【硬科普】什么是双频干涉
在绝对距离测量领域,双频干涉仪和斐索干涉仪是两种基于 “拍频信号” 和 “相位累积” 原理的核心技术,它们精准解决了单频干涉在长距离测量中的 “条纹计数误差” 和 “整数级模糊” 问题,实现了米级甚至千米级距离的 μm 级精度测量。下面从 “核心痛点→技术原理→仪器结构→误差解决→实际应用” 五个维度详细拆解。
一、先明确核心背景:单频干涉的局限与 “绝对距离测量” 的需求
要理解双频 / 斐索干涉的价值,需先明确传统单频干涉(如迈克尔逊)在绝对距离测量(直接测量 “初始距离 L₀”,而非 “相对位移 ΔL”)中的两大致命缺陷:
1. 单频干涉的原理与局限
单频干涉通过计数 “干涉条纹移动的条数 N” 计算距离:\(\Delta L = \frac{N\lambda}{2}\)(λ 为波长,除以 2 是因为光往返传播)。但长距离绝对测量时,它面临两个无法解决的问题:
- 问题 1:条纹计数误差米级距离对应数万甚至数百万条条纹(如 λ=632.8 nm,1 米对应≈3160 条往返条纹),环境振动、气流扰动会导致条纹 “闪烁”,极易出现漏计 / 多计,误差随距离累积放大。
- 问题 2:整数级模糊(Integer Ambiguity)单频干涉只能测量 “条纹移动量 N”(相对位移),无法直接给出 “绝对距离 L₀”—— 例如,若初始距离对应 1000.5 条条纹,单频干涉无法区分是 “0.5 条 + 1000 条整数倍” 还是 “0.5 条 + 2000 条整数倍”,必须依赖外部校准(如激光跟踪仪),失去 “绝对测量” 的意义。
2. 绝对距离测量的核心需求
工业(如大型机床校准)、航天(如卫星间测距)等场景需要:
- 直接测量 “0~100 米” 甚至 “公里级” 的绝对距离(无需初始校准);
- 精度达到 μm 级(10⁻⁶米),且误差不随距离累积;
- 抗环境干扰(振动、温度变化)能力强。
双频干涉和斐索干涉通过 “拍频信号” 将 “高频光相位差” 转化为 “低频电信号相位差”,完美解决了上述问题。
二、核心原理:双频干涉的 “拍频信号” 与 “相位累积”
双频干涉的本质是:用两束 “频率接近、偏振正交” 的激光产生 “低频拍频信号”,通过检测拍频信号的 “相位差累积” 计算绝对距离,彻底抛弃 “条纹计数”。
1. 第一步:产生双频激光(核心光源)
双频干涉仪的光源是 “双频激光器”,通过两种方式产生两束相干光:
- 方式 1:塞曼效应(Zeeman Effect)在单频激光器(如氦氖激光)的增益介质外加磁场,激光分裂为两束频率差 Δf(通常 1~100 kHz)、偏振方向垂直的光:高频光 f₁(右旋圆偏振)和低频光 f₂(左旋圆偏振)。
- 方式 2:声光调制器(AOM)单频激光通过两个声光调制器,产生两束频率差 Δf(可调节,如 1 MHz)、偏振正交的光。
关键特征:两束光频率接近(f₁≈f₂,Δf≪f₁、f₂)、偏振正交(可通过偏振片分离)、相位稳定(相干性好)。
2. 第二步:干涉光路与拍频信号的形成(以双频迈克尔逊干涉仪为例)
典型双频干涉仪的光路结构如图所示,核心分为 “分束→传播→合束→探测” 四步:
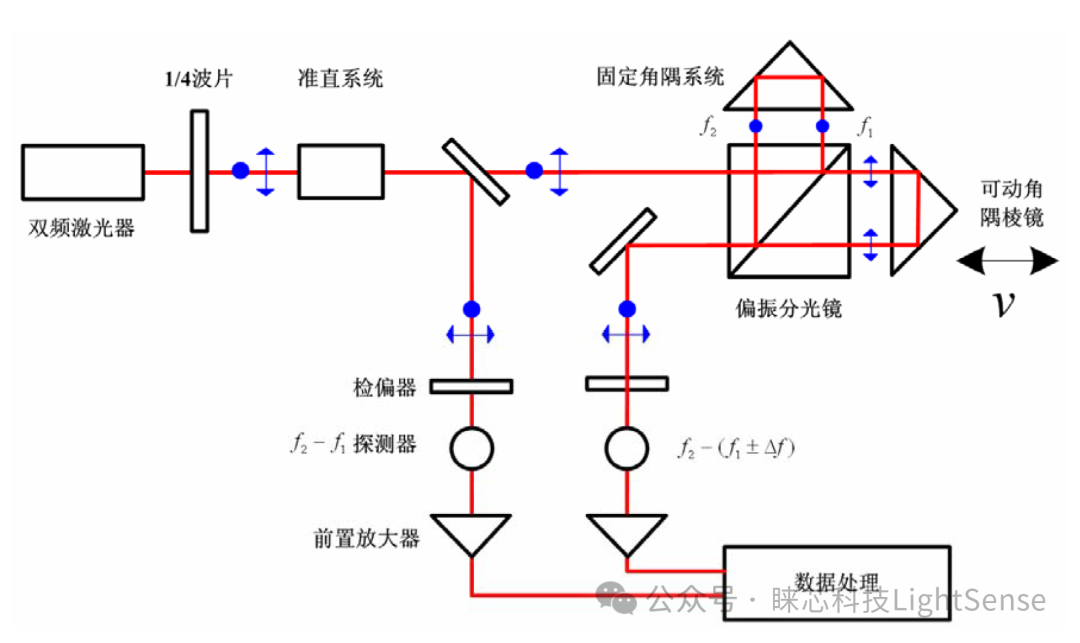
(1)分束:偏振分离两束光
双频激光首先通过偏振分束器(PBS):
- 偏振方向垂直的 f₁光被反射,作为 “测量光” 射向待测物体(测量臂,距离 L);
- 偏振方向水平的 f₂光被透射,作为 “参考光” 射向固定反射镜(参考臂,距离 L₀,固定不变)。
(2)传播:两束光产生光程差
- 测量光:经待测物体反射,传播距离为 2L(往返),相位变化为 φ₁ = 2π×2L/λ₁ = 4πLf₁/c(λ₁=c/f₁,c 为光速);
- 参考光:经固定反射镜反射,传播距离为 2L₀(往返),相位变化为 φ₂ = 4πL₀f₂/c。
(3)合束:偏振混合产生干涉
两束反射光(f₁、f₂)重新回到偏振分束器,通过λ/4 波片将圆偏振转为线偏振,再经检偏器(偏振方向与两束光均成 45°)混合,产生干涉。
(4)探测:将光干涉转化为电信号(拍频信号)
干涉后的光强分布为:\(I = I₁ + I₂ + 2\sqrt{I₁I₂} \cos\left( \phi₁ - \phi₂ + \phi₀ \right)\)其中,\(\phi₀\) 是固定相位差。由于 f₁≠f₂,\(\phi₁ - \phi₂ = 4π(Lf₁ - L₀f₂)/c\) 随时间变化,导致光强以 “差频 Δf = f₁ - f₂” 周期性波动 —— 这种波动被光电探测器转化为低频电信号,即 “拍频信号”:\(V(t) = V₀ \cos(2πΔf \cdot t + Δ\phi)\)其中,Δφ = 4π(Lf₁ - L₀f₂)/c 是拍频信号的 “静态相位差”,也是计算距离的核心变量。
3. 第三步:绝对距离的计算(核心公式推导)
由于 Δf = f₁ - f₂ ≪ f₁、f₂,可近似认为 f₁≈f₂≈f₀(激光中心频率),则:\(Δ\phi ≈ 4πf₀(L - L₀)/c + 4πLΔf/c\)其中:
- 第一项 “4πf₀(L - L₀)/c”:对应单频干涉的相位差,仍存在整数级模糊(因为 Δφ 每增加 2π,无法区分是 L 增加 λ₀/2 还是其他);
- 第二项 “4πLΔf/c”:是双频干涉的 “关键突破”——Δf 是已知常数(如 10 kHz),该项随 L线性累积,且相位差 Δφ 可被精确测量(电子设备可分辨 0.1° 甚至更小的相位变化)。
通过 “高分辨率相位计” 测量 Δφ,结合已知的 Δf、f₀、L₀(参考臂固定,可预先校准),即可直接解算出绝对距离 L:\(L = \frac{c \cdot Δ\phi}{4π(f₀ + Δf)} + L₀\)
核心优势:无需计数条纹,直接通过 “相位差累积” 计算 L,彻底解决了整数级模糊和条纹计数误差。
三、斐索干涉仪:双频原理的 “共光路” 变种,适配短距离高精度
斐索干涉仪是双频干涉的一种特殊结构,核心区别在于 “参考臂” 的设计 —— 它采用 “平面参考镜 + 透明标准件” 的共光路结构,更适合短距离(如 0~1 米)、超高精度(nm 级)的绝对距离测量(如光学元件面形校准、半导体晶圆厚度测量)。
1. 斐索干涉仪的结构特点
与双频迈克尔逊干涉仪的 “分离式参考臂” 不同,斐索干涉仪的光路高度集成:
- 双频激光经扩束镜后,垂直入射到 “半透半反参考镜”(斐索镜);
- 参考镜的 “前表面” 反射部分光作为 “参考光”(f₂);
- 另一部分光透射过参考镜,作为 “测量光”(f₁)射向待测物体(如镜片表面),经物体反射后返回,与参考光汇合产生干涉;
- 由于参考光和测量光共用大部分光路(共光路设计),环境扰动(如振动、温度变化)对两束光的影响基本一致,相位差 Δφ 更稳定,测量精度更高。
2. 应用场景差异:双频 vs 斐索
| 维度 | 双频干涉仪 | 斐索干涉仪 |
|---|---|---|
| 光路结构 | 分离式参考臂(参考光 / 测量光路径不同) | 共光路(参考光 / 测量光路径基本重合) |
| 测量距离 | 长距离(1 米~10 公里,如卫星测距) | 短距离(0~1 米,如元件校准) |
| 精度 | μm 级(10⁻⁶米) | nm 级(10⁻⁹米) |
| 抗环境干扰能力 | 中等(需隔振) | 强(共光路抵消扰动) |
| 核心优势 | 长距离绝对测量 | 短距离超高精度测量 |
四、关键突破:如何避免 “条纹计数误差”?
双频 / 斐索干涉仪通过三个核心设计彻底解决了单频干涉的条纹计数误差:
1. 从 “计数离散条纹” 到 “测量连续相位”
单频干涉检测的是 “条纹移动的整数条数 N”(离散量),漏计 1 条就导致 λ/2 的误差;双频干涉检测的是 “拍频信号的连续相位差 Δφ”(连续量),电子相位计可分辨 0.1° 的相位变化(对应距离误差:ΔL = (0.1°/360°)×(c/(2f₀)) ≈ 0.27 nm,远高于条纹计数精度)。
2. 从 “高频光相位” 到 “低频电信号相位”
光频 f₀≈10¹⁴Hz,直接测量其相位差几乎不可能;双频干涉将相位差转化为 “低频拍频信号”(Δf≈10 kHz),电子设备(如锁相放大器、相位计)可轻松实现高精度相位测量,避免了高频检测的噪声干扰。
3. 从 “相对位移” 到 “绝对距离”
通过 “拍频信号的相位累积项 4πLΔf/c”,L 与 Δφ 呈线性一一对应关系,无需依赖初始校准即可解算绝对距离,彻底消除了 “整数级模糊”—— 这是 “绝对距离测量” 的核心定义。
五、实际应用:从工业机床到太空卫星
双频 / 斐索干涉仪的高精度和绝对测量能力,使其成为多个领域的 “标准测量工具”:
1. 大型机床的长度校准(双频干涉仪)
- 需求:数控机床的导轨长度(如 10 米)需校准到 μm 级精度,确保加工零件的尺寸误差≤5μm;
- 原理:将双频干涉仪的 “测量反射镜” 固定在机床滑台上,“参考反射镜” 固定在床身,滑台移动时实时测量绝对距离,与机床的编码器读数对比,实现校准;
- 优势:抗车间振动能力强,测量速度快(每秒 1000 次采样),可覆盖 100 米内的长距离。
2. 卫星间距离测量(双频干涉仪)
- 需求:卫星编队飞行(如引力波探测卫星 LISA)中,两颗卫星的间距(如 250 万公里)需测量到 μm 级精度,捕捉引力波引起的空间畸变;
- 原理:一颗卫星发射双频激光,另一颗卫星接收并反射,通过测量拍频信号的相位差 Δφ,计算绝对距离;
- 挑战与解决:大气湍流会导致光程波动,通过 “自适应光学” 补偿相位噪声,同时采用 “高稳定双频激光器”(频率稳定性≤10⁻¹⁵)确保精度。
3. 光学元件面形测量(斐索干涉仪)
- 需求:光刻机的透镜表面平整度需≤1 nm,确保光刻图案的精度;
- 原理:斐索干涉仪的测量光照射透镜表面,反射光与参考光产生干涉条纹,条纹的弯曲程度对应表面的高低起伏,通过相位解算得到面形数据;
- 优势:共光路设计抗环境干扰,精度达 0.1 nm,可检测直径 1 米以上的大型透镜。
六、技术局限与优化方向
尽管性能优异,双频 / 斐索干涉仪仍有改进空间:
- 环境干扰:大气折射率随温度、气压变化会影响光程差,可通过 “实时折射率监测仪” 补偿(测量精度≤10⁻⁷);
- 长距离衰减:激光在空气中传播 10 公里后功率衰减严重,可采用 “高功率双频激光器”(如 100 mW)和 “雪崩光电二极管”(高灵敏度探测器);
- 对准难度:两束光需精准对准才能产生稳定拍频,可通过 “自动对准系统”(CCD 相机 + 伺服电机)实现光路自校准。
总结:双频 / 斐索干涉的本质
绝对距离测量的双频 / 斐索干涉技术,是 “将光的高频波动性转化为低频电信号可测性” 的经典案例:
- 用双频激光产生 “差频拍频信号”,降低相位检测难度;
- 用 “相位累积” 替代 “条纹计数”,解决整数级模糊和误差累积;
- 用不同光路结构(分离式 / 共光路)适配长距离 / 短距离场景,实现 μm 级甚至 nm 级精度。
它既是工业制造的 “精度标尺”,也是探索宇宙的 “空间尺子”,是干涉测量技术从 “相对” 走向 “绝对” 的关键突破。