最优控制3 -- 动态规划-一个解析解的例子
文章目录
- 前言
- 正文
前言
本系列是个人在b站大学学习【DR_CAN】的最优控制教程的笔记,主要用于记录和方便随时知识回顾。
感谢DR_CAN精彩的讲解,附bilibili视频链接:【最优控制-合集】
这节很简单,但是超级重要!超级重要!超级重要! 我希望大家可以自己动手推一下,这样印象深刻一些。这是LQR/iLQR的基础,对于理解LQR/iLQR算法的递推很有帮助。
正文
上一节讨论了贝尔曼最优理论,并讨论了使用数值方法求解最优解的过程,这一节将从一个简单的例子讲解动态规划的解析方法。
考虑一个单输入,单状态的例子。计算2步后系统达到目标状态的最优控制的代价。
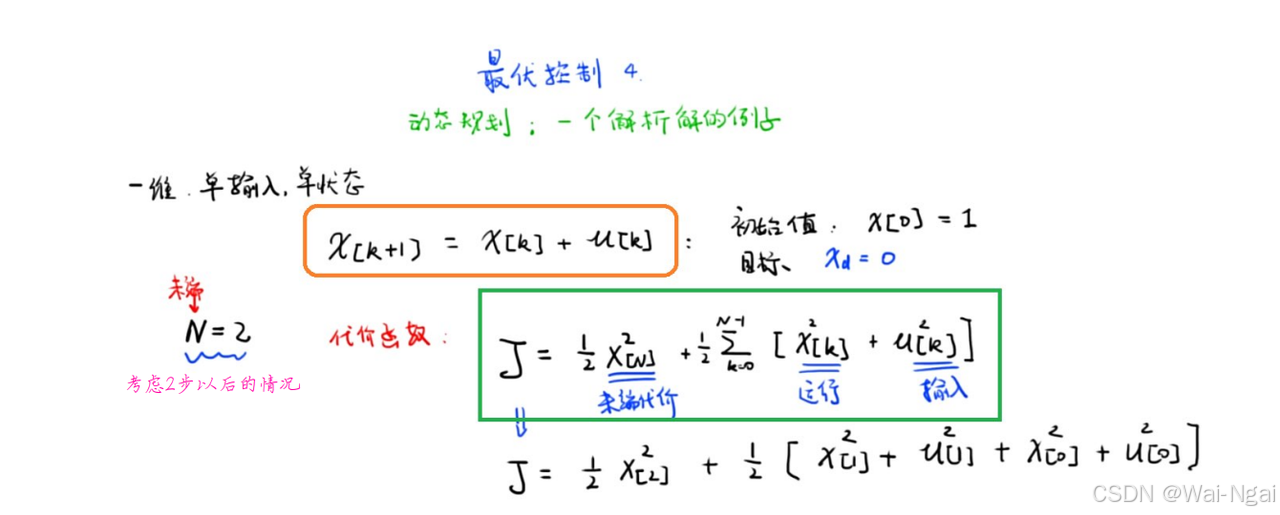
很显然,可以给两个特殊的策略,直接计算出N=2时的代价。
![[图片]](https://i-blog.csdnimg.cn/direct/696dd2e1b34a4d6b8234808028bb5621.png)
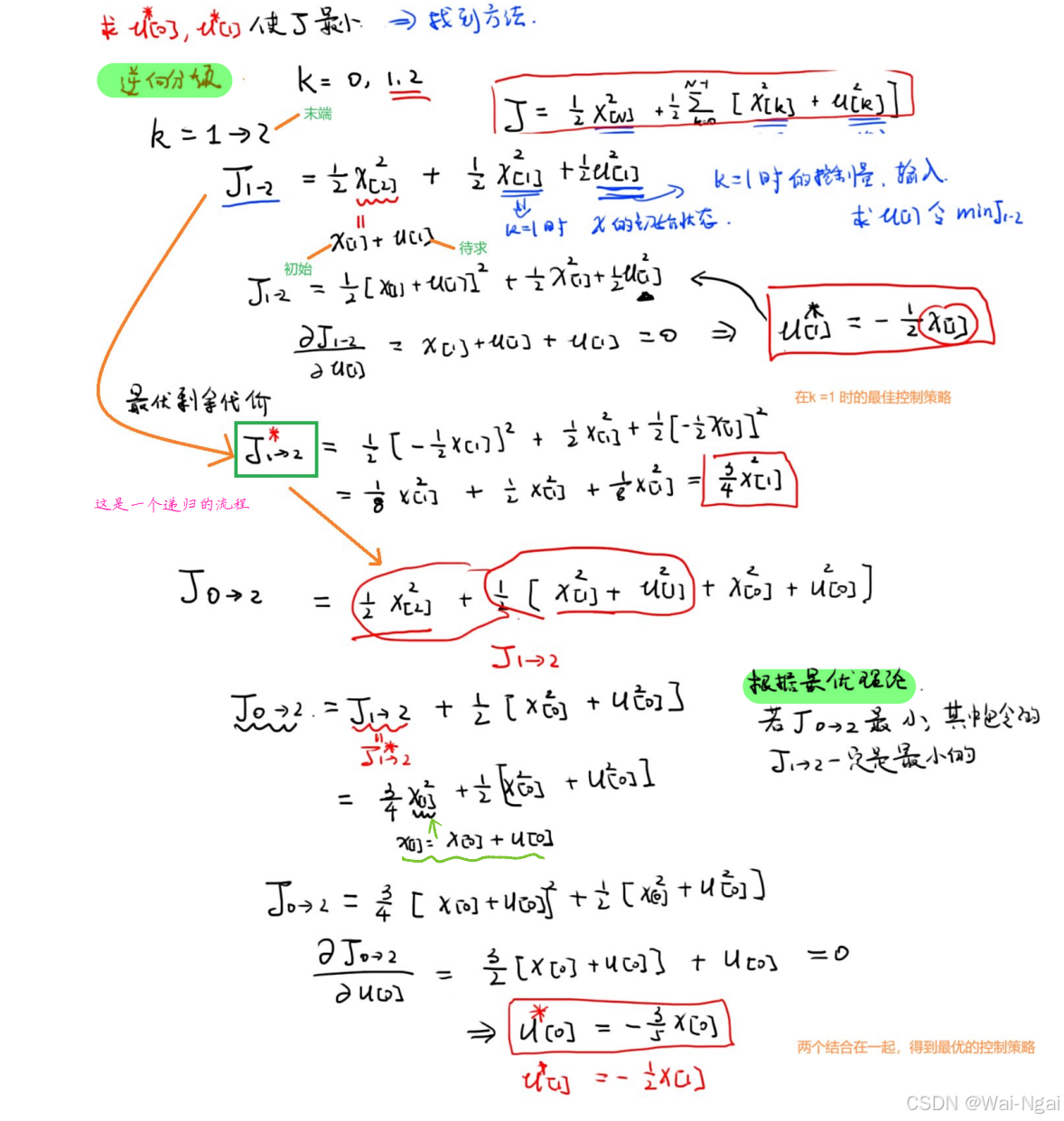
那么如何得到最优的控制序列,使得代价最小呢?下面采用解析的方法。
可以采用逆向分级的思路,先计算J1→2J_{1\to 2}J1→2,再计算J0→2J_{0\to 2}J0→2
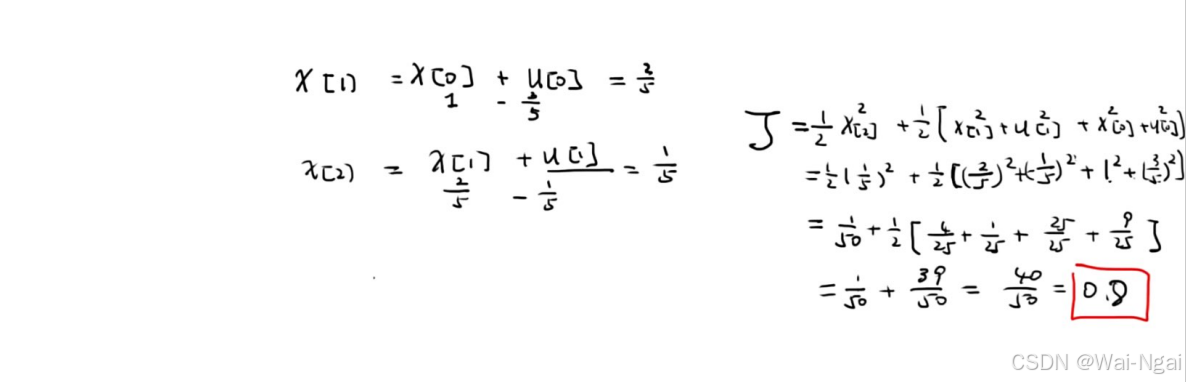
将上面的最优控制策略,带入代价函数,可以得到最优的代价:0.8
这是一个递归的过程。