socketpair深度解析:Linux中的“对讲机“创建器
大家好!今天我想和大家聊聊Linux系统中一个非常有趣且实用的函数——socketpair。在开始技术细节之前,让我先讲个小故事。
想象一下,你和你的好朋友被困在一个没有手机信号的荒岛上,但你们需要频繁地交换信息。这时候,如果有一对神奇的对讲机就好了——无论谁想说话,拿起对讲机就能直接沟通,而且两个对讲机之间有一条看不见的线连着,专门为你们服务。socketpair就是Linux内核中制造这种"神奇对讲机"的工厂!
1. 什么是socketpair?生活中的对讲机比喻
socketpair 就像是那个制造对讲机的神奇工具:
- 它一次制造出两个完全匹配的对讲机(套接字)
- 这两个对讲机之间有一条直接的、私密的连接线
- 拿起任何一个对讲机说话,另一个就能立即听到
- 两个对讲机都可以同时说话和收听(全双工)
与普通的管道(pipe)相比,socketpair更加灵活。普通的管道就像是单方向的传声筒,只能一端说、另一端听,而socketpair则是真正的对讲机,双方可以自由对话。
常见使用场景:
- 进程间通信:父子进程、兄弟进程之间的数据交换
- 线程间通信:同一进程内不同线程之间的消息传递
- 文件描述符传递:通过套接字传递打开的文件描述符
- 事件通知机制:用于线程同步或事件触发
- 测试和模拟:在单元测试中模拟网络通信
2. 函数的"身份证明":声明与来源
让我们先看看这个函数的官方"身份证":
#include <sys/types.h>
#include <sys/socket.h>int socketpair(int domain, int type, int protocol, int sv[2]);
头文件:
<sys/types.h>:基本系统数据类型<sys/socket.h>:套接字相关函数和数据结构
库归属:这是POSIX标准的一部分,属于glibc库。POSIX就像是一个国际标准组织,确保在不同Unix-like系统上,这些函数的行为基本一致。
3. 返回值:制造对讲机的"质检报告"
当socketpair这个"工厂"尝试为你制造一对对讲机时,它会返回一个"质检报告":
- 返回0:制造成功!两个完美的对讲机已经放在
sv数组里了 - 返回-1:制造失败!具体原因记录在
errno这个"故障记录本"中
常见的故障原因:
EMFILE:进程打开的文件描述符太多了(对讲机库存满了)EAFNOSUPPORT:不支持的地址族(要制造的对讲机型号不存在)EPROTONOSUPPORT:不支持的协议(通信规则不被认可)EOPNOTSUPP:指定的套接字类型不支持在这个域中使用
4. 参数详解:对讲机的"定制选项"
现在我们来仔细看看制造对讲机时可以选择的"定制选项":
4.1 int domain - 通信家族
这决定了这对套接字将在哪个"通信家族"中工作:
- AF_UNIX(或AF_LOCAL):同一台机器内的通信(最常用)
- AF_INET:IPv4网络通信(理论上可用,但很少用于socketpair)
在绝大多数情况下,我们都选择AF_UNIX,因为我们通常在同一台机器内使用socketpair。
4.2 int type - 通信类型
这决定了数据传输的"工作方式":
- SOCK_STREAM:面向连接的字节流(像电话通话,最常用)
- SOCK_DGRAM:无连接的数据报(像寄明信片)
对于socketpair,我们几乎总是选择SOCK_STREAM,因为它提供可靠的、顺序的字节流服务。
4.3 int protocol - 专用协议
通常设置为0,表示使用默认协议。对于AF_UNIX套接字,这个参数被忽略,但为了代码清晰,我们显式地设为0。
4.4 int sv[2] - 对讲机存放处
这是一个长度为2的整数数组,成功调用后,两个套接字描述符就存放在这里:
sv[0]:第一个套接字描述符sv[1]:第二个套接字描述符
这两个描述符是平等的,没有主从之分,就像一对完全相同的对讲机。
5. socketpair的核心工作机制
为了更直观地理解socketpair的工作原理,让我们用Mermaid图来展示其核心机制:
这个图清晰地展示了:
- 两个套接字描述符通过内核缓冲区相连
- 数据可以双向流动(实线箭头表示)
- 通信完全在内核中完成,不经过网络协议栈
- 这是一个完全对称的通信通道
6. 实战演练:三个典型示例
现在,让我们通过三个实际的例子,来看看这对"对讲机"在不同场景下的表现。
示例1:基础通信演示
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/socket.h>
#include <sys/types.h>#define BUFFER_SIZE 1024int main() {int sockfd[2];pid_t pid;char buffer[BUFFER_SIZE];printf("准备创建一对神奇的对讲机...\n");// 创建socketpairif (socketpair(AF_UNIX, SOCK_STREAM, 0, sockfd) == -1) {perror("socketpair创建失败");exit(1);}printf("对讲机创建成功!fd1=%d, fd2=%d\n", sockfd[0], sockfd[1]);pid = fork();if (pid == -1) {perror("fork失败");exit(1);}if (pid == 0) {// 子进程 - 使用第二个对讲机close(sockfd[0]); // 关闭不需要的对讲机// 从父进程接收消息ssize_t bytes = read(sockfd[1], buffer, BUFFER_SIZE - 1);if (bytes > 0) {buffer[bytes] = '\0';printf("子进程收到: %s", buffer);}// 回复消息const char *reply = "爸爸,我收到你的消息了!\n";write(sockfd[1], reply, strlen(reply));close(sockfd[1]);exit(0);} else {// 父进程 - 使用第一个对讲机close(sockfd[1]); // 关闭不需要的对讲机// 向子进程发送消息const char *message = "孩子,你好吗?\n";printf("父进程发送: %s", message);write(sockfd[0], message, strlen(message));// 等待回复ssize_t bytes = read(sockfd[0], buffer, BUFFER_SIZE - 1);if (bytes > 0) {buffer[bytes] = '\0';printf("父进程收到: %s", buffer);}close(sockfd[0]);wait(NULL); // 等待子进程结束}return 0;
}
说明:这个例子展示了最基本的父子进程通信。父进程创建socketpair后fork出子进程,然后双方通过这对套接字进行对话。
示例2:全双工通信演示
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <pthread.h>#define BUFFER_SIZE 1024typedef struct {int read_fd;int write_fd;const char *name;
} thread_args_t;void *communicate(void *arg) {thread_args_t *args = (thread_args_t *)arg;char buffer[BUFFER_SIZE];for (int i = 0; i < 3; i++) {// 发送消息snprintf(buffer, BUFFER_SIZE, "这是%s的第%d条消息\n", args->name, i + 1);write(args->write_fd, buffer, strlen(buffer));printf("%s 发送: %s", args->name, buffer);// 接收消息ssize_t bytes = read(args->read_fd, buffer, BUFFER_SIZE - 1);if (bytes > 0) {buffer[bytes] = '\0';printf("%s 收到: %s", args->name, buffer);}sleep(1); // 稍微延迟,让输出更清晰}return NULL;
}int main() {int sockfd[2];pthread_t thread1, thread2;printf("演示全双工通信 - 两个线程可以同时说话!\n");if (socketpair(AF_UNIX, SOCK_STREAM, 0, sockfd) == -1) {perror("socketpair失败");exit(1);}// 线程1的参数:从sockfd[0]读,向sockfd[1]写thread_args_t args1 = {sockfd[0], sockfd[1], "线程A"};// 线程2的参数:从sockfd[1]读,向sockfd[0]写 thread_args_t args2 = {sockfd[1], sockfd[0], "线程B"};pthread_create(&thread1, NULL, communicate, &args1);pthread_create(&thread2, NULL, communicate, &args2);pthread_join(thread1, NULL);pthread_join(thread2, NULL);close(sockfd[0]);close(sockfd[1]);printf("全双工通信演示结束!\n");return 0;
}
说明:这个例子展示了socketpair的全双工特性。两个线程可以同时进行读写操作,就像两个人在用对讲机自由对话一样。
示例3:文件描述符传递
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <fcntl.h>
#include <sys/uio.h>void send_fd(int socket, int fd_to_send) {struct msghdr msg = {0};struct cmsghdr *cmsg;char buf[CMSG_SPACE(sizeof(fd_to_send))];char dummy_data = '!';struct iovec io = {.iov_base = &dummy_data,.iov_len = 1};msg.msg_iov = &io;msg.msg_iovlen = 1;msg.msg_control = buf;msg.msg_controllen = sizeof(buf);cmsg = CMSG_FIRSTHDR(&msg);cmsg->cmsg_level = SOL_SOCKET;cmsg->cmsg_type = SCM_RIGHTS;cmsg->cmsg_len = CMSG_LEN(sizeof(fd_to_send));memcpy(CMSG_DATA(cmsg), &fd_to_send, sizeof(fd_to_send));msg.msg_controllen = cmsg->cmsg_len;if (sendmsg(socket, &msg, 0) < 0) {perror("sendmsg");}
}int receive_fd(int socket) {struct msghdr msg = {0};struct cmsghdr *cmsg;char buf[CMSG_SPACE(sizeof(int))];char dummy_data;int received_fd;struct iovec io = {.iov_base = &dummy_data,.iov_len = 1};msg.msg_iov = &io;msg.msg_iovlen = 1;msg.msg_control = buf;msg.msg_controllen = sizeof(buf);if (recvmsg(socket, &msg, 0) < 0) {perror("recvmsg");return -1;}cmsg = CMSG_FIRSTHDR(&msg);if (cmsg && cmsg->cmsg_level == SOL_SOCKET && cmsg->cmsg_type == SCM_RIGHTS) {memcpy(&received_fd, CMSG_DATA(cmsg), sizeof(received_fd));return received_fd;}return -1;
}int main() {int sockfd[2];pid_t pid;printf("文件描述符传递演示\n");if (socketpair(AF_UNIX, SOCK_STREAM, 0, sockfd) == -1) {perror("socketpair");exit(1);}pid = fork();if (pid == -1) {perror("fork");exit(1);}if (pid == 0) {// 子进程:接收文件描述符并读取文件close(sockfd[0]);printf("子进程等待接收文件描述符...\n");int received_fd = receive_fd(sockfd[1]);if (received_fd != -1) {printf("子进程成功接收到文件描述符: %d\n", received_fd);char buffer[256];ssize_t bytes = read(received_fd, buffer, sizeof(buffer) - 1);if (bytes > 0) {buffer[bytes] = '\0';printf("从传递的文件描述符读取到: %s\n", buffer);}close(received_fd);}close(sockfd[1]);exit(0);} else {// 父进程:打开文件并发送文件描述符close(sockfd[1]);// 创建一个临时文件int file_fd = open("/tmp/socketpair_demo.txt", O_CREAT | O_WRONLY | O_TRUNC, 0644);if (file_fd == -1) {perror("open");exit(1);}const char *content = "这是通过socketpair传递的文件描述符写入的内容!\n";write(file_fd, content, strlen(content));close(file_fd);// 重新以只读方式打开file_fd = open("/tmp/socketpair_demo.txt", O_RDONLY);if (file_fd == -1) {perror("open");exit(1);}printf("父进程打开文件,描述符=%d,准备发送给子进程...\n", file_fd);send_fd(sockfd[0], file_fd);close(file_fd);close(sockfd[0]);wait(NULL); // 等待子进程// 清理临时文件unlink("/tmp/socketpair_demo.txt");}return 0;
}
说明:这个高级示例展示了如何使用socketpair传递文件描述符。这是Unix系统编程中的一个强大特性,允许进程间共享打开的文件。
7. 编译与运行
编译命令:
gcc -o socketpair_demo socketpair_demo.c
对于使用线程的示例2:
gcc -o socketpair_thread socketpair_thread.c -lpthread
Makefile片段:
CC=gcc
CFLAGS=-Wall -g
LDFLAGS=-lpthreadall: demo1 demo2 demo3demo1: example1_basic.c$(CC) $(CFLAGS) -o $@ $<demo2: example2_full_duplex.c$(CC) $(CFLAGS) -o $@ $< $(LDFLAGS)demo3: example3_fd_passing.c$(CC) $(CFLAGS) -o $@ $<clean:rm -f demo1 demo2 demo3
注意事项:
- 确保系统支持Unix域套接字(所有现代Linux都支持)
- 使用线程时记得链接pthread库(-lpthread)
- 文件描述符传递是高级特性,需要理解 ancillary data 的概念
- 总是检查系统调用的返回值,特别是socketpair和fork
8. 执行结果分析
让我们看看示例1的可能输出:
准备创建一对神奇的对讲机...
对讲机创建成功!fd1=3, fd2=4
父进程发送: 孩子,你好吗?
子进程收到: 孩子,你好吗?
父进程收到: 爸爸,我收到你的消息了!
背后的机制:
socketpair创建了两个在内核中相连的套接字fork后子进程继承了这两个文件描述符- 双方各自关闭不需要的描述符,形成单向通信路径
- 数据通过内核缓冲区传递,不经过网络协议栈
- 通信是可靠的、顺序的字节流
9. socketpair vs pipe:为什么选择对讲机?
很多人会问:既然有pipe,为什么还需要socketpair?让我们来对比一下:
| 特性 | pipe | socketpair |
|---|---|---|
| 通信方向 | 半双工(单向) | 全双工(双向) |
| 进程关系 | 通常用于父子进程 | 任意进程关系 |
| 数据类型 | 字节流 | 字节流、数据报、其他 |
| 高级特性 | 基础通信 | 支持文件描述符传递 |
| 使用复杂度 | 简单 | 相对复杂但功能强大 |
选择建议:
- 简单单向数据流:用pipe
- 复杂双向通信:用socketpair
- 需要传递文件描述符:必须用socketpair
10. 实际应用场景深度探索
10.1 进程池通信
在服务器程序中,我们经常使用进程池来处理并发请求。socketpair可以用于管理进程和工作进程之间的通信:
// 简化的进程池管理示例
void manager_worker_communication() {int control_channels[MAX_WORKERS][2];for (int i = 0; i < MAX_WORKERS; i++) {socketpair(AF_UNIX, SOCK_STREAM, 0, control_channels[i]);pid_t pid = fork();if (pid == 0) {// 工作进程close(control_channels[i][0]); // 关闭管理端worker_loop(control_channels[i][1]);exit(0);} else {// 管理进程close(control_channels[i][1]); // 关闭工作端}}
}
10.2 线程同步和通知
socketpair可以用于线程间的事件通知,特别是在复杂的多线程应用中:
// 使用socketpair进行线程事件通知
void event_notification_system() {int notification_fd[2];socketpair(AF_UNIX, SOCK_STREAM, 0, notification_fd);// 线程1:事件生产者// 线程2:事件消费者(使用epoll/select监听notification_fd[1])
}
11. 错误处理和边界情况
健壮的socketpair使用需要考虑各种错误情况:
int create_socketpair_with_retry(int sockfd[2]) {int retries = 3;while (retries-- > 0) {if (socketpair(AF_UNIX, SOCK_STREAM, 0, sockfd) == 0) {return 0; // 成功}if (errno == EMFILE || errno == ENFILE) {// 文件描述符耗尽,等待后重试sleep(1);continue;}// 其他错误不重试break;}return -1; // 失败
}
12. 性能特点和优化建议
性能特点:
- 比网络套接字快得多(不经过网络协议栈)
- 内存拷贝次数最少
- 内核缓冲区的数据传递非常高效
优化建议:
- 适当设置套接字缓冲区大小
- 考虑使用MSG_DONTWAIT标志进行非阻塞IO
- 对于高性能场景,可以使用多个socketpair对来避免锁竞争
- 使用epoll而不是select来监控多个套接字
13. 可视化总结:socketpair的完整生态系统
最后,让我们用一张详细的Mermaid图来总结socketpair在整个Linux系统中的地位和作用:
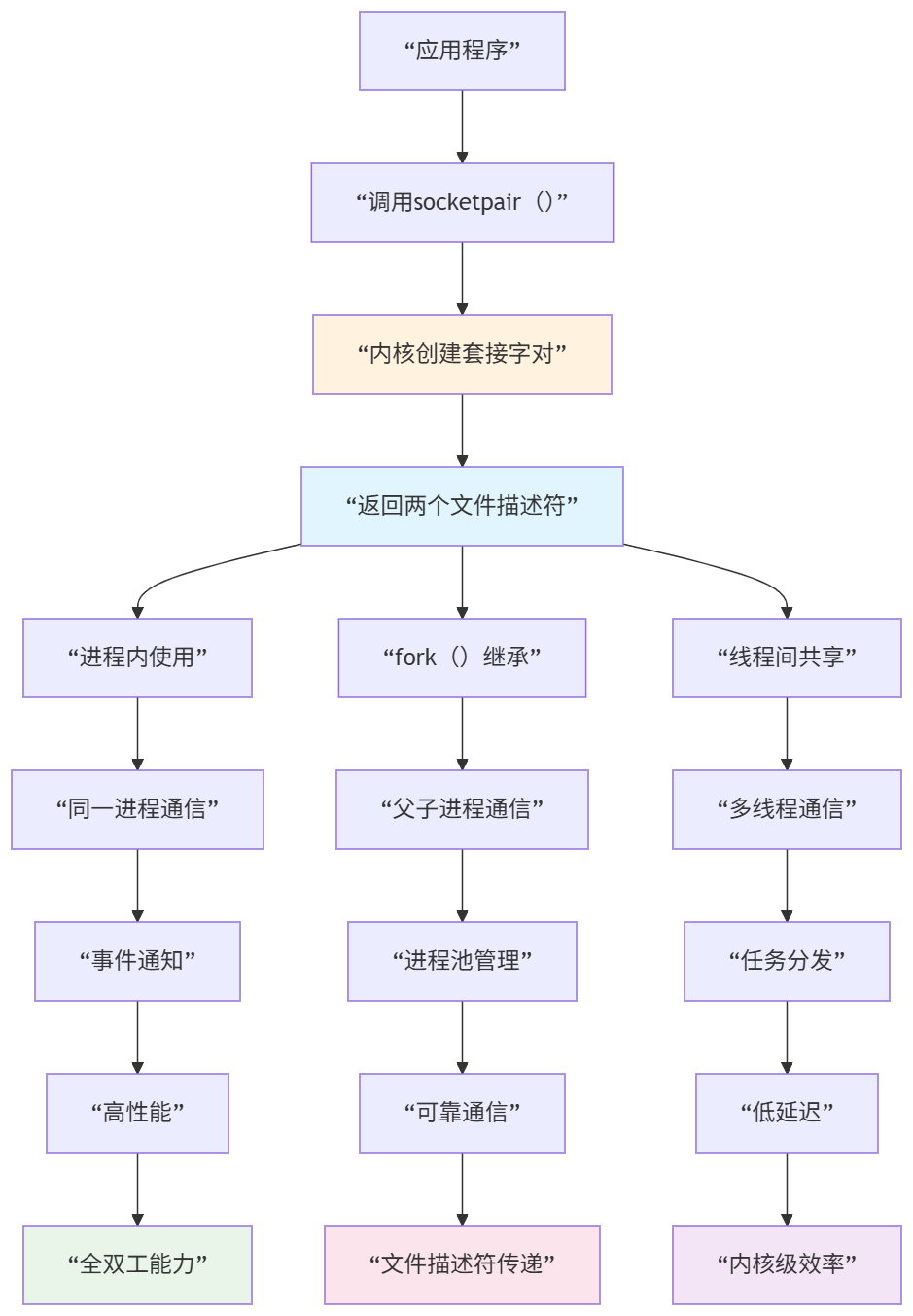
这张图展示了:
- socketpair的创建过程(从应用到内核)
- 三种主要的使用场景(进程内、进程间、线程间)
- 带来的核心优势(高性能、可靠性、低延迟)
- 支撑这些优势的技术特性(全双工、fd传递、内核效率)
14. 结语
通过这次深入的探索,我们希望你现在对socketpair有了全面而深刻的理解。从最初的对讲机比喻,到实际的技术实现,再到复杂的应用场景,这个看似简单的函数其实蕴含着Unix/Linux系统设计的深厚智慧。
记住,socketpair不仅仅是一个创建套接字对的工具,它代表了Linux系统编程中一种重要的通信范式。当你需要在进程或线程之间建立快速、可靠、双向的通信通道时,socketpair往往是最优雅的解决方案。
下次当你面临进程间通信的选择时,不妨想想这对"神奇的对讲机",它可能会成为你工具箱中最得力的助手之一!
Happy coding!愿你在系统编程的海洋中畅游,发现更多像socketpair这样的珍珠!