沙姆定律原理/公式推导
定律是摄影、工业视觉等领域中解决倾斜物体全平面清晰成像的核心光学原理,其核心逻辑为:当被拍摄的倾斜主体平面、镜头的等效光学平面、相机传感器所在的成像平面这三个平面调整至相交于同一条直线(沙姆线)时,原本因倾斜导致“不同区域到镜头距离不同”的主体平面,所有景物经镜头折射后均可精准汇聚到成像平面上,从而实现倾斜主体全平面无失焦的清晰成像,打破了传统对焦仅能让与镜头平行的单一焦平面清晰的局限。
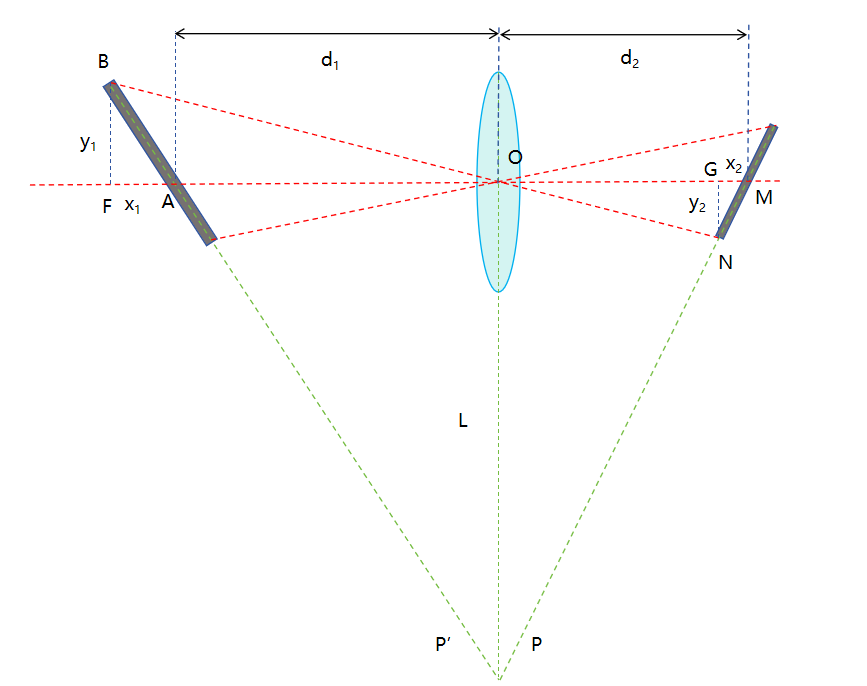
OP为镜头平面,AB为被摄主体平面在主光轴的上半部分,AB的延长线交镜头平面为P’;MN 为上半部分的成像平面,MN的延长线交镜头平面为P;A的像点为M,B的像点为N,f为焦距。图中d1=AO,d2=OM,x1=FA,x2=GM,y1=BF,y2=NG。要证明B点也能在N点清晰成像,需要证明1d1+x1+1d2−x2=1f\frac{1}{\mathrm{d}_1+\mathrm{x}_1}+\frac{1}{\mathrm{d}_2-\mathrm{x}_2}=\frac{1}{f}d1+x11+d2−x21=f1 如果在这个条件下P’与P 共点则说明N点可以清晰成像。
由物体成像公式可得:
①:1d1+1d2=1f①:\frac{1}{d_ {1}}+\frac {1}{d_ {2}}=\frac {1}{f}①:d11+d21=f1
由假设的物体成像公式可得:
②:1d1+x1+1d2−x2=1f②:\frac {1}{d_1+x_1} +\frac {1}{d_2-x_2} =\frac {1}{f}②:d1+x11+d2−x21=f1
由▲OBF和▲ONG 相似有:
y1d1+x1=y2d2−x2\frac{y_1}{d_1+x_1}= \frac{y_2}{d_2-x_2}d1+x1y1=d2−x2y2
即:
③:y1(d1+x1)y2=1d2−x2③:\frac{y_1}{(d_1+x_1)y_2}= \frac{1}{d_2-x_2}③:(d1+x1)y2y1=d2−x21
将③代入②中得:
1d1+x1+y1(d1+x1)y2=1f\frac{1}{d_1+x_1}+ \frac{y_1}{(d_1+x_1)y_2}= \frac{1}{f}d1+x11+(d1+x1)y2y1=f1
1d1+x1(1+y1y2)=1f\frac{1}{d_1+x_1} \left( 1+ \frac{y_1}{y_2} \right)= \frac{1}{f}d1+x11(1+y2y1)=f1
d1+x1=(1+y1y2)fd_1+x_1= \left(1+ \frac{y_1}{y_2} \right) fd1+x1=(1+y2y1)f
可解得:
④:x1=(1+y1y2)f−d1④:x_1= \left( 1+ \frac{y_1}{y_2} \right) f-d_1④:x1=(1+y2y1)f−d1
同样,也可解得:
⑤:x2=d2−(1+y2y1)f⑤:x_2=d_2- \left( 1+ \frac{y_2}{y_1} \right) f⑤:x2=d2−(1+y1y2)f
在▲OBF和▲MNG中有:
⑥:y1=x1⋅tana⑥:y_1=x_1 \cdot \tan a⑥:y1=x1⋅tana
⑦:y2=x2⋅tanB⑦:y_2=x_2 \cdot \tan B⑦:y2=x2⋅tanB
由公式⑥和⑦得:
y1y2=x1x2⋅tanαtanβ\frac{y_1}{y_2}= \frac{x_1}{x_2} \cdot \frac{ \tan \alpha}{ \tan \beta}y2y1=x2x1⋅tanβtanα
将④和⑤代入公式得:
⑧:y1y2=(1+y1y2)f−d1d2−(1+y2y1)f⋅tanαtanβ⑧:\frac{y_{1}}{y_{2}}= \frac{ \left( 1+ \frac{y_{1}}{y_{2}} \right) f-d_{1}}{d_{2}- \left( 1+ \frac{y_{2}}{y_{1}} \right) f} \cdot \frac{ \tan \alpha}{ \tan \beta}⑧:y2y1=d2−(1+y1y2)f(1+y2y1)f−d1⋅tanβtanα
将①代入⑧得:
y1y2=(1+y1y2)d1d2d1+d2−d1d2−(1+y2y1)d1d2d1+d2⋅tanαtanβ\frac{y_1}{y_2}= \frac{ \left( 1+ \frac{y_1}{y_2} \right) \frac{d_1d_2}{d_1+d_2}-d_1}{d_2- \left( 1+ \frac{y_2}{y_1} \right) \frac{d_1d_2}{d_1+d_2}} \cdot \frac{ \tan \alpha}{ \tan \beta}y2y1=d2−(1+y1y2)d1+d2d1d2(1+y2y1)d1+d2d1d2−d1⋅tanβtanα
=−d2d1+d2+d1d2d1+d2×y1y2d22d1+d2−d1d2d1+d2×y2y1⋅tanαtanβ=d1(y1y2d2−d1)d2(d2−y2y1d1)⋅tanαtanβ= \frac{\frac{-d^2}{d_1+ d_2}+\frac{d_1d_2}{ d_1+d_2}\times\frac{y_1}{ y_2}}{\frac{{d_2}^2}{d_1+d_2}-\frac{{d}_1d_2}{{d}_1+d_2}\times\frac{y_2}{y_1}}\cdot\frac{\tan\alpha}{\tan\beta}=\frac{{d}_1\left(\frac{y_1}{y_2}d _2-{d}_1\right)}{d_2\left( d_2-\frac{y_2}{y_1} {d}_1\right)}\cdot\frac{\tan\alpha}{\tan\beta}=d1+d2d22−d1+d2d1d2×y1y2d1+d2−d2+d1+d2d1d2×y2y1⋅tanβtanα=d2(d2−y1y2d1)d1(y2y1d2−d1)⋅tanβtanα
=d1d2⋅y1y2⋅tanαtanβ=\frac{d_1}{d_2} \cdot \frac{y_1}{y_2} \cdot \frac{ \tan \alpha}{ \tan \beta}=d2d1⋅y2y1⋅tanβtanα
即:
y1y2=d1d2⋅y1y2⋅tanαtanβ\frac{y_1}{y_2}= \frac{d_1}{d_2} \cdot \frac{y_1}{y_2} \cdot \frac{ \tan \alpha}{ \tan \beta}y2y1=d2d1⋅y2y1⋅tanβtanα
最终得:
d1⋅tana=d2⋅tanβd_{1} \cdot \tan a=d_{2} \cdot \tan \betad1⋅tana=d2⋅tanβ
所以,在被拍摄的倾斜主体平面、镜头的等效光学平面、相机传感器所在的成像平面这三个平面调整至相交于同一条直线时,物体可以在传感器上清晰成像。