【人工智能与机器人研究】一种库坝系统水下成像探查有缆机器人系统设计模式
导读:
库坝系统是由水库与坝体构成的综合水利设施,是兼具水资源调控、防洪减灾与水电能源供应功能的核心枢纽工程,其涵盖坝体、防洪堤防、水电站厂房、闸门等关键水工结构。这些结构长期受水流冲击、水质侵蚀等影响,易出现结构损毁、漏水等问题。为解决传统人工探查效率低、风险高等问题,本文提出一种库坝系统水下成像探查有缆机器人系统(简称:CRS-UII)设计模式及实现方案。该模式以有缆机器人为载体,集成光学成像与环境感知设备,通过硬件架构与协同化软件算法,实现对水下结构多类型异常的有效探查,为库坝系统水下多场景探查机器人的研发提供通用性的参考设计框架。
作者信息:
樊棠怀:南昌理工学院电子与信息学院,江西 南昌;江西水利电力大学信息工程学院,江西 南昌;樊飞燕:江西水利电力大学信息工程学院,江西 南昌;程晓玲, 罗中华:南昌理工学院电子与信息学院,江西 南昌;沈克永:南昌理工学院计算机信息工程学院,江西 南昌
原文链接:
https://doi.org/10.12677/airr.2025.145112
论文详情
系统总体架构设计
库坝系统水下成像探查有缆机器人系统(CRS-UII)采用“物理层–算法层–应用层”的三层架构(如图1所示)设计。
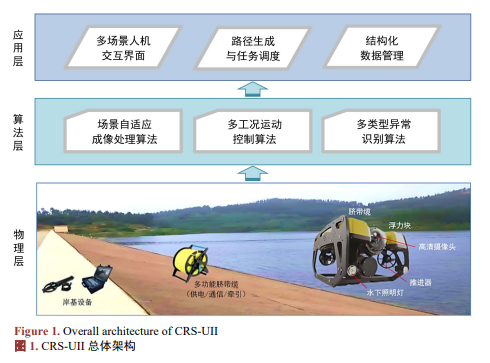
1. 物理层硬件模块设计
有缆机器人本体采用模块化设计,由成像模块、推进模块、感知模块、控制模块及脐带缆接口模块等组成,各模块通过标准化接口实现快速拆装与功能扩展。
连接机器人本体和岸基设备脐带缆绳具有供电、通信和机械牵引等多重功能。脐带缆采用复合结构,内部包含动力线、数据线和加强芯。
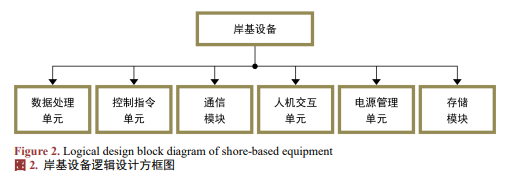
岸基设备是操作人员与水下机器人进行交互的平台,采用工业级集成设计,其逻辑设计方框图如图2示意。
2. 算法层设计
库坝水下环境因水体散射、吸收等作用,易导致图像出现模糊、色彩失真、对比度低等问题,需通过图像去噪、色彩校正、图像增强等多阶段处理实现质量优化,为后续缺陷识别提供可靠输入。
有缆机器人在水下运动时,受到水流扰动、脐带缆拉力等因素的影响,难以实现精准的运动控制。为提高机器人的运动精度,采用基于模型预测控制(MPC)框架构建含脐带缆拉力耦合的动力学模型,采用六自由度模型描述机器人运动,通过位姿与速度的映射关系体现运动特性,同时引入由拉力系数与实测拉力确定的脐带缆拉力干扰项,以反映缆绳对机器人运动的影响。
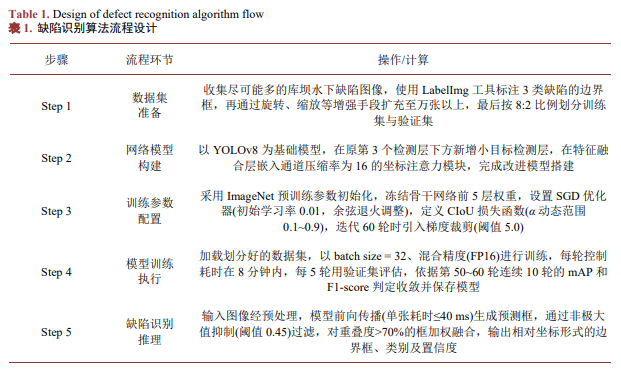
缺陷识别作为库坝水下成像探查的核心任务,计划采用基于深度学习的算法方案,以实现对裂缝、蚀坑等常见缺陷的自动识别和定位。缺陷识别算法流程设计参见表1。
3. 应用层功能设计
人机交互界面采用模块化设计,实现高效信息交互与操控。
任务规划模块采用动态优化策略,结合库坝结构与环境信息提升探查效率。
数据管理模块采用分布式存储架构,分类存储水下图像、设备状态、操作日志等数据,支持按时间、位置、缺陷类型多维度检索,响应时间≤1 s。
采用RAID 5冗余机制保障数据完整性,关键图像自动生成3份备份(本地服务器 + 云端 + 移动硬盘)。引入数据压缩算法,对原始图像压缩比1:5,节省存储空间同时保留细节。设置分级权限管理,操作人员仅可查看与操作相关数据,管理员拥有全量访问与删改权限。系统自动按日生成数据完整性校验报告,异常数据触发告警并记录修复日志,确保数据可追溯。
结束语
本文提出的库坝系统水下成像探查有缆机器人系统(CRS-UII)设计模式,作为库坝安全监测的关键前端设备,可满足水下结构高效精准的探查需求,其特点如下:
(1) 硬件层采用模块化集成设计,机器人本体融合生物侧抑制滤波增强的成像模块、六自由度矢量控制(推进效率优化至0.82)的推进模块及多维度感知模块,配合复合铠装脐带缆,实现高清成像、低耗灵活运动与稳定作业的协同。
(2) 算法层构建“成像优化–运动控制–缺陷识别”全链路处理体系,通过联合去噪增强算法提升图像质量,改进模型预测控制MPC与定位更新模型(Xk=Xk−1+vk⋅Δt⋅cos(θk)),保障轨迹与定位精度,改进YOLOv8模型实现微小缺陷高效识别,支撑探查精准性。
(3) 控制系统具备智能交互、任务规划与网络协同能力,通过算法协同实现路径优化与动态调整,支持多模式调度,可接入库坝安全监测平台构建全域网络,为运维决策提供精准数据支撑。
基金项目:
本文得到国家自然科学基金(62463021)、江西省自然科学基金(20242BAB25049)的资助。