H618-内核驱动的第一个hello world
一、PC端搭建编译环境
1、下载安装交叉编译器
cd /usr/local
mkdir arm
2、获取编译工具链
git clone https://github.com/LubanCat/gcc-arm-10.3-2021.07-x86_64-aarch64- none-linux-gnu.git
3、修改~/.bashrc 文件,永久保存环境变量 vim ~/.bashrc ,将下面的环境变量放在文件末尾,需要根据实际指定编译工具链的绝对路径

4、重新加载配置 source ~/.bashrc
5、查看编译工具链
aarch64-none-linux-gnu-gcc -v
二、PC端单独编译内核
1、将SDK中的内核源码单独拷贝出来
cp -r aw-image-build/source/kernel/linux-5.4-h618/ h618_kernel
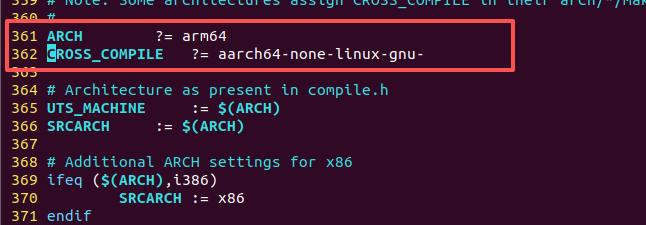
2、修改Makefile,使用交叉编译器
3、清除之前生成的所有配置和文件
make mrproper
4、加载 linux_h618_defconfig 配置文件 ,这步执行之后,会将 linux_h618_defconfig 配置加载到.config
make linux_h618_defconfig
5、编译内核
make -j4
6、编译时间较长,等待编译成功

三、编写hello world 驱动
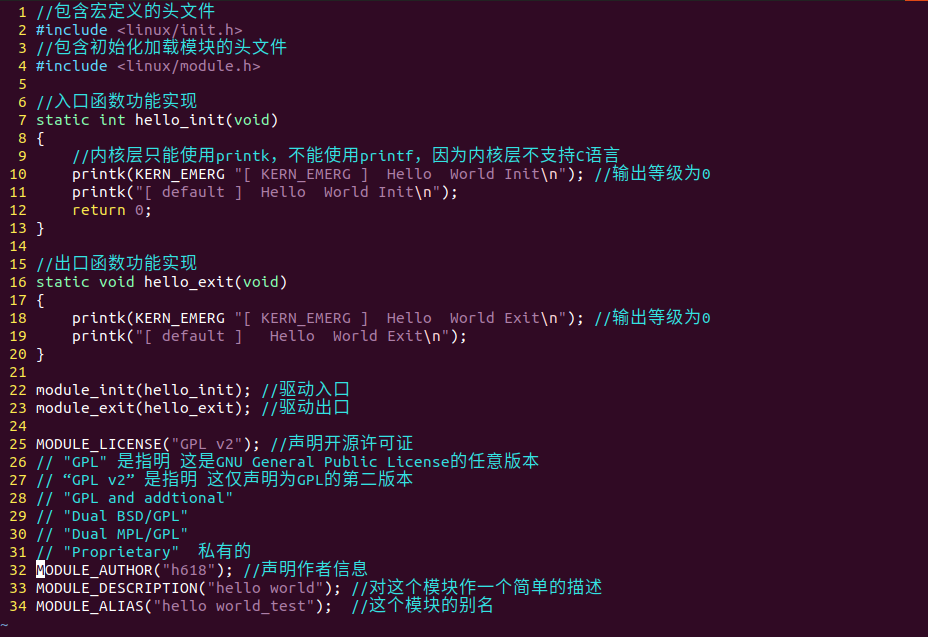
hello_world.c文件
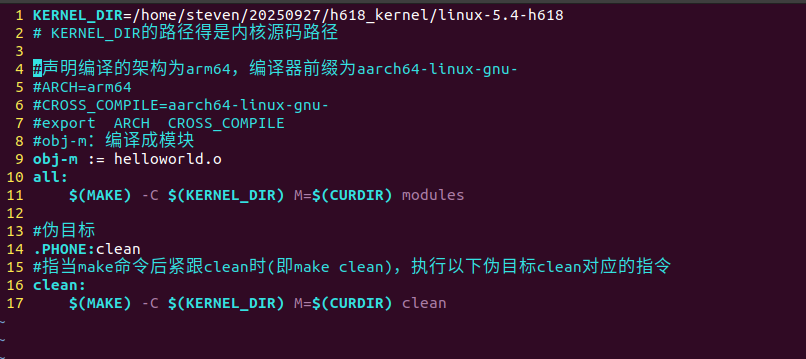
Makefile文件
四、编译运行
1、make编译

2、将编译生成的hello_world.ko模块发送给开发板
scp helloworld.ko kickpi@192.168.1.6:/home/kickpi/hello_world_driver
3、开发板端查看是否收到hello_world.ko模块
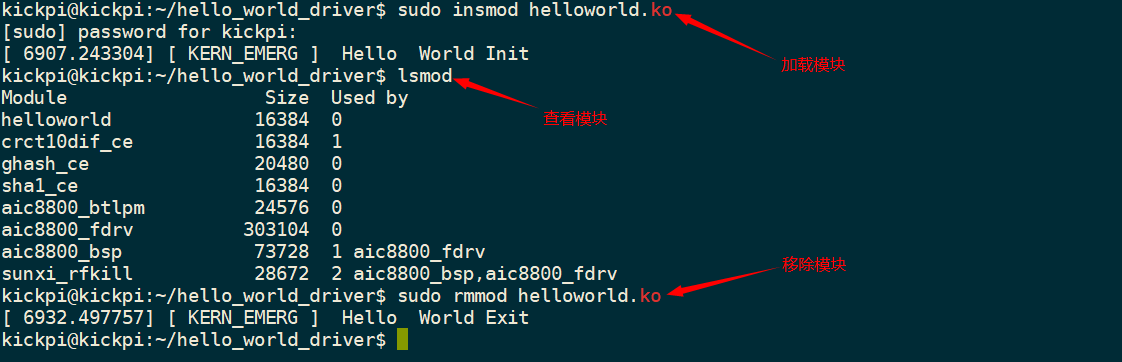
4、加载内核模块