B树、B+树、B*树深度探索与解析:为什么数据库青睐于它们?
文章目录
- 一、B树的概念介绍
- 二、B树的性质
- 三、手搓B树插入功能
- 1. 先定义B树的节点结构
- 2. 查找插入位置:FindNode函数
- 3. 插入关键字到节点:InsertKey函数
- 4. 关键一步:节点分裂(解决溢出)
- 四、简要说明:B树删除
- 五、性能分析
- 1. 时间复杂度分析
- 2. 与二叉搜索树的对比
- 3. 阶数M对性能的影响
- 4. 缓存友好性
- 5. 实际应用中的性能表现
- 六、B树有什么价值?
- 七、B+树和B*树
- B+树
- B+树插入过程:
- B+树的特性:
- B*树
- B+树的分裂:
- B*树的分裂:
- B 树 vs B+ 树 vs B* 树对比
- 八、B树的应用
- 索引
- MySQL索引简介
- InnoDB
- 聚簇索引(主键索引)的 B+ 树结构
- 辅助索引的 B+ 树结构
- MyISAM
一、B树的概念介绍
提到“树”这种数据结构,咱们先想到的可能是二叉树、二叉搜索树。但如果数据量大到需要存在硬盘上(比如数据库里的海量数据),二叉树就有点“力不从心”了——它的高度可能很高,导致频繁的磁盘IO,效率大打折扣。
这时候,B树就该登场了。B树是一种多路平衡查找树,它的核心特点是“多路”——一个节点可以存储多个关键字,并有多个子树。这种结构能显著降低树的高度,减少磁盘访问次数,因此多用于数据库索引、文件系统等场景。
简单说,B树就像一个目录:一个目录下可以放多个文件(关键字),也可以包含多个子目录(子树),而且所有最底层的目录(叶节点)都在同一层,找东西时不用翻来翻去。
二、B树的性质
B树有严格的性质,以“阶数为M”的B树为例(M是一个大于2的整数,决定了节点能存多少关键字):
- 关键字数量:每个节点最多能存
M-1个关键字(比如M=3时,最多2个关键字);非根节点最少得有⌈M/2⌉ - 1个关键字(比如M=3时,最少1个;M=4时,最少1个);根节点特殊,最少可以只有1个关键字。 - 子树数量:有
n个关键字的节点,一定有n+1个子树(比如2个关键字的节点,有3个子树)。 - 有序性:节点内的关键字按升序排列,且某个子树里的所有关键字,一定介于它左右相邻的两个关键字之间(比如节点有关键字[5,8],左子树的关键字都小于5,中间子树的都在5-8之间,右子树的都大于8)。
- 平衡性:所有叶节点都在同一层,保证查找时不会出现“一条路特别长”的情况。
三、手搓B树插入功能
理解了性质,咱们来看看B树的插入功能是怎么实现的。以下代码基于C++,实现了一个模板类BTree<K, M>(K是关键字类型,M是阶数)。
1. 先定义B树的节点结构
B树的节点是存储关键字和子树的“容器”,咱们先定义它的结构:
template<class K, size_t M>
struct BTreeNode
{K _keys[M];// 最多存M个关键字(实际有效是n个,n<=M-1)BTreeNode<K, M>* _childs[M + 1];// 子树指针,数量比关键字多1BTreeNode<K, M>* _parent;// 父节点指针size_t n;// 当前有效关键字数量BTreeNode(): _parent(nullptr), n(0){// 初始化关键字和子树指针for (int i = 0; i < M; i++){_keys[i] = K();_childs[i] = nullptr;}_childs[M] = nullptr;}
};
这里有个细节:_keys数组大小是M,但实际最多只用M-1个(因为节点关键字不能超过M-1);_childs数组大小是M+1,刚好比关键字数量多1,符合B树的性质。
2. 查找插入位置:FindNode函数
插入关键字前,得先找到该插在哪个节点里。FindNode函数的作用就是:如果关键字已存在,返回它所在的节点和索引;如果不存在,返回它应该插入的父节点和-1(表示未找到)。
pair<Node*, int> FindNode(const K& key)
{Node* cur = _root;Node* parent = nullptr;while (cur){int i = 0;for (; i < (int)cur->n; i++){if (key < cur->_keys[i]){// 关键字比当前小,去左子树找break;}else if (key > cur->_keys[i]){// 关键字比当前大,继续往后找continue;}else{// 找到关键字,返回节点和索引return { cur, i };}}// 没找到,记录父节点,继续往下找子树parent = cur;cur = cur->_childs[i];}// 找到最底层,返回父节点(就是要插入的节点)return { parent, -1 };
}
逻辑很直观:从根节点开始,按关键字大小遍历当前节点的关键字,小于就去左子树,大于就继续往后,直到找到位置或走到叶节点。
3. 插入关键字到节点:InsertKey函数
找到要插入的节点后,需要把关键字插入到节点的合适位置(保持有序),同时可能还要插入一个子树(分裂时会用到)。
void InsertKey(Node* cur, const K& key, Node* child)
{int youxu = cur->n - 1; // 从最后一个有效关键字开始K tmp = key;// 从后往前挪,给新关键字腾位置while (youxu >= 0){if (tmp < cur->_keys[youxu]){// 当前关键字比新的大,往后挪一位cur->_keys[youxu + 1] = cur->_keys[youxu];cur->_childs[youxu + 2] = cur->_childs[youxu + 1];// 子树也跟着挪youxu--;}else{// 找到位置了,跳出循环break;}}// 插入新关键字和子树cur->_keys[youxu + 1] = tmp;cur->_childs[youxu + 2] = child;cur->n++;// 有效关键字数量+1if (child){child->_parent = cur;// 更新子树的父节点}
}
这步类似数组的插入:从后往前移动元素,给新元素腾出位置,保证插入后节点内的关键字依然有序。
4. 关键一步:节点分裂(解决溢出)
B树插入最核心的操作是“分裂”。因为每个节点最多只能存M-1个关键字,如果插入后关键字数量达到M,就触发“溢出”,必须分裂成两个节点,否则就违反了B树的性质。
整个插入流程在Insert函数中实现:
bool Insert(const K& key)
{// 空树,直接创建根节点if (_root == nullptr){Node* newnode = new Node();newnode->_keys[0] = key;newnode->n = 1;_root = newnode;return true;}// 先检查关键字是否已存在pair<Node*, int> ret = FindNode(key);if (ret.second != -1){// 已存在,插入失败return false;}Node* cur = ret.first; // 要插入的节点K insertkey = key;Node* child = nullptr;while (true){// 插入关键字到当前节点InsertKey(cur, insertkey, child);// 如果节点关键字数量小于M,插入成功if (cur->n < M){return true;}// 否则,节点溢出,需要分裂int mid = M / 2; // 中间位置(分裂点)Node* brother = new Node(); // 分裂出的兄弟节点// 把mid右边的关键字和子树移到兄弟节点int i = mid + 1;int j = 0;for (; i < M; i++, j++){brother->_keys[j] = cur->_keys[i];brother->_childs[j] = cur->_childs[i];if (cur->_childs[i]){cur->_childs[i]->_parent = brother; // 更新子树的父节点}// 清空当前节点的对应位置cur->_keys[i] = K();cur->_childs[i] = nullptr;}// 移动最后一个子树brother->_childs[j] = cur->_childs[i];if (cur->_childs[i]){cur->_childs[i]->_parent = brother;}cur->_childs[i] = nullptr;// 更新两个节点的有效关键字数量brother->n = j;cur->n -= (j + 1); // 减去mid和右边的j个// 中间的关键字(mid位置)要上移到父节点K newkey = cur->_keys[mid];cur->_keys[mid] = K(); // 清空当前节点的mid位置// 如果当前节点是根节点,需要创建新的根节点if (cur->_parent == nullptr){_root = new Node();_root->_keys[0] = newkey;_root->_childs[0] = cur;_root->_childs[1] = brother;_root->n = 1;cur->_parent = _root;brother->_parent = _root;return true;}else{// 不是根节点,继续往上处理(父节点可能也要分裂)cur = cur->_parent;insertkey = newkey;child = brother;}}
}
分裂的逻辑可以总结为3步:
- 找到中间位置
mid = M/2,把mid右边的关键字和子树移到新的兄弟节点; - 把
mid位置的关键字“上移”到父节点; - 如果父节点也溢出,重复分裂过程,直到没有溢出(如果根节点分裂,树的高度会+1)。
比如M=3(最多2个关键字)的B树,插入第3个关键字时就会分裂:中间的关键字上移,左右各留1个,形成两个子节点。

四、简要说明:B树删除
B树的删除操作比插入复杂,主要因为删除后可能导致节点关键字数量低于最小值,需要进行调整,这里不做具体实现,基本流程如下:
- 定位节点:找到要删除的关键字所在的节点
- 删除关键字:
- 若为叶节点,直接删除
- 若为非叶节点,用其前驱或后继关键字替换后删除
- 平衡调整:
- 若删除后节点关键字数仍满足最小值,操作结束
- 若不满足,先尝试从兄弟节点"借"一个关键字(同时更新父节点对应关键字)
- 若兄弟节点也无多余关键字,则与兄弟节点及父节点中间关键字合并
这个过程可能引发连锁反应,需要从叶节点一直向上调整到根节点,确保所有节点都满足B树的性质。

五、性能分析
B树的设计初衷是为了优化外存(如硬盘)中的数据访问,其性能优势主要体现在以下几个方面:
1. 时间复杂度分析
- 查找操作:最坏情况下需要访问树的高度
h个节点,时间复杂度为O(h·logM),其中h是树的高度,logM是每个节点内查找关键字的时间(可采用二分查找)。 - 插入操作:查找位置
O(h·logM)+ 插入关键字O(M)(节点内移动元素) + 可能的分裂操作O(M)(最多h次分裂),整体仍为O(h·M)。 - 删除操作:类似插入,时间复杂度为
O(h·M),因为可能需要多次合并或借调操作。
由于B树的高度h非常小(对于M=1000的B树,存储1亿个关键字的高度仅为3-4),所以实际性能非常优异。
2. 与二叉搜索树的对比
| 特性 | 二叉搜索树 | B树(M阶) |
|---|---|---|
| 树高度 | O(logN),但可能退化为O(N) | 严格O(log_M N),非常稳定 |
| 磁盘IO次数 | O(h),h可能很大 | O(h),h很小(通常3-5) |
| 节点利用率 | 每个节点只存1个关键字 | 每个节点存O(M)个关键字 |
| 适合场景 | 内存中的小规模数据 | 外存中的大规模数据 |
对于存储在硬盘上的1亿条数据,二叉树可能需要30次IO操作,而M=1000的B树仅需要3-4次,性能差异显著。
3. 阶数M对性能的影响
阶数M是影响B树性能的关键参数:
- M越大,树高h越小:减少IO次数,但节点内的关键字查找时间增加
- M太小,树高h增大:增加IO次数,但节点内操作更快
实际应用中,M的选择通常与磁盘块大小匹配(如4KB磁盘块,M约为300-400),使每个B树节点刚好占用一个磁盘块,最大化单次IO的利用率。
4. 缓存友好性
B树的节点结构天然适合现代计算机的缓存机制:
- 一次加载一个节点到内存,可访问多个关键字
- 相邻节点通常在磁盘上物理位置接近,利于预读
- 节点内关键字连续存储,可高效利用CPU缓存
这种特性进一步提升了B树在实际应用中的性能表现。
5. 实际应用中的性能表现
在数据库系统中,B树(及变种B+树)作为索引结构时:
- 单条记录查询通常只需2-4次磁盘IO
- 范围查询可通过节点内连续扫描高效完成
- 插入删除操作不会导致索引结构剧烈变化,性能稳定
相比其他数据结构,B树在大数据量、高IO成本的场景下优势明显。
六、B树有什么价值?
B树通过"多路存储"和"平衡结构"的设计,完美解决了大量数据在外存中的高效访问问题。它的核心优势在于:
- 低树高设计,显著减少磁盘IO次数
- 严格的平衡性保证,提供稳定的查询性能
- 节点结构与磁盘存储特性匹配,IO效率高
- 支持高效的插入、删除和范围查询操作
理解B树的原理和实现,不仅能帮助我们更好地使用数据库等系统,也能培养我们从"内存思维"到"外存思维"的转变——在处理大规模数据时,减少IO操作往往比优化内存计算更重要。
七、B+树和B*树
B+树
B+树是B树的变形,是在B树基础上优化的多路平衡搜索树,B+树的规则跟B树基本类似,但是又
在B树的基础上做了以下几点改进优化:(注意这里不同版本可能实现不同,但原理都是类似的)
- 分支节点的子树指针与关键字个数相同
- 分支节点的子树指针p[i]指向关键字值大小在[k[i],k[i+1])区间之间
- 所有叶子节点增加一个链接指针链接在一起(这一点非常重要,这样我们去顺序查找的时候就不需要进行中序遍历了,可以直接根据链表来查找)
- 所有关键字及其映射数据都在叶子节点出现

分支节点与叶子节点有重复的值,分支节点存的是叶子节点索引。父亲中存的是孩子节点中的最小值做索引。
B+树插入过程:
B+树的插入过程和B树类似,细节区别在于:第一次插入两层节点,一层做分支,一层做根,如果比第一个数大,就向叶子节点去插入,比第一个数小,就将索引更新为这个值,随后插入叶子节点,叶子节点满后分裂一半给兄弟节点,后往父亲插入一个关键字(兄弟节点中的最小值)和一个孩子…
B+树的特性:
- 所有关键字都出现在叶子节点的链表中,且链表中的节点都是有序的。
- 不可能在分支节点中命中。
- 分支节点相当于是叶子节点的索引,叶子节点才是存储数据的数据层。
B*树
B*树是B+树的变形:在B+树的分支节点增加指向兄弟节点的指针。
B+树节点原来关键字个数最少是1/2M,B*树要求节点关键字最少是2/3M,最多是M

B+树的分裂:
当一个结点满时,分配一个新的结点,并将原结点中1/2的数据复制到新结点,最后在父结点中增加新结点的指针;B+树的分裂只影响原结点和父结点,而不会影响兄弟结点,所以它不需要指向兄弟的指针。
B*树的分裂:
当一个结点满时,如果它的下一个兄弟结点未满,那么将一部分数据移到兄弟结点中,再在原结点插入关键字,最后修改父结点中兄弟结点的关键字;如果兄弟也满了,则在原结点与兄弟结点之间增加新结点,并各复制1/3的数据到新结点,最后在父结点增加新结点的指针。
B 树 vs B+ 树 vs B* 树对比
| 对比维度 | B 树 | B+ 树 | B* 树 |
|---|---|---|---|
| 节点关键字数量 | 非根非叶节点:关键字数在 ⌈M/2⌉ - 1 到 M-1 之间(M 为阶数);根节点非叶时最少含 2 个关键字 | 非根非叶节点:关键字数在 ⌈M/2⌉ 到 M 之间(子树指针数 = 关键字数) | 非根非叶节点:关键字数至少为 ⌈2M/3⌉(节点最低使用率 2/3,高于 B+ 树的 1/2) |
| 数据存储位置 | 所有节点(非叶、叶节点)都存储关键字及对应数据 | 仅叶子节点存储全部关键字和数据;非叶节点是 “索引”(仅存关键字,无对应数据) | 仅叶子节点存储全部关键字和数据;非叶节点是 “索引”(仅存关键字,无对应数据) |
| 叶子节点特性 | 所有叶子节点在同一层,但无链表连接 | 所有叶子节点在同一层,且通过单向 / 双向链表连接(便于范围查询) | 所有叶子节点在同一层,且通过单向 / 双向链表连接(便于范围查询) |
| 查找结束位置 | 可在非叶节点命中(找到关键字后直接返回对应数据) | 必须到叶子节点才命中(非叶节点仅做 “索引指引”,不存实际数据) | 必须到叶子节点才命中(非叶节点仅做 “索引指引”,不存实际数据) |
| 节点分裂策略 | 节点满时,分裂为两个新节点,各含约 M/2 个关键字,父节点新增子节点指针 | 节点满时,分裂出一个新节点,原节点复制约 1/2 数据到新节点,父节点新增子节点指针 | 优先尝试向兄弟节点转移数据(若兄弟节点未满);若兄弟也满,才分裂为三个节点,各含约 1/3 数据,父节点新增子节点指针(分裂概率更低) |
| 空间利用率 | 非根非叶节点最低使用率 1/2 | 非根非叶节点最低使用率 1/2 | 非根非叶节点最低使用率 2/3,空间利用率更高 |
| 典型应用场景 | 早期文件系统、少数数据库(现在较少直接使用) | 数据库索引(如 MySQL InnoDB 的主键 / 辅助索引)、现代文件系统 | 对空间利用率要求极高的场景(是 B+ 树的优化变体,实际直接使用场景少于 B+ 树) |
八、B树的应用
索引
B树最常见的应用就是用来做索引。索引通俗的说就是为了方便用户快速找到所寻之物,MySQL官方对索引的定义为:索引(index)是帮助MySQL高效获取数据的数据结构,简单来说:索引就是数据结构。
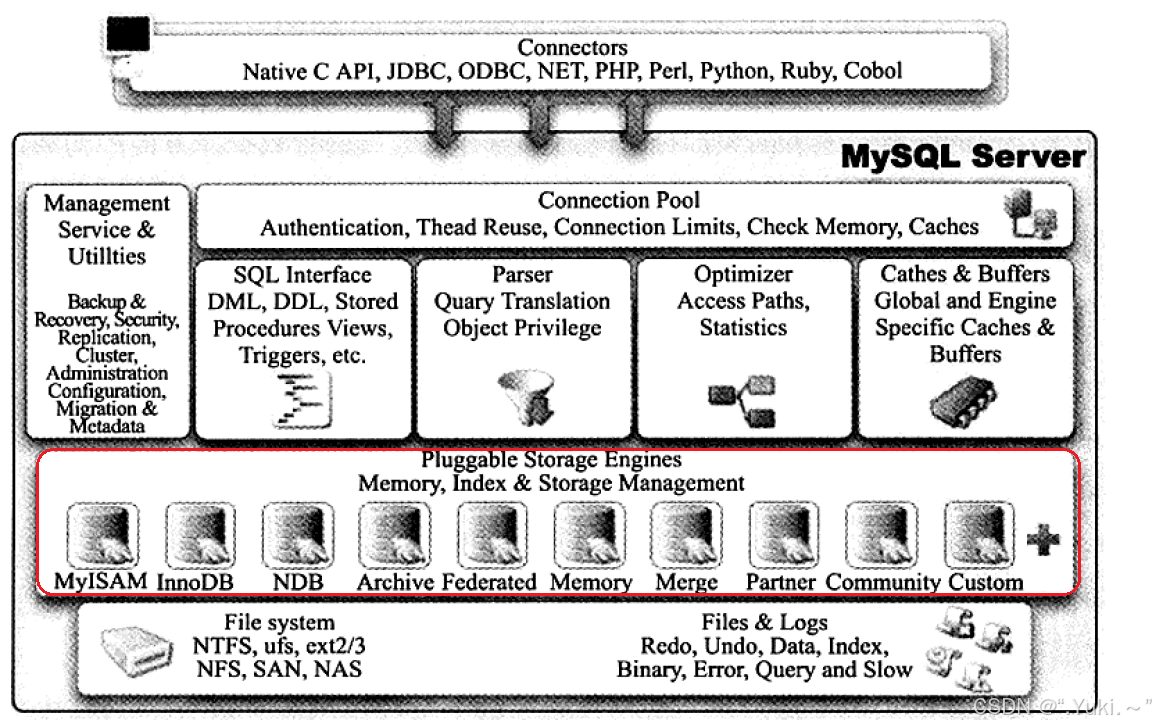
MySQL索引简介
MySQL中索引属于存储引擎级别的概念,不同存储引擎对索引的实现方式是不同的:
InnoDB
InnoDB 是 MySQL 的默认存储引擎,支持事务、行级锁和外键,其索引设计与数据存储深度耦合,以聚簇索引(主键索引)为核心,辅助索引依赖聚簇索引,两者均基于 B+ 树实现。
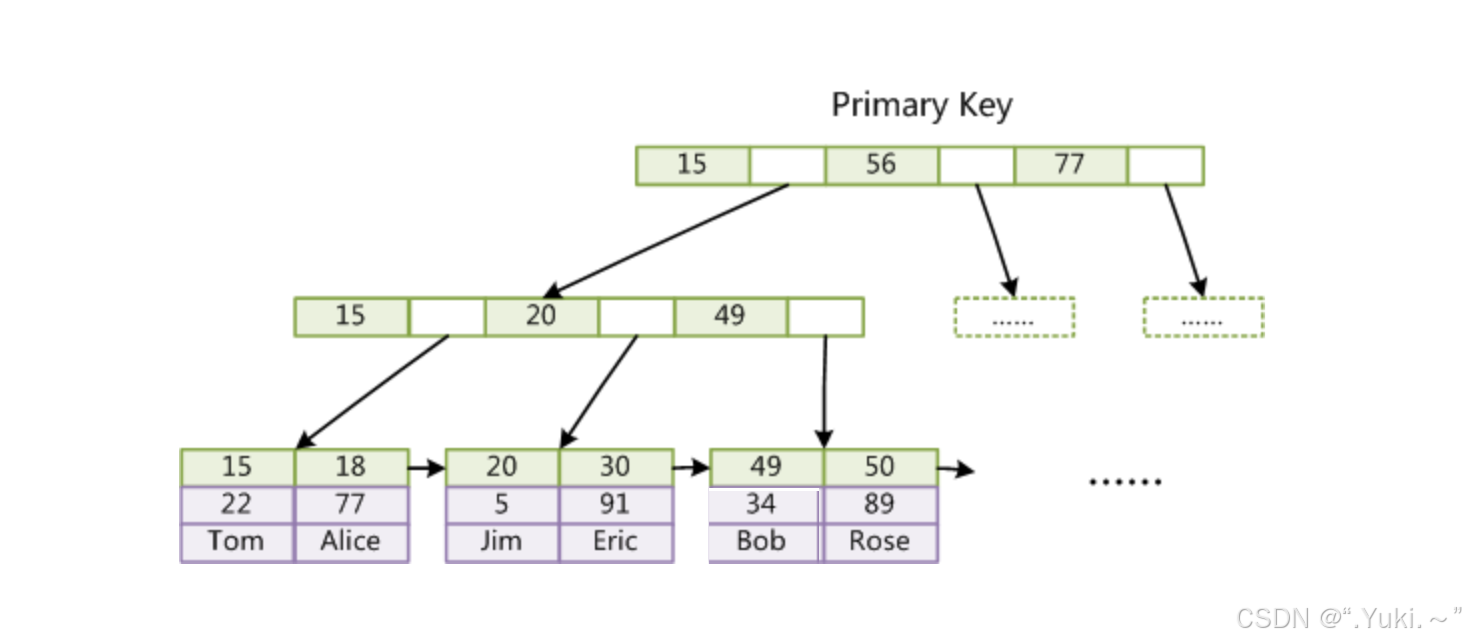
聚簇索引(主键索引)的 B+ 树结构
InnoDB 的聚簇索引直接将 数据与索引融合,B+ 树的叶子节点不再存储 “数据指针”,而是直接存储 整行数据(除主键外的其他字段内容)。
非叶子节点:存储 “主键值 + 子节点指针”,仅用于定位叶子节点的位置。
叶子节点:存储 “完整行数据”,且按主键顺序排序。
示例:若表 user 以 id 为主键,其聚簇索引的 B+ 树结构如下:
非叶子节点(上层):[100, 指针A] → [200, 指针B] → [300, 指针C]↓ ↓ ↓
非叶子节点(下层):[101, 指针A1] [102, 指针A2] ... [201, 指针B1] ...↓ ↓ ↓
叶子节点(数据): (id=101, name=张三, age=20) (id=102, name=李四, age=25) ... (id=201, name=王五, age=30) ...
关键特点:
聚簇索引即 “数据本身”,查询主键时无需额外访问数据文件(直接从 B+ 树叶子节点获取数据),效率极高。
InnoDB 要求表必须有聚簇索引:
若显式定义 PRIMARY KEY,则该主键为聚簇索引;
若无主键,选择第一个 唯一非空索引 作为聚簇索引;
若既无主键也无唯一非空索引,InnoDB 会自动生成一个隐藏的 6 字节自增主键(DB_ROW_ID)作为聚簇索引。
辅助索引的 B+ 树结构
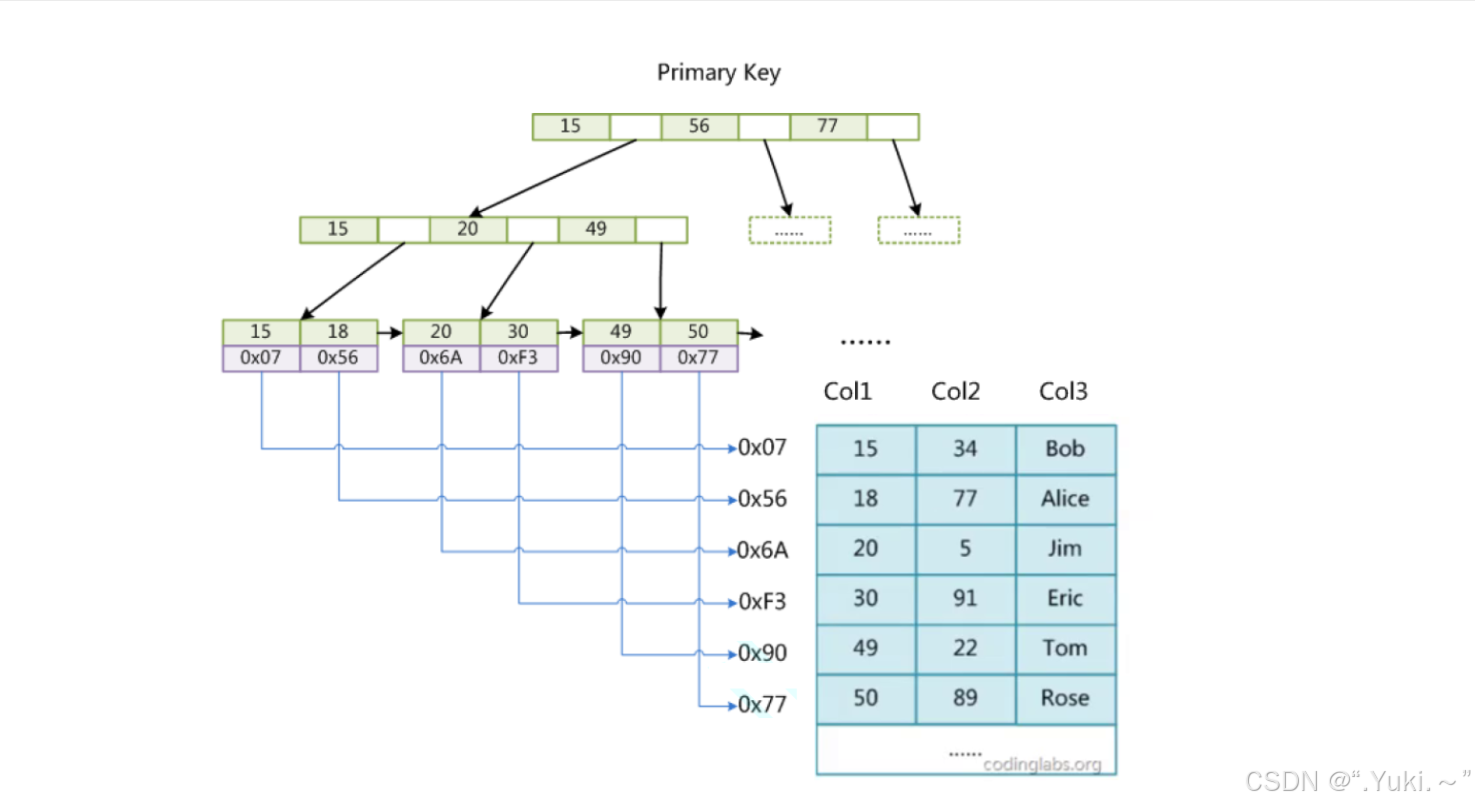
除主键外,其他字段(如 name、age)创建的索引均为辅助索引,其 B+ 树结构与聚簇索引不同:
非叶子节点:存储 “辅助索引键(如 name) + 子节点指针”,用于定位叶子节点。
叶子节点:不存储整行数据,仅存储 对应的主键值(如 id=101)。
查询流程:通过辅助索引查询时,需经历 “两次 B+ 树检索”(即 “回表”):
先在辅助索引的 B+ 树中,根据辅助键找到对应的 主键值;
再到聚簇索引的 B+ 树中,根据主键值找到完整行数据。
示例:若为 user 表的 name 字段创建辅助索引,查询 WHERE name=‘张三’ 的流程:
辅助索引 B+ 树:根据 name=‘张三’ 找到叶子节点中的主键 id=101;
聚簇索引 B+ 树:根据 id=101 找到叶子节点中的完整数据 (101, 张三, 20)。
MyISAM
MyISAM 是 MySQL 早期的存储引擎,不支持事务和行级锁,仅支持表级锁,其索引设计的核心是 索引与数据完全分离,所有索引(包括主键索引)均为非聚簇索引,B+ 树的叶子节点仅存储 “数据的物理地址”(而非数据本身)。
MyISAM 中,主键索引和辅助索引的 B+ 树结构 完全一致,仅索引键不同:
非叶子节点:存储 “索引键(主键或辅助键) + 子节点指针”,用于定位叶子节点。
叶子节点:存储 “数据的物理地址”(即数据在 .MYD 文件中的偏移量,.MYD 是 MyISAM 的数据文件)。
关键特点:
索引与数据分离:索引存储在 .MYI 文件(MyISAM 索引文件),数据存储在 .MYD 文件,查询时需先通过 B+ 树找到物理地址,再到 .MYD 文件中读取数据(一次索引检索 + 一次数据检索)。
主键无特殊地位:MyISAM 的主键可重复(甚至允许为 NULL),因为它仅作为普通索引键,叶子节点存储的是物理地址,而非数据本身,无需保证唯一性(但实际业务中仍建议主键唯一)。