库卡机械臂的转角系统以及固定轴和欧拉角的计算方式
库卡机械臂的转角为abc
当前坐标系为基坐标系时,abc为沿着基坐标系固定轴旋转的角度,分别对应为Rz Ry Rx
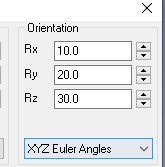
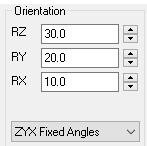
同一个旋转矩阵计算不同的转角系统的旋转角时,计算得到的欧拉角Rx Ry Rz 在数值上与固定轴的Rz Ry Rx对应的数值相同。如下图:
详细的矩阵转旋转角
欧拉角XYZ = 固定轴ZYX R=Rx⋅Ry⋅Rz
固定轴XYZ = 欧拉角ZYX R=Rz⋅Ry⋅Rx
库卡机械臂的转角为abc
当前坐标系为基坐标系时,abc为沿着基坐标系固定轴旋转的角度,分别对应为Rz Ry Rx
同一个旋转矩阵计算不同的转角系统的旋转角时,计算得到的欧拉角Rx Ry Rz 在数值上与固定轴的Rz Ry Rx对应的数值相同。如下图:
详细的矩阵转旋转角
欧拉角XYZ = 固定轴ZYX R=Rx⋅Ry⋅Rz
固定轴XYZ = 欧拉角ZYX R=Rz⋅Ry⋅Rx