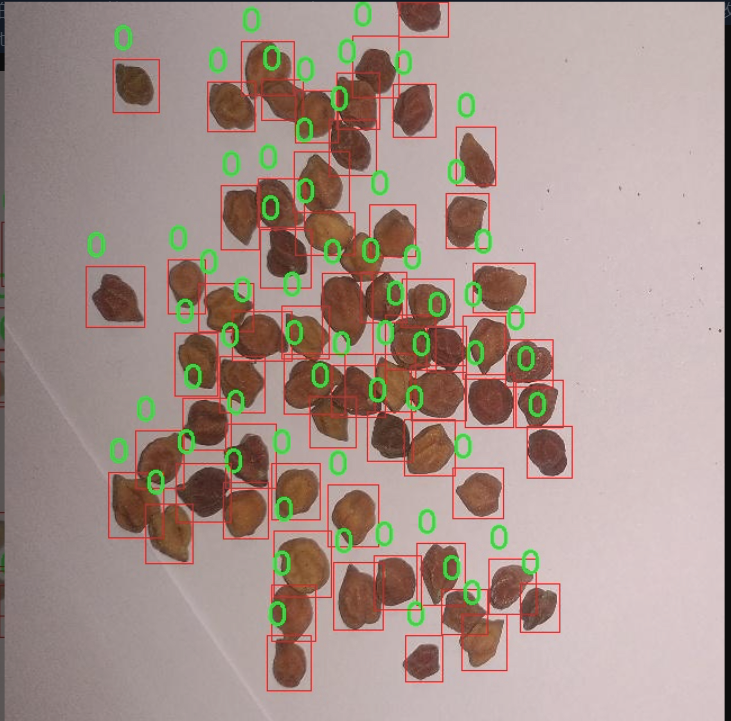
图片效果
数据集信息
本项目数据集信息介绍
本项目所使用的数据集旨在支持改进YOLOv11的种子检测系统,具体聚焦于“semillas_seleccionadas”这一主题。该数据集的设计初衷是为了解决种子识别和分类中的关键问题,尤其是在农业和植物科学领域中,准确的种子检测对于作物管理和育种工作至关重要。数据集中包含的类别数量为1,类别列表仅包含一个标识符“0”,这表明该数据集专注于一种特定类型的种子。这种简化的类别设置有助于系统在训练过程中更好地聚焦于目标对象,从而提高检测精度。
在数据集的构建过程中,采集了大量的种子图像,这些图像涵盖了不同的环境条件、光照变化以及种子在不同背景下的表现。这种多样性确保了模型在实际应用中能够适应各种复杂情况,提升其鲁棒性。此外,数据集中的图像经过精心标注,确保每一张图像中的种子位置和特征都得到了准确的描述。这种高质量的标注为YOLOv11模型的训练提供了坚实的基础,使其能够学习到种子的特征并在检测时做出准确的判断。
在训练过程中,数据集将被划分为训练集和验证集,以便于对模型的性能进行评估和调整。通过不断的迭代训练,期望最终能够实现一个高效、准确的种子检测系统,为农业生产提供技术支持。整体而言,本项目的数据集不仅为YOLOv11的改进提供了必要的数据基础,也为未来在种子检测领域的研究奠定了良好的基础。

核心代码
以下是经过简化和注释的核心代码部分:
import torch
import torch.nn as nn
from functools import partial
class Mlp(nn.Module):
“”“多层感知机(MLP)模块”“”
def init(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().init()
out_features = out_features or in_features # 输出特征数默认为输入特征数
hidden_features = hidden_features or in_features # 隐藏层特征数默认为输入特征数
self.fc1 = nn.Conv2d(in_features, hidden_features, 1) # 1x1卷积层
self.dwconv = DWConv(hidden_features) # 深度卷积层
self.act = act_layer() # 激活函数
self.fc2 = nn.Conv2d(hidden_features, out_features, 1) # 1x1卷积层
self.drop = nn.Dropout(drop) # Dropout层
def forward(self, x):"""前向传播"""x = self.fc1(x)x = self.dwconv(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return x
class Attention(nn.Module):
“”“注意力模块”“”
def init(self, d_model):
super().init()
self.proj_1 = nn.Conv2d(d_model, d_model, 1) # 1x1卷积
self.activation = nn.GELU() # 激活函数
self.spatial_gating_unit = LSKblock(d_model) # 空间门控单元
self.proj_2 = nn.Conv2d(d_model, d_model, 1) # 1x1卷积
def forward(self, x):"""前向传播"""shortcut = x.clone() # 保留输入作为shortcutx = self.proj_1(x)x = self.activation(x)x = self.spatial_gating_unit(x)x = self.proj_2(x)x = x + shortcut # 残差连接return x
class Block(nn.Module):
“”“基本模块,包含注意力和MLP”“”
def init(self, dim, mlp_ratio=4., drop=0., drop_path=0., act_layer=nn.GELU):
super().init()
self.norm1 = nn.BatchNorm2d(dim) # 批归一化
self.norm2 = nn.BatchNorm2d(dim) # 批归一化
self.attn = Attention(dim) # 注意力模块
self.mlp = Mlp(in_features=dim, hidden_features=int(dim * mlp_ratio), act_layer=act_layer, drop=drop) # MLP模块
def forward(self, x):"""前向传播"""x = x + self.attn(self.norm1(x)) # 注意力模块的残差连接x = x + self.mlp(self.norm2(x)) # MLP模块的残差连接return x
class LSKNet(nn.Module):
“”“LSKNet模型”“”
def init(self, img_size=224, in_chans=3, embed_dims=[64, 128, 256, 512], depths=[3, 4, 6, 3]):
super().init()
self.num_stages = len(depths) # 模块的数量
for i in range(self.num_stages):
# 初始化每个阶段的嵌入层和块
patch_embed = OverlapPatchEmbed(img_size=img_size // (2 ** i), in_chans=in_chans if i == 0 else embed_dims[i - 1], embed_dim=embed_dims[i])
block = nn.ModuleList([Block(dim=embed_dims[i]) for _ in range(depths[i])])
setattr(self, f"patch_embed{i + 1}“, patch_embed)
setattr(self, f"block{i + 1}”, block)
def forward(self, x):"""前向传播"""outs = []for i in range(self.num_stages):patch_embed = getattr(self, f"patch_embed{i + 1}")block = getattr(self, f"block{i + 1}")x, _, _ = patch_embed(x) # 嵌入层for blk in block:x = blk(x) # 通过每个块outs.append(x) # 收集输出return outs
class DWConv(nn.Module):
“”“深度卷积模块”“”
def init(self, dim=768):
super(DWConv, self).init()
self.dwconv = nn.Conv2d(dim, dim, 3, padding=1, groups=dim) # 深度卷积
def forward(self, x):"""前向传播"""return self.dwconv(x) # 进行深度卷积
def lsknet_t():
“”“创建LSKNet_t模型”“”
return LSKNet(embed_dims=[32, 64, 160, 256], depths=[3, 3, 5, 2])
if name == ‘main’:
model = lsknet_t() # 实例化模型
inputs = torch.randn((1, 3, 640, 640)) # 随机输入
outputs = model(inputs) # 前向传播
for output in outputs:
print(output.size()) # 打印输出尺寸
代码说明:
Mlp类:实现了一个多层感知机,包含两个1x1卷积层和一个深度卷积层,使用GELU激活函数和Dropout。
Attention类:实现了一个注意力机制,包含两个1x1卷积和一个空间门控单元(LSKblock)。
Block类:组合了注意力模块和MLP模块,并使用批归一化和残差连接。
LSKNet类:构建了整个网络结构,包含多个阶段的嵌入层和块。
DWConv类:实现了深度卷积操作。
lsknet_t函数:用于创建LSKNet_t模型的实例。
通过这些核心模块的组合,构成了一个深度学习模型,用于图像处理任务。
这个程序文件定义了一个名为 lsknet.py 的深度学习模型,主要用于图像处理任务。代码使用了 PyTorch 框架,并包含多个类和函数,构成了一个复杂的神经网络结构。以下是对代码的详细说明。
首先,程序导入了必要的库,包括 PyTorch 的核心模块、神经网络模块、以及一些工具函数。all 变量定义了可导出的模型名称。
接下来,定义了一个 Mlp 类,它是一个多层感知机模块,包含两个卷积层和一个深度可分离卷积(DWConv),以及激活函数和 dropout 层。这个模块的作用是对输入进行特征变换。
LSKblock 类是一个核心模块,包含多个卷积层,用于提取特征并进行注意力机制的计算。它通过空间卷积和深度卷积对输入进行处理,并使用 Sigmoid 函数生成注意力权重,最后对输入进行加权。
Attention 类实现了一个注意力机制,它使用 LSKblock 作为空间门控单元,结合前向传播中的残差连接来增强特征表示。
Block 类则是一个更高层次的模块,结合了注意力机制和多层感知机,使用 Batch Normalization 进行归一化处理,并支持 dropout 和路径丢弃(DropPath)以增强模型的鲁棒性。
OverlapPatchEmbed 类负责将输入图像转换为补丁嵌入,使用卷积操作来实现。这一过程将图像划分为多个小块,并为每个小块生成嵌入向量。
LSKNet 类是整个网络的主体,包含多个阶段,每个阶段由补丁嵌入、多个 Block 和归一化层组成。它支持多种参数配置,如图像大小、嵌入维度、深度等,并在前向传播中逐层处理输入。
DWConv 类实现了深度可分离卷积,主要用于特征提取。
update_weight 函数用于更新模型的权重,将预训练模型的权重加载到当前模型中,确保权重的形状匹配。
lsknet_t 和 lsknet_s 函数分别定义了两种不同配置的 LSKNet 模型,并支持加载预训练权重。
最后,在 main 块中,创建了一个 lsknet_t 模型实例,并使用随机生成的输入进行测试,打印每个输出的尺寸。
总体来说,这个程序实现了一个复杂的深度学习模型,主要用于图像特征提取和处理,采用了多种现代深度学习技术,如注意力机制、深度可分离卷积和残差连接等。
10.3 head.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
from …modules import Conv, DFL, make_anchors, dist2bbox
class Detect_DyHead(nn.Module):
“”“YOLOv8 检测头,使用动态头进行目标检测。”“”
def __init__(self, nc=80, hidc=256, block_num=2, ch=()):"""初始化检测头的参数。参数:nc (int): 类别数量,默认为80。hidc (int): 隐藏层通道数,默认为256。block_num (int): 动态头块的数量,默认为2。ch (tuple): 输入通道数的元组。"""super().__init__()self.nc = nc # 类别数量self.nl = len(ch) # 检测层的数量self.reg_max = 16 # DFL通道数self.no = nc + self.reg_max * 4 # 每个锚点的输出数量self.stride = torch.zeros(self.nl) # 构建时计算的步幅c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], self.nc) # 通道数# 定义卷积层self.conv = nn.ModuleList(nn.Sequential(Conv(x, hidc, 1)) for x in ch)self.dyhead = nn.Sequential(*[DyHeadBlock(hidc) for _ in range(block_num)]) # 动态头块self.cv2 = nn.ModuleList(nn.Sequential(Conv(hidc, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for _ in ch)self.cv3 = nn.ModuleList(nn.Sequential(nn.Sequential(DWConv(hidc, x, 3), Conv(x, c3, 1)),nn.Sequential(DWConv(c3, c3, 3), Conv(c3, c3, 1)),nn.Conv2d(c3, self.nc, 1),)for x in ch)self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity() # DFL层def forward(self, x):"""连接并返回预测的边界框和类别概率。"""for i in range(self.nl):x[i] = self.conv[i](x[i]) # 应用卷积层x = self.dyhead(x) # 应用动态头shape = x[0].shape # 获取形状 BCHWfor i in range(self.nl):x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1) # 连接卷积层的输出if self.training:return x # 如果是训练模式,返回中间结果elif self.dynamic or self.shape != shape:# 计算锚点和步幅self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))self.shape = shape# 将输出连接成一个张量x_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)box, cls = x_cat.split((self.reg_max * 4, self.nc), 1) # 分割边界框和类别dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.strides # 解码边界框y = torch.cat((dbox, cls.sigmoid()), 1) # 返回边界框和类别概率return y if self.export else (y, x) # 根据是否导出返回不同的结果def bias_init(self):"""初始化检测头的偏置,警告:需要步幅可用。"""m = self # 检测模块for a, b, s in zip(m.cv2, m.cv3, m.stride): # 从a[-1].bias.data[:] = 1.0 # 边界框偏置b[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # 类别偏置
其他检测头类可以根据需要进行类似的处理
代码说明
Detect_DyHead类:这是YOLOv8的检测头,使用动态头进行目标检测。它初始化了一些参数,包括类别数量、隐藏层通道数和动态头块的数量。
forward方法:这是前向传播的核心逻辑。它通过卷积层处理输入,并通过动态头生成特征。然后,它将特征连接并解码为边界框和类别概率。
bias_init方法:用于初始化模型的偏置参数,确保模型在训练时能够快速收敛。
以上是YOLOv8检测头的核心部分,其他检测头类可以按照类似的方式进行实现。
这个程序文件 head.py 是一个用于目标检测的深度学习模型的实现,主要是 YOLOv8 的检测头部分。它使用了 PyTorch 框架,包含了多个类和方法,用于构建不同类型的检测头。以下是对文件内容的详细说明。
首先,文件导入了一些必要的库,包括数学库、深度学习库 PyTorch 及其子模块。接着,定义了一些模块和工具函数,主要用于卷积操作、动态头、特征金字塔网络(AFPN)等。
在这个文件中,定义了多个检测头类,包括 Detect_DyHead、Detect_AFPN_P345、Detect_Efficient 等。这些类的构造函数中,通常会初始化一些参数,比如类别数量、隐藏通道数、卷积层、特征图的数量等。每个类的 forward 方法实现了前向传播的逻辑,处理输入的特征图,生成预测的边界框和类别概率。
Detect_DyHead 类是一个动态检测头,使用了动态卷积块(DyHeadBlock),可以根据输入特征图的形状动态调整锚框和步幅。它的 forward 方法中,首先对输入特征图进行卷积处理,然后通过动态头生成预测的边界框和类别概率。
Detect_AFPN_P345 类则实现了一个基于特征金字塔网络的检测头,使用了 AFPN 模块来增强特征提取能力。它的 forward 方法与 Detect_DyHead 类似,但在特征融合上有所不同。
Detect_Efficient 类实现了一个高效的检测头,使用了分组卷积和其他优化技术,以减少计算量和提高推理速度。
每个检测头类都实现了 bias_init 方法,用于初始化偏置项,以便在训练时加速收敛。
此外,还有一些其他的检测头类,如 Detect_LSCD、Detect_LSDECD、Detect_TADDH 等,分别实现了轻量级共享卷积、轻量级共享细节增强卷积、任务动态对齐检测等不同的功能。
每个类的 forward 方法通常会处理输入特征图,生成预测的边界框和类别概率,并在训练和推理时有不同的处理逻辑。推理时,通常会将预测结果进行后处理,以得到最终的检测结果。
文件的最后部分定义了一些用于特定任务的检测头,如 Segment_LSCD、Pose_LSCD、OBB_LSCD 等,分别用于分割、关键点检测和旋转边界框检测。
总体而言,这个文件实现了 YOLOv8 的多个检测头,提供了灵活的接口和模块化的设计,使得用户可以根据需要选择不同的检测头进行目标检测任务。
10.4 rep_block.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
定义一个卷积层和批归一化层的组合
def conv_bn(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1):
# 创建卷积层
conv_layer = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups,
bias=False) # 不使用偏置,因为后面会加批归一化
# 创建批归一化层
bn_layer = nn.BatchNorm2d(num_features=out_channels, affine=True)
# 将卷积层和批归一化层组合成一个序列
return nn.Sequential(conv_layer, bn_layer)
定义一个DiverseBranchBlock类,表示多分支块
class DiverseBranchBlock(nn.Module):
def init(self, in_channels, out_channels, kernel_size, stride=1, padding=None, dilation=1, groups=1):
super(DiverseBranchBlock, self).init()
# 计算填充,如果未提供则自动计算if padding is None:padding = kernel_size // 2 # 确保填充为卷积核大小的一半assert padding == kernel_size // 2 # 确保填充是正确的# 原始卷积和批归一化组合self.dbb_origin = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,stride=stride, padding=padding, dilation=dilation, groups=groups)# 平均池化分支self.dbb_avg = nn.Sequential(nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=1, padding=0, groups=groups, bias=False),nn.BatchNorm2d(out_channels),nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=0))# 1x1卷积分支self.dbb_1x1_kxk = nn.Sequential(nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride, padding=0, groups=groups, bias=False),nn.BatchNorm2d(out_channels))def forward(self, inputs):# 前向传播,计算各个分支的输出out = self.dbb_origin(inputs) # 原始卷积输出out += self.dbb_avg(inputs) # 加上平均池化分支的输出out += self.dbb_1x1_kxk(inputs) # 加上1x1卷积分支的输出return out # 返回最终输出
使用示例
创建一个DiverseBranchBlock实例
block = DiverseBranchBlock(in_channels=64, out_channels=128, kernel_size=3)
输出一个随机输入的前向传播结果
output = block(torch.randn(1, 64, 32, 32)) # 输入为1个样本,64个通道,32x32的图像
代码解释:
conv_bn函数:这个函数创建一个组合了卷积层和批归一化层的序列,通常用于构建卷积神经网络中的基本模块。
DiverseBranchBlock类:这是一个自定义的神经网络模块,包含多个分支(原始卷积、平均池化和1x1卷积),用于增强特征提取能力。
__init__方法:初始化方法中,计算必要的填充,并创建各个分支的卷积和批归一化层。
forward方法:定义了前向传播的过程,计算各个分支的输出并相加,返回最终的输出。
以上代码展示了如何使用PyTorch构建一个复杂的卷积模块,并通过多个分支来提取特征。
这个程序文件 rep_block.py 定义了一些用于构建深度学习模型的模块,主要是与卷积操作和批归一化相关的自定义层。文件中包含了多个类和函数,以下是对这些内容的详细说明。
首先,文件导入了必要的库,包括 PyTorch 的核心库和一些功能模块。接着,定义了一些工具函数,这些函数主要用于处理卷积核和偏置的转换,尤其是在进行批归一化时的融合。这些函数的功能包括:
transI_fusebn:将卷积核与批归一化层的参数融合,返回融合后的卷积核和偏置。
transII_addbranch:将多个卷积核和偏置相加。
transIII_1x1_kxk:处理1x1卷积和kxk卷积的组合,支持分组卷积。
transIV_depthconcat:将多个卷积核和偏置在深度维度上进行拼接。
transV_avg:生成一个均值卷积核。
transVI_multiscale:对卷积核进行多尺度填充。
接下来,定义了一个 conv_bn 函数,用于创建一个包含卷积层和批归一化层的序列模块。
接下来的几个类分别实现了不同的卷积块:
IdentityBasedConv1x1:实现了一个基于身份映射的1x1卷积层,允许在卷积操作中保留输入特征的某些信息。
BNAndPadLayer:这个类结合了批归一化和填充操作。它在进行批归一化后,如果需要,还会对输出进行填充。
DiverseBranchBlock:这是一个复杂的卷积块,包含多个分支。它根据输入的通道数和其他参数创建不同的卷积层,包括1x1卷积、3x3卷积和平均池化层。这个类还实现了从训练模式切换到部署模式的功能,能够生成一个融合后的卷积层。
DiverseBranchBlockNOAct:类似于 DiverseBranchBlock,但不包含非线性激活函数,适用于需要更高灵活性的场景。
DeepDiverseBranchBlock:在 DiverseBranchBlock 的基础上进行了扩展,支持更深层次的网络结构,能够更好地处理复杂的特征提取任务。
WideDiverseBranchBlock:进一步扩展了 DiverseBranchBlock,引入了水平和垂直卷积操作,以增强模型的特征提取能力,尤其是在处理非对称特征时。
这些类和函数的设计旨在提供灵活性和高效性,使得用户能够根据具体任务需求构建和调整卷积网络结构。整体来看,这个文件实现了多种高级卷积操作,适用于现代深度学习模型的构建,尤其是在计算机视觉任务中。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻