Autoware Universe 定位模块详解 | 第二节 深入研究定位模块数据流
在第一章中,我们宏观地理解了 Autoware Universe 定位模块的架构及其目标。本章将深入技术细节,详细阐述一个典型的多源融合(LiDAR + GNSS + IMU + 轮速计)配置下的数据流,揭示各个核心组件之间是如何通过 ROS2 消息话题进行交互的。
核心理念:分层处理与融合
Autoware Universe 的定位模块遵循一个清晰的分层设计哲学:原始传感器数据首先在各自的“估计器”中被处理成初步的位姿(Pose)或速度(Twist)估计,然后由一个中心的“融合滤波器”将这些估计值融合成一个统一、平滑且高频的车辆状态。
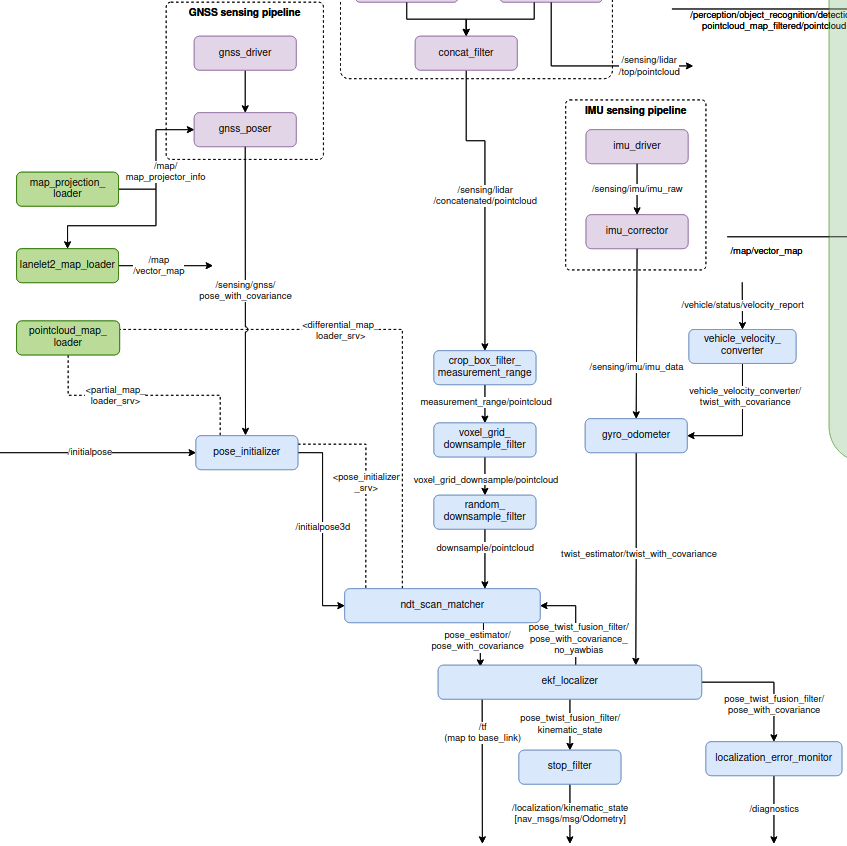
我们将结合上述的框图对 Autoware推荐的多源融合方案的数据流进行详细分解。
阶段一、传感器输入与预处理
这是数据流的起点。原始数据从硬件驱动发布,并经过初步处理以供下游使用。在本系列详细解析定位模块的文章中将以预处理后的数据作为输入,预处理过程将在传感器的系列中详细说明。
- LiDAR 数据
- 原始话题:
/sensing/lidar/front/pointcloud,/sensing/lidar/rear/pointcloud, 等 - 处理流程: 多个 LiDAR 的点云数据被聚合节点(如
pointcloud_concatenator)合并成一个统一的点云。 - 输出话题:
/sensing/lidar/concatenated/pointcloud - 定义:
sensor_msgs/msg/PointCloud2- 包含了合并后、在车辆基座标系 (base_link) 下的所有 LiDAR 点。
- 原始话题:
- IMU / 轮速计数据 (CAN 总线)
- 原始话题:
/vehicle/status/velocity_status(轮速),/sensing/imu/imu_data(IMU) - 处理流程: 转换节点(如
vehicle_velocity_converter)将来自 CAN 总线的车辆速度信息(通常是轮速和转向角)转换为符合ROS2标准消息类型的话题/vehicle_velocity_converter/twist_with_covariance,然后经gyro_odometer将其和 IMU 的角速度数据结合起来。 - 输出话题:
/sensing/vehicle_velocity_converter/twist_with_covariance - 定义:
geometry_msgs/msg/TwistWithCovarianceStamped- 包含了从车辆底层获取的线速度和角速度估计,以及其不确定性。
- 原始话题:
- GNSS 数据
- 原始话题: 依赖于具体的 GNSS 驱动。
- 处理流程: GNSS 驱动程序解析原始报文,并订阅map模块中的投影消息
/map/map_projector_info输出地图坐标系下标准的位姿消息。 - 输出话题:
/sensing/gnss/pose_with_covariance - 定义:
geometry_msgs/msg/PoseWithCovarianceStamped- 包含了由 GNSS 提供的绝对地理位置(已转换为地图坐标系)和姿态,及其协方差。
Based on my findings, here’s the corrected blog content following your format:
阶段二、启动与初始化
在车辆刚启动时,整个定位系统处于"未知"状态。它需要一个初始的"锚点"来告诉系统:“你大概在这里”。这个过程就是初始化,它是一个一次性的、独立于后续持续定位的步骤。
触发条件:
-
手动初始化: 最常见的方式是通过 RViz 可视化工具。操作员在加载了高精地图的 RViz 界面上,使用
2D Pose Estimate工具在地图上点击车辆的大致位置和朝向。这个动作会发布一个geometry_msgs/msg/PoseWithCovarianceStamped类型的消息到/initialpose话题,并触发定位初始化服务/api/localization/initialize。 -
自动初始化: 在默认配置中,系统可以利用 GNSS 的定位读数进行自动初始化。automatic_pose_initializer 节点会持续监控定位系统的状态,当检测到系统处于
UNINITIALIZED状态时,会自动调用初始化服务,并使用 GNSS 位姿作为初始输入。
初始化流程:
-
初始化服务被调用: 无论是手动还是自动触发,最终都会调用
/api/localization/initialize服务,由 pose_initializer 节点的 on_initialize() 方法处理。 -
停用下游模块: pose_initializer 首先通过 change_node_trigger(false) 方法,向 EKF 滤波器 (ekf_localizer) 和 NDT 估计器 (ndt_scan_matcher) 发送停用信号,暂时关闭它们的常规位姿处理流程Regular Measurement Callbacks (Controlled by is_activated_)。注意:用于初始化的回调函数Initial Pose Callback (ALWAYS Active)一直是活跃的,这也解释了为什么停用下游模块后,EKF仍然可以接收到初始位姿。
-
获取初始位姿:
- 如果是 AUTO 模式(自动初始化),系统会从
gnss_module获取 GNSS 位姿,并可选地通过 NDT 或 YabLoc 进行位姿精化(ndt_->align_pose())。 - 如果是 DIRECT 模式(手动初始化),直接使用用户提供的位姿。
- 如果是 AUTO 模式(自动初始化),系统会从
-
发布初始位姿: pose_initializer 将获得的初始位姿(附带协方差)发布到
pose_reset话题,该话题被重映射到/initialpose3d。 -
EKF 滤波器重置: ekf_localizer 订阅了
/initialpose3d话题。当接收到初始位姿消息后,其 callback_initial_pose() 方法会被触发,调用ekf_module_->initialize()将 EKF 的内部状态(位姿、速度、偏置等)完全重置到给定的初始值。 -
激活下游模块: pose_initializer 通过 change_node_trigger(true) 方法,向 EKF 和 NDT 发送激活信号:
- EKF: 设置
is_activated_ = true,开始正常的滤波处理流程。 - NDT: 设置
is_activated_ = true,开始监听点云数据并进行匹配。
- EKF: 设置
-
NDT 开始工作: NDT 被激活后,会从 EKF 的输出话题
ekf_pose_with_covariance读取当前位姿估计作为参考,结合传入的点云数据与高精地图进行匹配,输出精化后的位姿。 -
状态切换: 整个系统的状态从
UNINITIALIZED→INITIALIZING→INITIALIZED,并通过/api/localization/initialization_state话题发布状态更新。
关键实现细节:
- 服务驱动: 初始化流程由服务调用驱动,而非简单的话题发布。充分利用了服务一次性,而话题发布持续性的特点。
- NDT 位姿来源: NDT 不直接接收 pose_initializer 的初始位姿,而是通过
trigger_node_srv服务被激活后,从 EKF 的输出话题读取位姿作为匹配的初始参考。 - 激活控制: 使用显式的激活/停用机制(
trigger_node服务)来控制 EKF 和 NDT 的工作状态,确保初始化过程的原子性和可靠性。
这个阶段是整个定位系统从 0 到 1 的关键一步,它为后续的高精度、持续定位提供了必不可少的基础。通过服务化的设计和明确的状态管理,系统能够可靠地完成从未知状态到已定位状态的转换。在之后的功能包分析中,我们将从代码的微观角度重新审视初始化流程。
阶段三、闭环定位:估计、决策、融合与反馈
一旦初始化完成,系统就进入了一个高速、持续运行的闭环定位流程。这个流程中的各个环节紧密耦合,协同工作,以实现高精度、高鲁棒性的定位。
1. 并行估计与智能决策
在这个子阶段,多个定位算法并行运行,并将结果交由一个“大脑”来做决策。在上述框图中,我们只看到了基于激光雷达点云匹配进行位姿估计的默认配置,实际上Autoware提供多种位姿以及速度估计源,其设置方式将在下一章Autoware分层启动架构中提及。
在这一阶段,不同的传感器数据被送入各自最擅长的位姿估计算法中,并行地计算车辆的位姿和运动信息。在这里我们将只提到NDT和EagleEye两种模式,并不代表Autoware只存在这两种位姿源,我们也可以定义自己的位姿估计方式,具体如何配置在下一章中详细解释。
- 并行估计 (Parallel Estimation):
- NDT (基于 LiDAR): 利用 EKF 反馈的位姿作为初始猜测,将实时 LiDAR 点云与高精地图进行匹配,输出一个高精度的局部相对位姿。
- Eagleye (基于 GNSS+IMU): 融合 GNSS、IMU 和轮速计,独立地计算出一个平滑的全局绝对位姿。
- 其他估计器: Autoware 架构还允许接入更多种类的位姿估计器,如基于视觉的 Yabloc、基于反光贴的
marker_localizer等。
- 智能决策 (Arbiter / Pose Selector):
- 所有并行的估计器都将其结果发送给
pose_selector(裁决器)。 - 裁决器会根据每个估计器的健康状况(如 NDT 匹配得分)、不确定性(协方差大小)以及地图可用性等信息,实时地选择当前最可靠的一个位姿来源。
- 然后,它将这个最佳位姿转发到一个统一的话题
/localization/pose_estimator/pose_with_covariance上。这个“单一出口”的设计,极大地简化了下游融合模块的设计。
- 所有并行的估计器都将其结果发送给
2. 融合与反馈
这是闭环的最后一步,也是实现高精度和高频率输出的关键。
- 状态融合 (EKF Fusion):
ekf_localizer节点接收来自裁决器的统一位姿,以及来自车辆底盘的高频速度信息。- 通过卡尔曼滤波算法,它将这两者进行最优融合,生成一个最终的、平滑且高频(通常 > 50Hz) 的车辆运动状态,供规划和控制模块使用。
- 闭环反馈 (Feedback Loop):
ekf_localizer在融合过程中,会估计出传感器的实时偏置(如 IMU 的偏航角漂移)。- 它将一个包含了这个偏置的位姿,发布到专门的反馈话题
/localization/pose_twist_fusion_filter/biased_pose_with_covariance上。 - 上游的 NDT 节点会监听这个话题,并将其用作下一次点云匹配的初始猜测值。
这个 “EKF 预测 → NDT 修正 → Arbiter 决策 → EKF 更新 → 反馈给 NDT” 的紧密耦合循环,是 Autoware 定位系统的心跳。它确保了系统既能利用 NDT 在局部获得极高的精度,又能在 NDT 短暂失效时依靠其他传感器维持定位,同时通过反馈机制极大地提升了 NDT 的匹配效率和鲁棒性。
阶段四、后处理与监控
最后,一些辅助节点对 EKF 的输出进行处理和监控。
- 加速度估计:
twist2accel节点对/localization/kinematic_state中的速度进行微分,计算出加速度,发布到/localization/acceleration。 - 停止滤波器:
stop_filter在车辆静止时,强制将速度置为零,避免因传感器噪声导致车辆在静止时出现微小漂移。 - 错误监控:
localization_error_monitor监控位姿更新频率和协方差大小,在定位质量下降时发布诊断警告。
总结
通过上述数据流可以看出,Autoware 的定位模块是一个高度模块化、具备高容错性的系统。裁决器(Arbiter)使得系统能够灵活适应不同环境,而 EKF 则作为稳定核心,将不同频率、不同特性的传感器信息有机地融合成一个统一的车辆状态,为下游的决策和控制提供了坚实的数据基础。下一章我们将从分层启动文件入手,理解上述的流程在软件架构层面的实现。