halcon3d gen_image_to_world_plan3_map与project_3d_point
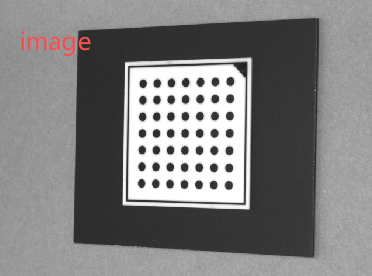
在这里说明一个问题,就是我得到了image到空间坐标系pose下的map关系。
如何将image_map下求得的具体点,再通过project_3d_point求出在image中具体位置!
一般的流程是这样的
一,通过CamParam,Pose,可以获取map图,PixelDist代表的是image_map中一个像素点的尺寸,这个是可以计算的。
gen_image_to_world_plane_map (Map, CamParam, Pose, Width, Height, Width, Height, PixelDist, 'bilinear')
二,对图像进行向pose下,z=0的平面进行map
map_image (Image, Map, image_map)
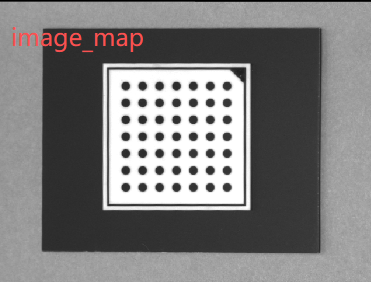
三,此时如果想求imag_map中第一个原点的圆心,对应到image中的坐标。应该这么来操作