双目测距实战2-相机标定过程
以标定板实物右下低角为世界坐标系原点,和拍出照片左上角为图片原点,可以得到两个坐标:世界坐标系和像素坐标系
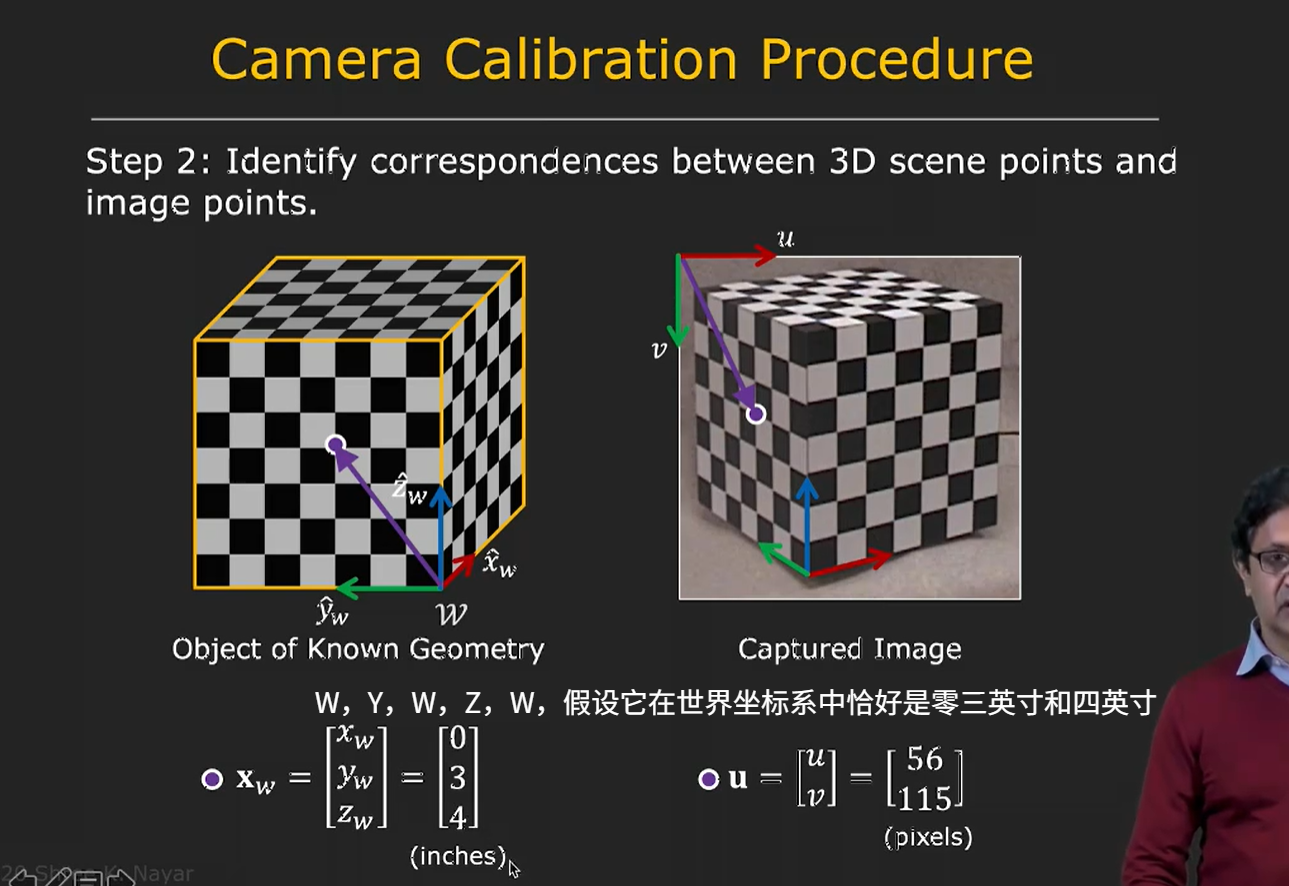
我们需要多组这样的点,可以手动点也可以通过图像处理技术获取(黑白角点识别),通过不同角度和位置拍摄多张标定板的图像,得到是一组3D和2D的对应点。根据每个黑白格的长度可以推算出世界坐标,根据拍出的图片识别角点可以识别出其像素坐标,如下图所示:
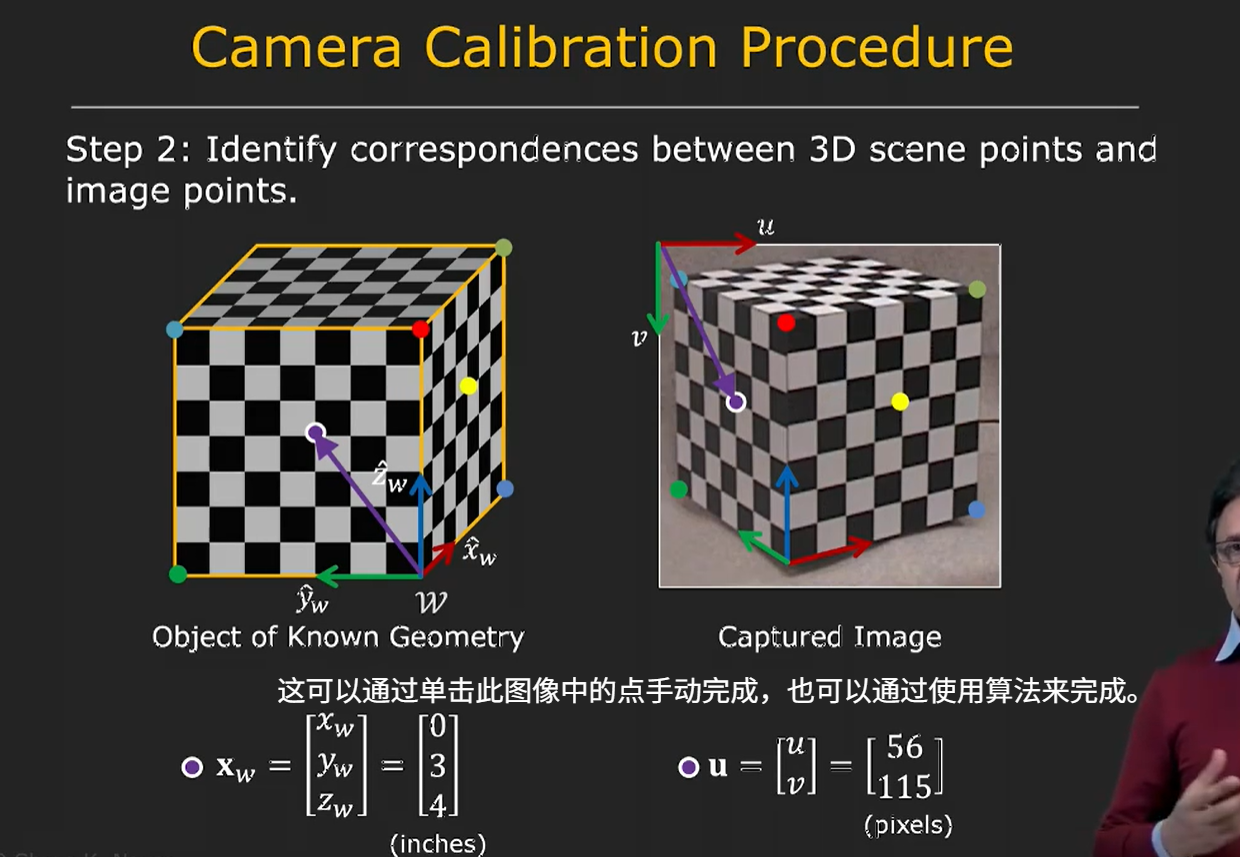
利用这些匹配对,通过特定的数学算法(张正友标定法)就可以解一个方程组,从而计算出相机的各项参数
内参:相机自身属性,一旦出厂基本固定,它描述了相机坐标系中的三维坐标点如何投影到图像的二维像素坐标系。主要包括:
- 焦距(fx fy)
- 主点坐标
- 畸变系数
外参:描述相机在世界坐标系中的位置和姿态,会随着相机移动而改变,一般以坐标系为世界坐标系,它定义了世界坐标系到相机坐标系的转换关系,主要包括:
- 旋转矩阵
- 平移向量
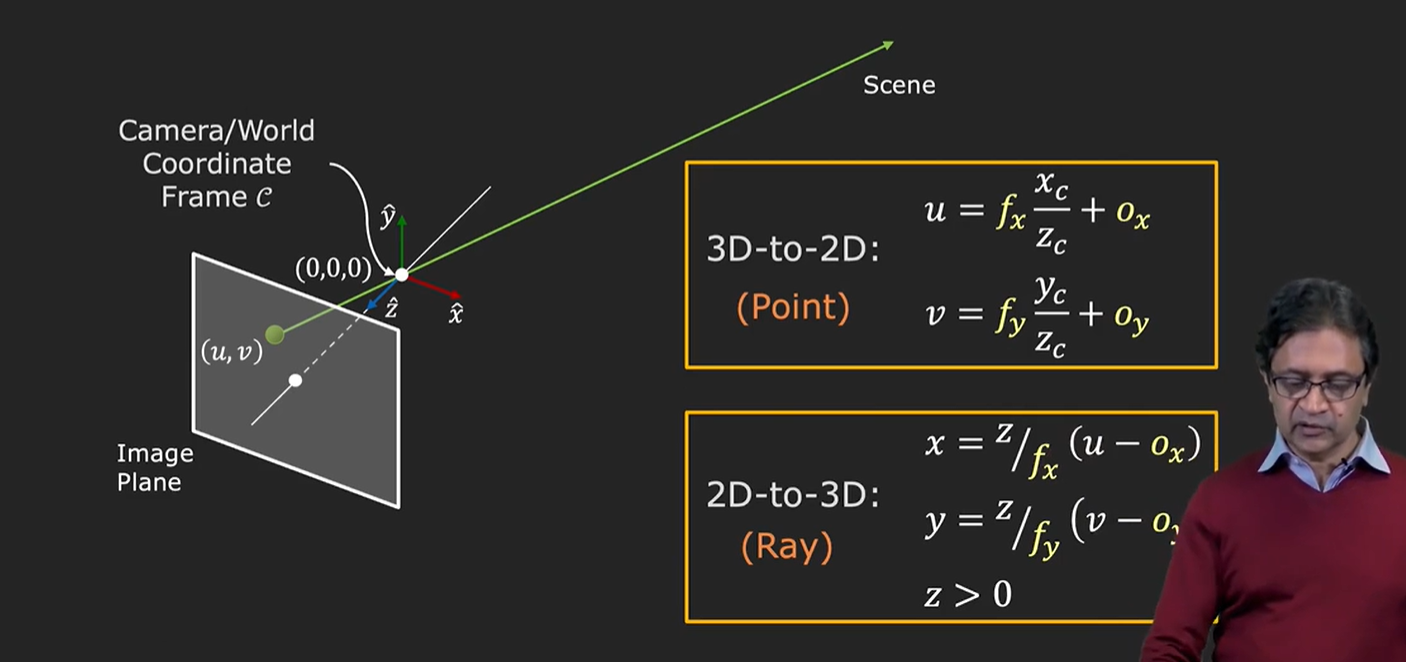
公式如下:
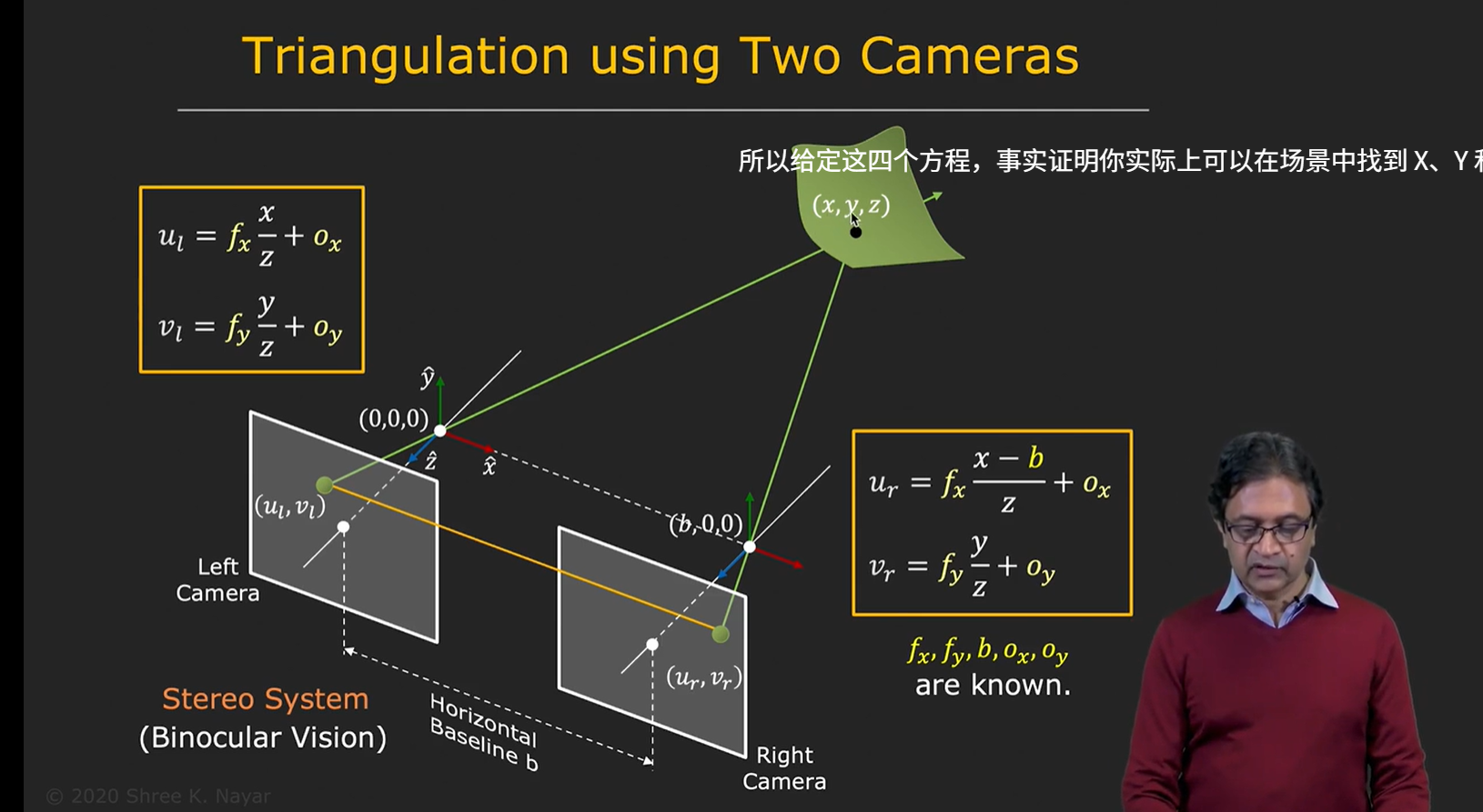
求解方程:
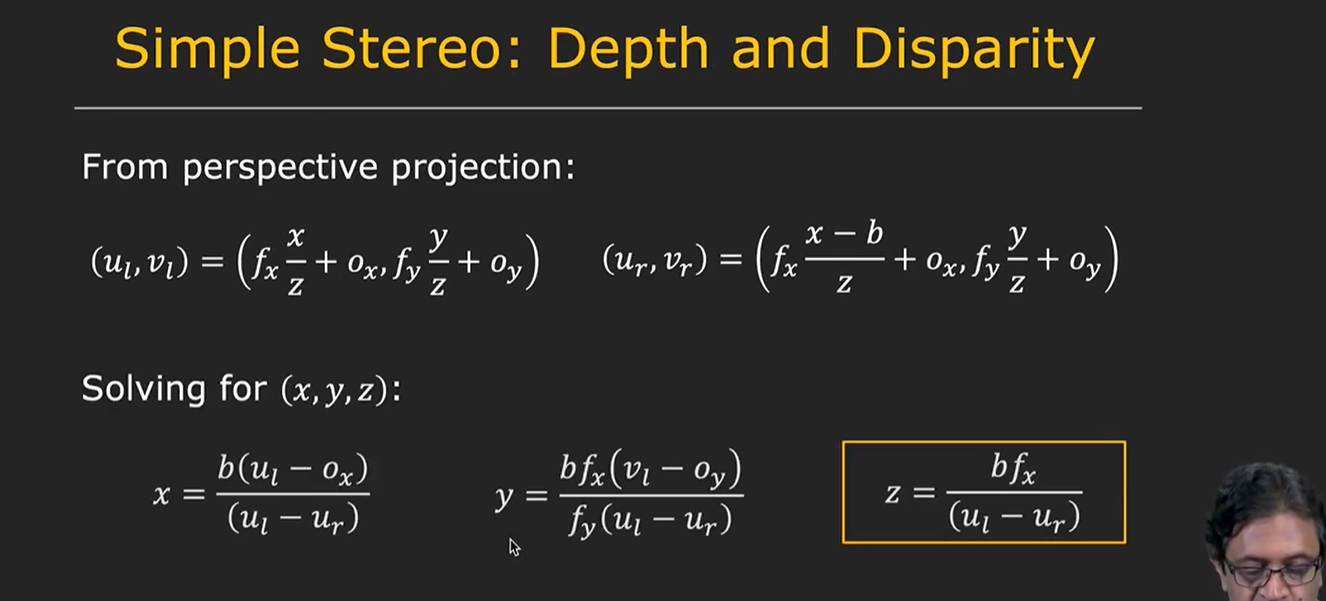
所以这里的重点是,在图像上找到对应的点!!!!然后结合内外参,就可以估计出这个点在相机坐标系下的位置。
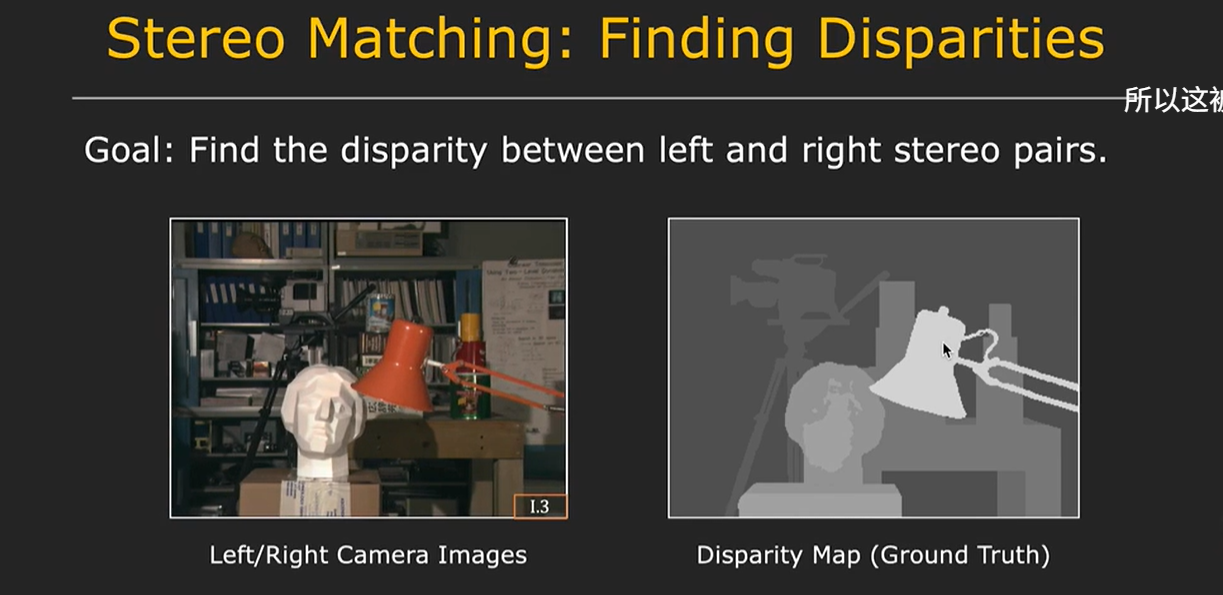
所以立体匹配很重要,通过立体匹配可以计算出视差图,视差图就是两两匹配坐标的X轴差异,有了视差图,就可以做3D坐标估计。